

(1).jpg)


Проект Приказа Министерства транспорта РФ "Об утверждении федеральных авиационных правил "Требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения" (подготовлен Минтрансом России 18.09.2023)
Досье на проект
В соответствии со статьей 48 Воздушного кодекса Российской Федерации, пунктом 1 и подпунктом 5.2.53.8 пункта 5 Положения о Министерстве транспорта Российской Федерации, утвержденного постановлением Правительства Российской Федерации от 30 июля 2004 г. N 395, приказываю:
1. Утвердить прилагаемые Федеральные авиационные правила "Требования к светосигнальному и метеорологическому оборудованию, устанавливаемому на сертифицированных аэродромах, предназначенных для взлёта, посадки, руления и стоянки гражданских воздушных судов, а также радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения".
2. Настоящий приказ вступает в силу с 1 сентября 2024 года и действует до 1 сентября 2030 г.
| Министр | В.Г. Савельев |
УТВЕРЖДЕНЫ
приказом Минтранса России
от_________2023 г. N____
ФЕДЕРАЛЬНЫЕ АВИАЦИОННЫЕ ПРАВИЛА
Требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения
I. Общие положения
1. Федеральные авиационные правила "Требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения" (далее - Правила) разработаны в соответствии со ст. 48 Воздушного кодекса Российской Федерации и устанавливают требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения воздушных судов гражданской авиации в воздушном пространстве Российской Федерации.
Указанные в настоящих Правилах требования не предъявляются к оборудованию, сертифицированному в установленном порядке и введенному в эксплуатацию до вступления в силу Правил
2. Настоящие Правила обязательны для руководства и исполнения всеми физическими и юридическими лицами, осуществляющими эксплуатацию, разработку, производство, проектирование, монтажные и пусконаладочные работы радиотехнического оборудования и оборудования авиационной электросвязи, используемого для обслуживания воздушного движения в гражданской авиации.
3. К радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения (далее - средства РТОП), относятся:
средства и системы наблюдения;
системы визуального наблюдения;
средства и системы радионавигации и посадки воздушных судов;
средства и системы авиационной электросвязи;
средства и системы автоматизации управления воздушным движением.
4. Общие требования к радиотехническому оборудованию и оборудованию авиационной электросвязи приведены в приложении N 1, требования к отдельным типам оборудования указаны в приложениях NN 2 - 21.
II. Требования к средствам и системам наблюдения
5. К средствам и системам наблюдения, используемым в целях обеспечения обслуживания воздушного движения, относятся:
обзорный радиолокатор трассовый (далее - ОРЛ-Т);
обзорный радиолокатор аэродромный (далее - ОРЛ-А);
вторичный радиолокатор (далее - ВРЛ);
трассовый радиолокационный комплекс (далее - ТРЛК);
аэродромный радиолокационный комплекс (далее - АРЛК);
радиолокационная система обзора летного поля (далее - РЛС ОЛП);
многопозиционная система наблюдения аэродромная (далее - МПСН-А);
многопозиционная система наблюдения широкозонная (далее - МПСН-Ш);
многопозиционная система наблюдения интегрированная (далее - МПСН-И);
наземная система радиовещательного автоматического зависимого наблюдения (далее - система АЗН-В);
6. Обзорный радиолокатор трассовый (первичный) предназначен для обнаружения и определения координат воздушных судов (азимут и дальность) на маршрутах ОВД (воздушных трассах) и вне их и последующей передачи информации о воздушной обстановке в региональный и/или аэроузловой диспетчерский центр ОВД.
6.1. Антенная система ОРЛ-Т юстируется таким образом, чтобы нулевой азимут ОРЛ-Т совпадал с северным направлением истинного меридиана.
6.2. Период обновления информации ОРЛ-Т составляет не более десяти секунд.
6.3. Требования к ОРЛ-Т представлены в приложении N 2.
7. Обзорный радиолокатор аэродромный (первичный) предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в районе аэродрома и последующей передачи информации о воздушной обстановке в аэродромный диспетчерский центр ОВД.
7.1. Антенная система ОРЛ-А юстируется таким образом, чтобы нулевой азимут ОРЛ-А совпадал с северным направлением магнитного меридиана.
7.2. Период обновления информации ОРЛ-А составляет не более пяти секунд.
7.3. Требования к ОРЛ-А представлены в приложении N 3.
8. Вторичный радиолокатор предназначен для обнаружения и определения координат ВС (азимут-дальность), запроса и приема дополнительной информации от воздушных судов, оборудованных приемоответчиками вторичной радиолокации режимов "A/C", "S" и/или "УВД", а также приемоответчиками, функционирующими в открытых режимах Единой системы государственного фрадиолокационного опознавания (далее - ЕС ГРЛО), и последующей выдачи информации о воздушной обстановке в центр ОВД.
8.1. Период обновления информации ВРЛ, используемой для обслуживания воздушного движения на маршрутах ОВД и вне их, во внеаэародромном воздушном пространстве составляет не более десяти секунд, а в аэродромном воздушном пространстве - не более пяти секунд.
8.2. Требования к ВРЛ представлены в приложении N 4.
9. ТРЛК предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов на маршрутах ОВД и вне их, запроса и приема дополнительной информации от воздушных судов, оборудованных приемоответчиками вторичной радиолокации, и последующей передачи информации о воздушной обстановке в региональные и/или аэроузловые диспетчерские центры ОВД.
9.1. В состав ТРЛК входят первичный обзорный радиолокатор и вторичный радиолокатор режимов "A/C", а также могут входить вторичные радиолокаторы режимов "S", "УВД" и/или ЕС ГРЛО.
9.2. Первичный обзорный радиолокатор, входящий в состав ТРЛК, удовлетворяет требованиям, предъявляемым к ОРЛ-Т.
9.3. Вторичные радиолокаторы режимов "A/C", "S", "УВД" и ЕС ГРЛО, входящие в состав ТРЛК, удовлетворяют требованиям, предъявляемым к ВРЛ, предназначенному для обслуживания воздушного движения на маршрутах ОВД и вне их во внеаэродромном воздушном пространстве.
9.4. Координатная и дополнительная информация от ОРЛ-Т и ВРЛ, входящих в состав ТРЛК, объединяются на выходе ТРЛК.
10. АРЛК предназначен для обнаружения и определения координат воздушных судов (азимут и дальность) в районе аэродрома, а также запроса и приема дополнительной информации от воздушных судов, оборудованных приемоответчиками вторичной радиолокации и последующей передачи информации о воздушной обстановке в аэродромный диспетчерский центр ОВД.
10.1. В состав АРЛК входят первичный обзорный радиолокатор и вторичный радиолокатор режимов "A/C", а также могут входить вторичные радиолокаторы режимов "S", "УВД" и/или ЕС ГРЛО.
10.2. Первичный обзорный радиолокатор, входящий в состав АРЛК, удовлетворяет требованиям, предъявляемым к ОРЛ-А.
10.3. Вторичные радиолокаторы режимов "A/C", "S", "УВД" и ЕС ГРЛО, входящие в состав АРЛК, удовлетворяют требованиям, предъявляемым к ВРЛ, предназначенному для обслуживания воздушного движения в районе аэродрома.
11. РЛС ОЛП предназначена для обнаружения и определения координат воздушных судов, наземных транспортных средств и других объектов, находящихся на площади маневрирования аэродрома, и последующей передачи информации в аэродромный диспетчерский центр ОВД. Кроме того, РЛС ОЛП может использоваться для обнаружения и определения координат воздушных судов, наземных транспортных средств и других объектов, находящихся на перроне и стоянках воздушных судов.
11.1. В состав РЛС ОЛП входят одна или несколько радиолокационных станций (датчиков) обзора летного поля, средства обработки (объединения), средства отображения и средства регистрации радиолокационной информации. Средства обработки (объединения), средства отображения и средства регистрации радиолокационной информации РЛС ОЛП конструктивно могут входить в состав комплекса средств автоматизации управления воздушным движением.
11.2. Тактико-технические требования к РЛС ОЛП представлены в приложении N 5.
12. МПСН-А предназначена для обнаружения и определения местоположения воздушных судов, находящихся на площади маневрирования аэродрома, на конечном участке захода на посадку, выполняющих посадку или взлет, а также находящихся на площади маневрирования наземных транспортных средств и других объектов, оборудованных приемоответчиком вторичной радиолокации режима "А/С", "S" или транспондером автоматического зависимого наблюдения расширенного сквиттера 1090ES, и последующей передачи информации в аэродромный диспетчерский центр ОВД.
12.1. МПСН-А может использоваться для обнаружения и определения координат воздушных судов, наземных транспортных средств и других объектов, находящихся на перроне и стоянках воздушных судов.
12.2. Тактико-технические требования к МПСН-А представлены в Приложении N 6.
13. МПСН-Ш предназначена для обнаружения и определения местоположения воздушных судов, оборудованных приемоответчиком вторичной радиолокации режима "А/С" или "S" или транспондером автоматического зависимого наблюдения расширенного сквиттера 1030/1090ES, в верхнем и нижнем воздушном пространстве и последующей передачи информации в диспетчерский центр ОВД.
13.1. Тактико-технические требования к МПСН-Ш представлены в Приложении N 7.
14. МПСН-А и МПСН-Ш могут быть объединены в многопозиционную систему наблюдения интегрированную (МПСН-И).
14.1. МПСН-И соответствует требованиям МПСН-А и МПСН-Ш.
15. Система АЗН-В состоит из комплекса наземного и бортового радиотехнического оборудования и предназначена для наблюдения за воздушными судами, оборудованными приемоответчиками или транспондерами АЗН-В, обеспечивающими передачу информации об опознавательном индексе, местоположении воздушных судов и иной информации, используя радиовещательный режим линии передачи данных, и последующей передачи информации в центры ОВД.
15.1. В качестве линий передачи данных в системе АЗН-В используются линия расширенного сквиттера (1090ES) или линия самоорганизующегося множественного доступа с временным разделением режима 4 (VDL-4).
15.2. Наземное оборудование системы АЗН-В функционально состоит из одной приемной (приемо-передающей) наземной станции АЗН-В или распределенной сети приемных (приемо-передающих) наземных станций АЗН-В со средствами обработки/объединения данных и распределения донесений АЗН-В.
15.3. Тактико-технические требования к системе АЗН-В представлены в приложении N 8.
III. Требования к системе визуального наблюдения
16. Система визуального наблюдения - электрооптическая система, обеспечивающая электронное визуальное отображение воздушных судов, транспортных средств, людей и других объектов, находящихся на площади маневрирования аэродрома и в прилегающем воздушном пространстве, а также любой другой информации, необходимой для поддержания ситуационной осведомленности на аэродроме и в его окрестностях.
16.1. Система визуального наблюдения включает компоненты:
1) средства оптико-электронного наблюдения, которые могут включать:
комплект стационарных телевизионных камер (далее - ТВ камера) для формирования панорамного изображения площади маневрирования аэродрома;
комплект стационарных камер инфракрасного диапазона (далее - ИК камера) для формирования панорамного изображения площади маневрирования аэродрома в темное время суток;
стационарные и поворотные ТВ камеры для формирования фрагментов изображения площади маневрирования аэродрома;
стационарные и поворотные ИК камеры для формирования фрагментов изображения площади маневрирования аэродрома в темное время суток;
2) средства передачи (трансляции) информации, формируемой ТВ камерами и ИК камерами;
3) средства обработки информации, формируемой ТВ камерами и ИК камерами;
4) средства отображения информации визуального наблюдения на рабочих местах диспетчеров управления воздушным движением;
5) средства регистрации информации визуального наблюдения.
Компоненты системы визуального наблюдения могут быть объединены в комплекс средств автоматизации удаленного видеонаблюдения.
16.2. Средства обработки, отображения и регистрации информации визуального наблюдения конструктивно могут быть объединены в одно устройство, а также входить в состав комплекса средств автоматизации управления воздушным движением.
16.3. Тактико-технические требования к системе визуального наблюдения представлены в приложении N 9.
IV. Требования к средствам и системам радионавигации и посадки
17. К средствам и системам радионавигации и посадки воздушных судов относятся:
всенаправленный ОВЧ радиомаяк азимутальный (далее - РМА);
всенаправленный УВЧ радиомаяк дальномерный (далее - РМД);
приводная радиостанция (далее - ПРС);
маркерный радиомаяк (далее - МРМ);
радиомаячная система инструментального захода воздушного судна на посадку (далее - РМС);
локальная контрольно-корректирующая станция ГНСС (далее - ЛККС).
18. РМА предназначен для определения на борту воздушного судна азимута относительно места установки радиомаяка при полетах воздушного судна по маршрутам ОВД, вне их и в районе аэродрома.
18.1. Тактико-технические требования к РМА представлены в приложении N 10.
19. РМД предназначен для определения на борту воздушного судна дальности относительно места установки радиомаяка при полетах воздушных судов по маршрутам ОВД, вне их и в районе аэродрома.
19.1, РМД может использоваться в составе радиомаячной системы инструментального захода на посадку для определения на борту воздушного судна дальности до порога ВПП в точках, где требуется сравнение установленной высоты полета с показаниями бортового высотомера. В этом случае РМД является навигационно-посадочным радиомаяком дальномерным (РМД-НП).
19.2. Тактико-технические требования к РМД представлены в приложении N 11.
20. ПРС используются в качестве трассовой или аэродромной отдельной приводной радиостанции (далее - ОПРС), а также входят в состав дальнего приводного радиомаяка (далее - ДПРМ) и ближнего приводного радиомаяка (далее - БПРМ).
20.1. В состав ДПРМ и БПРМ, помимо ПРС, входят соответственно дальний МРМ и ближний МРМ.
20.2. Трассовая ОПРС предназначена для обозначения контрольного пункта на маршруте ОВД, привода воздушного судна, оснащенного автоматическим радиокомпасом, в заданный район воздушного пространства, выполнения маневра и выдерживания направления полета воздушного судна.
В состав трассовой ОПРС может входить МРМ для дополнительного информирования экипажа воздушного судна о пролете ОПРС.
20.3. Аэродромная ОПРС предназначена для привода воздушного судна в район аэродрома, выполнения предпосадочного маневра, выдерживания курса посадки воздушным судном.
В состав аэродромной ОПРС может входить МРМ для дополнительного информирования экипажа воздушного судна о пролете ОПРС.
Требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения"20.4. ДПРМ предназначен для привода воздушного судна в район аэродрома, выполнения предпосадочного маневра, выдерживания курса посадки, а также формирования контрольных точек начального, промежуточного и конечного этапов захода на посадку.
20.5. БПРМ предназначен для обеспечения выдерживания курса посадки воздушным судном и формирования контрольной точки прерванного захода на посадку.
20.6. ДПРМ и БПРМ образуют систему посадки ОСП (оборудование системы посадки).
20.7. ПРС, входящие в состав ДПРМ, БПРМ и аэродромной ОПРС, при появлении помех на основной (рабочей) радиочастоте должны обеспечивать работу на резервных радиочастотах 355 кГц или 725 кГц.
20.8. Тактико-технические требования к ПРС представлены в приложении N 12.
21. Маркерный радиомаяк предназначен для передачи информации о моменте пролета воздушным судном МРМ, установленного в фиксированной точке (на определенном расстоянии от порога ВПП).
21.1. Маркерный радиомаяк используется в качестве ближнего (БМРМ), дальнего (ДМРМ) или внутреннего (ВМРМ) маркерного радиомаяка.
21.2. МРМ обеспечивает излучение сигналов на частоте 75 МГц с амплитудной модуляцией несущей ВМРМ сигналом частотой 3000 Гц, БМРМ - 1300 Гц, ДМРМ - 400 Гц.
21.3. БМРМ располагается таким образом, чтобы обеспечивать экипаж воздушного судна информацией о близости начала использования визуальных средств захода на посадку.
Антенна БМРМ размещается на расстоянии 900 - 1200 м от порога ВПП на продолжении осевой линии ВПП с боковым смещением не более, чем на 75 м.
21.4. ДМРМ располагается таким образом, чтобы обеспечить экипажу воздушного судна возможность проверки высоты полета, удаления до порога ВПП и функционирования бортового оборудования на конечном этапе захода на посадку.
Антенна ДМРМ размещается на расстоянии до 7200 м от порога ВПП на продолжении осевой линии ВПП с боковым смещением не более, чем на 75 м.
21.5. На аэродромах, обеспечивающих заход на посадку по категории II или III ИКАО, а также на аэродромах, имеющих сложный рельеф местности в зоне захода воздушных судов на посадку, дополнительно может устанавливаться ВМРМ, предназначенный для передачи экипажу воздушного судна информации о непосредственной близости порога ВПП.
Антенна ВМРМ размещается на расстоянии от 75 м до 450 м от порога ВПП на продолжении оси ВПП с боковым смещением не более, чем 30 м в сторону от нее.
21.3. Тактико-технические требования к МРМ представлены в приложении N 13.
22. РМС состоит из комплекса наземного и бортового радиотехнического оборудования и предназначена для передачи навигационных сигналов, обеспечивающих формирование на борту воздушного судна и выдачи экипажу и в пилотажно-навигационный комплекс ВС информации о значении и знаке отклонения от номинальной траектории снижения, а также для определения моментов пролета характерных точек на траектории захода на посадку.
22.1. В состав наземного комплекса радиомаячной системы посадки входят:
курсовой радиомаяк (далее - КРМ) с системой контроля и дистанционного управления;
глиссадный радиомаяк (далее - ГРМ) с системой дистанционного управления и контроля;
маркерные радиомаяки ДМРМ и БМРМ либо дальномерный радиомаяк навигационно-посадочный (РМД-НП) с системой дистанционного управления и контроля.
Кроме того, в состав РМС может входить ВМРМ с системой дистанционного управления и контроля.
Системы дистанционного управления и контроля всех радиомаяков, входящих в состав РМС, могут быть объединены в одну общую систему дистанционного управления и контроля РМС.
22.2. РМС подразделяются на системы I, II, III категорий ИКАО (далее - РМС-I, РМС-II, РМС-III соответственно).
22.3. РМС-I обеспечивает наведение от границы зоны действия РМС до точки, в которой линия курса, заданная КРМ, пересекает линию глиссады на высоте 30 м над горизонтальной плоскостью, проходящей через порог ВПП.
22.4. РМС-II обеспечивает наведение от границы зоны действия РМС до точки, в которой линия курса, заданная КРМ, пересекает линию глиссады на высоте 15 м над горизонтальной плоскостью, проходящей через порог ВПП.
22.5. РМС-III обеспечивает наведение от границы зоны действия РМС до поверхности ВПП и при рулении ВС по ВПП после посадки.
22.6. Тактико-технические требования к РМС представлены в приложении N 14.
23. На аэродромах, где РМС обеспечивают противоположные направления одной ВПП, или РМС, обеспечивающие различные ВПП, используют одинаковые частотные каналы, должны быть приняты меры, гарантирующие, что в любой момент времени сигналы излучаются только одной РМС. При этом во время перехода с одной РМС на другую они не излучают сигналы в течение не менее, чем 20 с.
24. КРМ представляет собой наземное радиотехническое устройство, излучающее в пространство радиосигналы, содержащие информацию для определения местоположения воздушного судна относительно посадочного курса при выполнении захода на посадку.
24.1. Излучение антенной системы курсового радиомаяка создает составную диаграмму поля, модулированную по амплитуде сигналами тональных частот 90 Гц и 150 Гц. Эта диаграмма излучения образует сектор курса, в котором на линии курса уровни модуляции сигналами 90 Гц и 150 Гц равны, слева преобладает глубина модуляции несущей высокой частоты тональным сигналом 90 Гц, а справа - глубина модуляции несущей тональным сигналом 150 Гц (для наблюдателя, находящегося со стороны захода на посадку и обращенного лицом к курсовому радиомаяку).
24.2. Курсовой радиомаяк работает в диапазоне 108-111,975 МГц.
Используются две несущие высокой частоты, разнос несущих частот составляет не менее 5 кГц и не более 14 кГц симметрично по обе стороны от присвоенной частоты. Допуск по частоте каждой несущей не превышает 0,002 %.
Может использоваться одна несущая высокой частоты, в таком случае допуск по частоте составляет не более ±0,005 %.
Поляризация излучения вертикальная.
24.3. Курсовой радиомаяк излучает сигналы, обеспечивающие удовлетворительную работу типовой бортовой установки в пределах зон действия курсового и глиссадного радиомаяков. Зона действия курсового радиомаяка простирается от центра его антенной системы на следующие расстояния:
46,3 км в пределах ±10° от линии курса;
31,5 км в пределах 10-35° от линии курса;
Там, где это диктуется топографическими особенностями местности или допускается эксплуатационными требованиями, дальность действия КРМ может быть уменьшена до 33,3 км в пределах зоны действия ±10° и до 18,5 км в пределах остальной зоны действия в тех случаях, когда другие навигационные средства обеспечивают удовлетворительную навигацию в промежуточной зоне захода на посадку.
Сигналы курсового радиомаяка принимаются на указанных выше расстояниях на высоте 600 м и выше над превышением порога или 300 м над превышением самой высокой точки в промежуточной и конечной зонах захода на посадку или на минимальной безопасной высоте (берется большее превышение).
Допускается линейное повышение нижней границы зоны действия КРМ от указанной высоты до 1350 м секторе от 15° до 35° от линии курса. Такие сигналы принимаются на указанных выше расстояниях вплоть до поверхности, простирающейся от антенны курсового радиомаяка и имеющей наклон 7° относительно горизонтальной плоскости.
Нижняя граница зоны действия КРМ из состава РМС-I и РМС-II устанавливается на высоте ниже минимальной относительной высоты принятия решения (DH) точного захода на посадку категории I и II соответственно.
24.4. РМС категорий I, II и III обеспечивают индикацию эксплуатационного состояния всех наземных компонентов РМС на назначенных дистанционных пунктах управления.
24.5. На ВПП точного захода на посадку категории III должно быть установлено оборудование контроля дальнего поля курсового маяка РМС. Аппаратура контроля дальнего поля размещается согласно эксплуатационной документации и должна функционировать независимо от объединенных приборов контроля и аппаратуры контроля ближнего поля.
24.6. Курсовой радиомаяк обеспечивает одновременную передачу международным кодом Морзе опознавательного сигнала, относящегося к конкретной ВПП и направлению захода на посадку, на той же несущей или несущих высокой частоты, которые используются для выполнения основной функции курсового радиомаяка. Передача опознавательного сигнала никоим образом не мешает выполнению основной функции курсового радиомаяка.
24.7. Допускается использование КРМ для неточного захода на посадку в случае отсутствия (неисправности) ГРМ при наличии опубликованной в документах аэронавигационной информации карты захода на посадку по приборам с использованием КРМ.
24.8. Антенна КРМ устанавливается на продолжении осевой линии ВПП со стороны направления, противоположного стороне захода воздушного судна на посадку, боковое смещение центра антенны КРМ от продолжения осевой линии ВПП не допускается.
Минимальное расстояние места установки КРМ от конца ВПП должно определяться с соблюдением следующих условий:
размещение антенн КРМ и контрольного оборудования на концевой полосе безопасности запрещается;
сооружения и антенны КРМ должны удовлетворять требованиям к ограничению высотных препятствий.
24.9. Оборудование КРМ настраивается таким образом, чтобы линия курса находилась в вертикальной плоскости, проходящей через осевую линию данной ВПП.
25. ГРМ представляет собой наземное радиотехническое устройство, излучающее в пространство радиосигналы, содержащие информацию для определения местоположения воздушного судна относительно установленного угла наклона линии глиссады при выполнении захода на посадку до высоты принятия решения.
25.1. Антенна ГРМ устанавливается относительно порога ВПП таким образом, чтобы обеспечивалась требуемая высота опорной точки.
25.2. Аппаратура ГРМ должна обеспечивать возможность устанавливать угол наклона глиссады от 2° до 4° относительно горизонтали.
Угол наклона глиссады рекомендуется устанавливать равным 3°. Углы наклона глиссады РМС, превышающие 3°, следует использовать лишь в тех случаях, когда практически невозможно иным способом удовлетворить требования по безопасному пролету препятствий.
25.3. Высота опорной точки РМС для РМС категорий II и III должна быть равной 15 м (50 фут), при этом разрешается допуск до +3 м (10 фут).
Высоту опорной точки РМС для РМС категории I рекомендуется устанавливать равной 15 м (50 фут), при этом разрешается допуск до +3 м (10 фут).
26. Для обеспечения стабильности сигналов РМС в пространстве на аэродроме устанавливаются критические зоны курсового и глиссадного радиомаяков РМС.
26.1. Критическая зона КРМ в передней полусфере представляет собой часть летного поля аэродрома прямоугольной формы шириной 120 м в обе стороны от осевой линии ВПП и длиной от антенной системы КРМ до порога ВПП данного направления посадки.
Конфигурация и размеры критической зоны КРМ в задней полусфере определяются эксплуатационной документацией на конкретный тип РМС.
26.2. Критическая зона ГРМ представляет собой часть летного поля аэродрома прямоугольной формы, ограниченной линиями:
в продольном направлении - дальней от ГРМ боковой границей ВПП и условной линией, расположенной параллельно ВПП на расстоянии 60 м от антенной системы ГРМ в противоположную сторону от ВПП;
в поперечном направлении - условными линиями, перпендикулярными оси ВПП, одна из которых расположена на расстоянии 10 м позади антенной системы ГРМ, а другая - на расстоянии 100 м от порога ВПП в сторону, противоположную направлению посадки воздушных судов.
26.3. Допускается изменение конфигурации и уменьшение размеров критических зон РМС с учетом местных условий на аэродроме, если результаты летной проверки подтверждают соответствие пространственных параметров сигналов КРМ и ГРМ нормативным требованиям.
26.4. Пересечение критических зон КРМ и ГРМ с рулежными дорожками и другими ВПП должно учитываться при маркировке мест ожидания воздушных судов (наземных транспортных средств).
В местах пересечения рулежных дорожек и внутриаэропортовых дорог с критическими зонами КРМ и ГРМ должны быть установлены предупреждающие знаки о запрете проезда без остановки и щиты с надписями "Критическая зона РМС. Проезд без разрешения диспетчера запрещен".
27. ЛККС представляет собой систему функционального дополнения наземного базирования ГНСС и предназначена для формирования и передачи воздушным судам дифференциальных поправок к псевдодальностям навигационных спутников и информации о целостности сигналов, излучаемых навигационными спутниками, данных о ЛККС, блоков посадочных и терминальных данных.
27.1. ЛККС совместно с навигационными спутниками ГНСС обеспечивает навигацию воздушного судна в районе аэродрома, неточный и точный заход на посадку и поддерживает выполнение процедур зональной навигации.
27.2. ЛККС подразделяются на системы уровня GAST A, B, C, D (I, II, III категорий ИКАО).
27.3. Аппаратура ЛККС должна обеспечивать возможность устанавливать угол наклона глиссады от 2° до 4° относительно горизонтали.
27.4. ЛККС вместе со средствами индикации на рабочих местах диспетчеров позволяет определить возможность выполнения неточного захода на посадку с вертикальным наведением APV, точного захода на посадку по типу используемых созвездий ГНСС (GPS, ГЛОНАСС, ГАЛИЛЕО и других), а также их комбинации и обеспечить регистрацию и хранение информации о состоянии навигационного обслуживания ГНСС в районе аэродрома и техническом состоянии ЛККС.
27.5. Тактико-технические требования к ЛККС представлены в приложении N 15.
28. Наземная станция регистрации данных ГНСС предназначена для определения состояния (мониторинга), регистрации и хранения информации о состоянии навигационного обслуживания ГНСС на маршруте и в районе аэродрома (посадочной площадки) .
28.1. Тактико-технические требования к станции регистрации данных ГНСС представлены в приложении N 16.
V. Требования к средствам и системам авиационной электросвязи
29. Авиационная подвижная электросвязь предназначена для обеспечения обмена голосовыми сообщениями и цифровыми данными:
между органами ОВД и экипажами воздушных судов;
между экипажами воздушных судов;
между поисково-спасательными и аварийно-спасательными службами и экипажами воздушных судов, терпящих или потерпевших бедствие, а также выполняющими поисково-спасательные и аварийно-спасательные работы.
К средствам и системам авиационной подвижной электросвязи относятся:
радиопередатчик, радиоприемник, радиостанция ОВЧ диапазона;
радиопередатчик, радиоприемник, радиостанция ВЧ диапазона;
автоматизированный приемо-передающий радиоцентр (АППЦ), приемный радиоцентр, передающий центр ОВЧ диапазона;
автоматизированный приемо-передающий радиоцентр (АППЦ), приемный радиоцентр, передающий центр ВЧ диапазона;
автономный радиоретранслятор (далее - АРТР) ОВЧ диапазона;
система коммутации речевой связи (далее - СКРС).
30. Тактико-технические требования к радиосредствам ОВЧ диапазона представлены в приложении N 17.
31. Тактико-технические требования к радиосредствам ВЧ диапазона представлены в приложении N 18.
32. СКРС предназначена для обеспечения:
двухсторонней радиосвязи в диапазонах ОВЧ и ВЧ между диспетчерами ОВД и экипажами ВС в телефонном или громкоговорящем режиме, двухсторонней ОВЧ и ВЧ радиосвязи "земля - земля" с подвижными объектами, а также для организации прослушивания радиоканалов VOLMET и ATIS на рабочих местах диспетчеров ОВД;
оперативно-командной телефонной связи диспетчеров ОВД, а также обслуживающего технического персонала;
телефонной связи диспетчеров центра ОВД, а также обслуживающего технического персонала;
внешней оперативно-командной телефонной связи с удаленными объектами взаимодействия (смежные районные центры, диспетчерские пункты подхода, аэропорты и аэродромы зоны и т.п.);
внешней телефонной связи по каналам сети речевой связи с объектами ОВД;
неоперативной телефонной связи через УПАТС, а также АТС телефонной сети связи общего пользования;
транзитной связи между абонентами и оборудованием внешних объектов взаимодействия центра ОВД по каналам радиосвязи, телефонной и громкоговорящей связи, транзитной передачи по цифровым каналам.
32.1. Тактико-технические требования к СКРС представлены в приложении N 19.
VI. Требования к средствам и системам автоматизации управления воздушным движением
33. К средствам и системам автоматизации управления воздушным движением относятся:
комплекс средств автоматизации управления воздушным движением (далее - КСА УВД);
комплекс средств автоматизации планирования использования воздушного пространства (далее - КСА ПИВП).
34. КСА УВД предназначен для обеспечения сбора, обработки и отображения информации наблюдения за воздушной обстановкой, информации планов полетов, аэронавигационной и метеорологической информации в целях обслуживания воздушного движения, осуществляемого органами обслуживания воздушного движения регионального, аэроузлового диспетчерского или аэродромного диспетчерского центра (органа ОВД).
34.1. В КСА УВД обеспечивается автоматический сбор и обработка информации о воздушной обстановке для выдачи на рабочие места:
графических отметок и координат местоположения воздушных судов и других объектов, находящихся в контролируемом пространстве;
дополнительной информации от воздушных судов, оборудованных приемоответчиками вторичной радиолокации, автоматического зависимого наблюдения радиовещательного типа и системы государственного радиолокационного опознавания.
34.2. Источниками информации наблюдения для КСА УВД могут быть:
трассовые и аэродромные обзорные радиолокаторы;
вторичные радиолокаторы режимов "A/С", "S", ЕС ГРЛО (в открытых режимах), "УВД";
трассовые и аэродромные радиолокационные комплексы;
наземные системы и станции автоматического зависимого наблюдения радиовещательного типа с линией передачи данных 1090 ES, VDL-4;
многопозиционные системы наблюдения;
радиолокационная система обзора летного поля;
взаимодействующие комплексы средств автоматизации УВД.
34.3. В КСА УВД обеспечивается:
прием, обработка информации от систем наблюдения;
прием, обработка радиопеленгационной информации от автоматических радиопеленгаторов (далее - АРП) и отображение линии пеленга на индикаторе воздушной обстановки рабочего места диспетчера УВД;
прием, обработка плановой и аэронавигационной информации от КСА ПИВП ее отображение на индикаторе воздушной обстановки рабочего места диспетчера УВД;
прием от автоматизированных информационных систем метеорологического обеспечения, распределение по рабочим местам (секторам) и отображение на индикаторе воздушной обстановки метеорологической информации;
обнаружение и предупреждение диспетчера УВД о прогнозируемых и фактических конфликтных ситуациях.
34.4. Тактико-технические требования к КСА УВД представлены в приложении N 20.
35. КСА ПИВП предназначен для автоматизации процессов стратегического, предтактического и тактического (текущего) планирования и координирования использования воздушного пространства, включая организацию потоков воздушного движения, с целью реализации разрешительного и уведомительного порядка использования воздушного пространства.
35.1. КСА ПИВП обеспечивает прием и обработку планов использования воздушного пространства, передачу пользователям воздушного пространства результатов обработки планов использования воздушного пространства, формирование разрешений на использование воздушного пространства, передачу в органы обслуживания воздушного движения (управления полетами) и в другие взаимодействующие органы и организации информации о разрешениях на использование воздушного пространства, стандартных сообщений, касающихся обслуживания воздушного движения и осуществления иной деятельности по использованию воздушного пространства, аэронавигационной информации, информации об ограничениях использования воздушного пространства.
35.2. Тактико-технические требования к КСА ПИВП представлены в приложении N 21.
ПРИЛОЖЕНИЕ N 1
к Правилам (п. 4)
Общие требования к средствам наблюдения, навигации, посадки, авиационной электросвязи и автоматизации центров управления воздушным движением
1. Оборудование должно сохранять работоспособность в следующих условиях:
а) для оборудования, устанавливаемого на открытом воздухе и в неотапливаемых помещениях:
температура воздуха от минус 50 °C до плюс 50 °C;
повышенная относительная влажность воздуха до 98% при температуре 25 °C;
атмосферное пониженное давление до 600 гПа (450 мм рт. ст.);
атмосферные конденсированные осадки (роса, иней) и атмосферные выпадаемые осадки (дождь, снег);
воздушный поток до 30 м/с для подвижных антенно-фидерных устройств;
б) для оборудования, устанавливаемого в отапливаемых помещениях и сооружениях:
температура воздуха от 5 °C до 40 °C;
повышенная относительная влажность воздуха до 80% при температуре 25 °C;
стандартное атмосферное давление 1013 гПа (760 мм рт. ст.);
рекомендация: атмосферное пониженное давление до 700 гПа (525 мм рт. ст.);
в) для оборудования, устанавливаемого в помещениях с кондиционированием воздуха:
температура воздуха от 10 °C до 35 °C;
повышенная относительная влажность воздуха до 80% при температуре 25 °C;
стандартное атмосферное давление 1013 гПа (760 мм рт. ст.);
рекомендация: атмосферное пониженное давление до 700 гПа (525 мм рт. ст.);
г) оборудование, устанавливаемое на автотранспорте:
температура воздуха от минус 50° до плюс 55 °C;
повышенная относительная влажность воздуха до 98% при 25 °C;
стандартное атмосферное давление 1013 гПа (760 мм рт. ст.);
рекомендация: атмосферное пониженное давление до 700 гПа (525 мм рт. ст.);
атмосферные конденсированные осадки (роса, иней);
синусоидальная вибрация в диапазоне частот от 1 до 80 Гц с амплитудой ускорения до 40 м/с2 (4 g);
воздействие механических ударов многократного действия с длительностью ударного импульса от 5 до 10 мс и пиковым ударным ускорением 147 м/с2 (15 g);
д) оборудование авиационной электросвязи, устанавливаемое на открытом воздухе, должно сохранять свои параметры при акустическом шуме с уровнем звукового давления 100 дБ в диапазоне частот от 50 до 10 000 Гц (относительно 2·10 -5 Па).
2. Антенно-фидерные устройства (в состоянии покоя) должны выдерживать воздействие воздушного потока скоростью до 50 м/с.
3. Оборудование должно быть рассчитано на питание от сети переменного тока напряжением 380 В +/- 10% частотой (50 +/- 1) Гц или 220 В +/- 10% частотой (50 +/- 1) Гц.
4. Нестандартная контрольно-измерительная аппаратура, позволяющая производить проверку и регулировку оборудования в процессе эксплуатации, должна входить в комплект оборудования.
5. Все составные части аппаратуры, находящиеся под напряжением более 50 В переменного тока и более 120 В постоянного тока по отношению к корпусу, должны иметь защиту, обеспечивающую безопасность обслуживающего персонала.
6. В аппаратуре, имеющей напряжение свыше 1000 В при установившемся значении тока более 5 мА, на защитные, съемные и открывающиеся дверцы, крышки, кожухи, а также выдвижные блоки должны быть предусмотрены блокирующие устройства, обеспечивающие безопасность обслуживающего персонала.
7. Предельно допустимый уровень плотности потока энергии электромагнитного поля на рабочих местах, где предусмотрено постоянное или временное пребывание обслуживающего персонала, не должен превышать 10 мкВт/см2.
8. Система дистанционного управления и контроля должна обеспечивать контроль работоспособности, автоматический переход с неисправного на исправный комплект оборудования, передачу информации о техническом состоянии оборудования в пункт управления.
9. Оборудование должно иметь 100%-ный резерв, за исключением антенно-фидерных устройств. Если для конкретного типа оборудования не установлено обязательное наличие 100% резерва, допускается "скользящее" резервирование для группы одинаковых элементов оборудования, обеспечивающее его непрерывную, круглосуточную работу.
10. На каждый тип оборудования должны быть установлены и приведены в эксплуатационной документации показатели срока службы или ресурса, средней наработки на отказ, времени переключения на резерв.
11. Общее (системное) программное обеспечение должно включать операционную систему на базе UNIX-подобной операционной системы, а также сервисное программное обеспечение.
12. Все программные средства (системное программное обеспечение, операционные системы, базы данных, специальное программное обеспечение), используемые в работе оборудования, должны входить в единый реестр российских программ для электронных вычислительных машин и баз данных.
13. Информация, а также программное обеспечение, должны быть защищены от несанкционированного доступа.
14. Оборудование должно обеспечивать непрерывную, круглосуточную работу в процессе эксплуатации, за исключением плановых перерывов на проведение технического обслуживания, если это предусмотрено эксплуатационной документацией.
15. Эксплуатационная документация должна быть сброшюрована и должна содержать необходимую информацию по монтажу, использованию, техническому обслуживанию, транспортированию и хранению оборудования. Состав эксплуатационной документации должен соответствовать ГОСТ Р 2.601-2019.
ПРИЛОЖЕНИЕ N 2
к Правилам (п. 6.3)
Требования к обзорному радиолокатору трассовому (ОРЛ-Т)
1. В зависимости от максимальной дальности выделяют следующие типы ОРЛ-Т:
А - трассовые радиолокаторы с максимальной дальностью действия не менее 400 км;
Б - трассовые радиолокаторы с максимальной дальностью действия не менее 250 км.
2. В состав оборудования ОРЛ-Т должны входить:
антенно-фидерное устройство;
приемопередающее оборудование;
аппаратура обработки;
система дистанционного управления и контроля;
система отопления и кондиционирования;
дистанционный терминал;
средства сопряжения с каналами передачи информации;
система точного времени для синхронизации информации;
устройство документирования информации о воздушной обстановке;
источники бесперебойного питания;
комплект ЗИП;
комплект эксплуатационной документации.
3. Тактико-технические требования:
3.1 ОРЛ-Т (первичный), используя метод, основанный на излучении радиоволн и регистрации их отражений от объектов, должен обеспечивать обнаружение и определение координат местоположения ВС.
3.2 ОРЛ-Т должен работать в L-диапазоне (1215 - 1350 МГц) или в S-диапазоне (2,7 - 3,9 ГГц) волн.
3.3 Зона действия ОРЛ-Т при нулевых углах закрытия, вероятности обнаружения не хуже 0,8 для ВС с эффективной отражающей поверхностью 5 м2 и вероятности ложных тревог по собственным шумам приемника 10 -6 определяется следующими параметрами:
угол обзора в горизонтальной плоскости 360°;
минимальный угол места не более 0,5°;
максимальный угол места не менее 45°;
минимальная дальность не более 1,5 км (на высотах до 1,5 км);
максимальная дальность в соответствии с 1.1;
максимальная высота 20 000 м.
3.4 Период обновления радиолокационной информации должен быть не более 10 с.
3.5 Точностные характеристики ОРЛ-Т должны быть не хуже:
по дальности 120 м (СКО после цифровой обработки информации);
по азимуту 0,15° (СКО после цифровой обработки информации).
3.6 Разрешающая способность должна быть не хуже:
по дальности 300 м;
по азимуту 1,5°.
3.7 Среднее количество ложных отметок за обзор от всех видов непреднамеренных помех на выходе ОРЛ-Т после цифровой обработки не должно превышать 20.
3.8 В ОРЛ-Т должны постоянно контролироваться его основные тактико-технические характеристики и должна осуществляться автоматическая регистрация радиолокационной информации о воздушной обстановке, выдаваемой в центры (пункты) обслуживания воздушного движения.
3.9 Передача сообщений о ВС должна производиться в формате ASTERIX cat. 034 и cat. 048 или их последующих модификаций.
3.10 РЛИ, поступающая от ОРЛ-Т, должна содержать "метку времени", а также системные коды идентификации средств наблюдения (системный код региона - SAC, системный код идентификации - SIC).
Примечание: Под термином "метка времени" понимается момент времени UTC, соответствующий наступлению события, сопровождаемого меткой. Например, метка времени UTC по координате ВС соответствует моменту времени UTC, когда ВС имело заданные координаты.
3.11 Средний ресурс должен составлять не менее 100 000 ч.
3.12 Средний срок службы должен составлять не менее 15 лет.
3.13 Средняя наработка на отказ должна составлять не менее 10 000 ч.
3.14 Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ N 3
к Правилам (п. 7.3)
Требования к обзорному радиолокатору аэродромного (ОРЛ-А)
1. В зависимости от максимальной дальности выделяют следующие типы ОРЛ-А:
В - аэродромные радиолокаторы с максимальной дальностью действия более 160 км;
Г - аэродромные радиолокаторы с максимальной дальностью действия от 100 до 160 км;
Д - аэродромные радиолокаторы с максимальной дальностью действия от 50 до 100 км.
2. В состав оборудования должны входить:
антенно-фидерное устройство;
приемопередающее оборудование;
аппаратура обработки;
система дистанционного управления и контроля;
система отопления и кондиционирования;
дистанционный терминал;
средства сопряжения с каналами передачи информации;
система точного времени для синхронизации информации;
устройство документирования информации о воздушной обстановке;
источник бесперебойного питания;
комплект ЗИП;
комплект эксплуатационной документации.
3. Тактико-технические требования:
3.1 ОРЛ-А (первичный), используя метод, основанный на излучении радиоволн и регистрации их отражений от объектов, должен обеспечивать обнаружение и определение координат местоположения ВС в воздушном пространстве района аэродрома.
3.2 ОРЛ-А должен работать в L-диапазоне (1215 - 1350 МГц) или в S-диапазоне волн (2,7 - 3,9 ГГц).
3.3. Зона действия ОРЛ-А при нулевых углах закрытия, вероятности обнаружения не хуже 0,9 для ВС с эффективной отражающей поверхностью 5 м2 и вероятности ложных тревог по собственным шумам приемника не более 10 -6 определяется следующими параметрами:
угол обзора в горизонтальной плоскости 360°;
минимальный угол места не более 0,5°;
максимальный угол места не менее 45°;
минимальная дальность не более 1,0 км (на высотах до 1 км);
максимальная дальность в соответствии с 1.1;
максимальная высота 6000 м.
3.4. Период обновления радиолокационной информации должен быть не более 5 с.
3.5. Точностные характеристики ОРЛ-А должны быть не хуже:
по дальности 120 м (СКО после цифровой обработки информации);
по азимуту 0,15° (СКО после цифровой обработки информации).
3.6. Разрешающая способность ОРЛ-А должна быть не хуже:
по дальности 230 м или 1% расстояния до цели (выбирают большую величину);
по азимуту 3,5°.
3.7. Среднее количество ложных отметок за оборот от всех видов непреднамеренных помех не должно превышать 10. Среднее количество ложных отметок за обзор от всех видов непреднамеренных помех на выходе ОРЛ-А после цифровой обработки не должно превышать 10..
3.8. Аппаратура управления должна обеспечивать дистанционное и местное управление работой ОРЛ-А.
3.9. В ОРЛ-А должны постоянно контролироваться его основные тактико-технические характеристики и должна осуществляться автоматическая регистрация радиолокационной информации о воздушной обстановке, выдаваемой в центры (пункты) обслуживания воздушного движения.
3.10. Передача сообщений о ВС должна производиться в формате ASTERIX cat. 034 и cat. 048 или их последующих модификаций.
3.11. Средний ресурс должен составлять не менее 100 000 ч.
3.12. Средний срок службы должен составлять не менее 15 лет.
3.13. Средняя наработка на отказ должна составлять не менее 10 000 ч.
3.14. Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ N 4
к Правилам (п. 8.2)
Требования к вторичному радиолокатору с режимами А/С, S, УВД и ГРЛО (IV и VI) (ВРЛ)
В состав оборудования ВРЛ должны входить:
антенно-фидерные устройства;
передатчик;
приемник;
аппаратура обработки;
система дистанционного управления и контроля;
средства передачи информации;
система отопления и кондиционирования;
система точного времени для синхронизации информации;
устройство документирования информации о воздушной обстановке;
источники бесперебойного питания;
контрольный ответчик;
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования
2.1 ВРЛ должен обеспечивать:
а) передачу запроса приемоответчикам ВС, находящимся в зоне видимости ВРЛ, для получения ответов от них с использованием следующих режимов:
режим A: для опознавания и наблюдения;
режим C: для автоматической передачи данных о барометрической высоте и наблюдения;
общий вызов в режимах A/C: для получения ответов от приемоответчиков, работающих в режимах A/C, с целью наблюдения;
режим S:
общий вызов только в режиме S: для получения ответов от приемоответчиков, работающих в режиме S, с целью выделения этих ответчиков,
избирательная передача: для наблюдения за отдельными приемоответчиками, работающими в режиме S, и установления с ними связи;
б) прием и обработку дополнительной информации от ВС, оборудованных ответчиками, работающими в режимах A/C/S, (стандартное наблюдение ELS и расширенное наблюдение EHS).
2.2 Период обновления радиолокационной информации ВРЛ должен составлять при обеспечении полетов:
в аэродромной зоне - не более 5 с;
на трассах и вне их - не более 10 с.
2.3 Зона действия ВРЛ при нулевых и отрицательных углах закрытия, вероятности обнаружения ВС в режимах A/C/S не менее 0,98 определяется следующими параметрами:
а) угол обзора в горизонтальной плоскости 360°;
б) минимальный угол места не более 0,5°;
в) максимальный угол места не менее 45°;
г) максимальная высота при обеспечении полетов:
в аэродромной зоне - не менее 6000 м;
на трассах и вне их - не менее 20 000 м.
д) минимальная дальность не более 1 км;
е) максимальная дальность при обеспечении полетов:
в аэродромной зоне - не менее 160 км;
на трассах и вне их - не менее 400 км.
2.4 В передатчике ВРЛ должна быть предусмотрена регулировка излучаемой мощности с целью уменьшения дальности действия.
2.5 Точность измерения координат ВС (СКО) без учета погрешности ответчика на выходе аппаратуры обработки информации ВРЛ в режимах A/C и S должна быть не хуже:
по дальности 70 м;
по азимуту 4,8′.
2.6 Разрешающая способность ВРЛ после цифровой обработки (при вероятности обнаружения двух ВС не менее 0,98) в режимах A/C должна быть не хуже:
а) зона 1: разность азимутов 0,67° - 4,60°, разность дальностей менее 3,6 км:
вероятность обнаружения - более 0,98;
вероятность получения достоверной дополнительной информации - более 0,98;
б) зона 2: разность азимутов менее 0,67°, разность дальностей от 90 м до 3,6 км:
вероятность обнаружения - более 0,98;
вероятность получения достоверной дополнительной информации - более 0,90;
в) зона 3: разность азимутов менее 0,67°, разность дальностей не более 90 м:
вероятность обнаружения - более 0,60;
вероятность получения достоверной дополнительной информации - более 0,30.
2.7 Вероятность получения дополнительной информации при нахождении одного ВС в основном лепестке диаграммы направленности антенны и при отсутствии мешающих запросных сигналов должна быть не менее 0,98.
2.8 ВРЛ не должен задерживать информацию при ее обработке более чем на время, соответствующее 60° обзора радиолокатора. Допускается большая временная задержка для 5% ВС, находящихся в ближней зоне (20 км), и для 0,5% ВС - в дальней зоне (более 20 км).
2.9 Передача сообщений о ВС должна производиться в формате ASTERIX cat. 034 и cat. 048 или их последующих модификаций.
2.10 Средний ресурс должен составлять не менее 100 000 часов.
2.11 Средний срок службы должен составлять не менее 15 лет.
2.12 Средняя наработка на отказ должна составлять не менее 10 000 ч.
2.13 Среднее время восстановления должно быть не более 30 мин.
2.14 Требования к режимам и форматам сигналов.
2.14.1. Требования к режимам А/С
2.14.1.1 Несущие частоты сигналов запроса и управления подавлением по запросу должны быть (1030 +/- 0,1) МГц.
2.14.1.2 Несущие частоты импульса подавления и сигнала каждого запроса не должны отличаться друг от друга более чем на 0,2 МГц.
2.14.1.3 ВРЛ должен принимать сигналы ответа на частотах (1090 +/- 3) МГц.
2.14.1.4 Поляризация сигналов запроса и управления подавлением должна быть вертикальной.
2.14.1.5 ВРЛ должен принимать сигналы ответа режимов A/C с вертикальной поляризацией.
2.14.1.6 Сигнал запроса должен состоять из двух основных импульсов P1 и P3 и импульса управления подавлением P2, передаваемого вслед за первым импульсом P1.
2.14.1.7 Интервал между импульсами P1 и P3 должен соответствовать:
(8 +/- 0,2) мкс для режима A;
(21 +/- 0,2) мкс для режима C.
2.14.1.7.1 Интервал между импульсами P1 и P2 должен составлять (2,00 +/- 0,15) мкс.
2.14.1.7.2 Длительность импульсов P1, P2 и P3, измеренная на уровне 0,5 от амплитуды на фронте и спаде импульсов, должна быть равна (0,8 +/- 0,1) мкс.
2.14.1.7.3 Время нарастания импульсов P1, P2 и P3 должно находиться в пределах от 0,05 до 0,1 мкс.
2.14.1.7.4 Время спада импульсов P1, P2 и P3 должно находиться в пределах от 0,05 до 0,2 мкс.
2.14.1.7.5 Амплитуда излучаемого импульса P2 в антенне должна:
быть равна или больше амплитуды излучаемого импульса P1 в пределах боковых лепестков антенны, излучающей импульс P1;
находиться на уровне, который более чем на 9 дБ ниже амплитуды излучаемого импульса P1 в пределах желаемого сектора запроса.
2.14.1.8 В пределах желаемой ширины луча направленного запроса (главный лепесток) амплитуда излучаемого импульса P3 должна отличаться от амплитуды излучаемого импульса P1 не более чем на 1 дБ.
2.14.1.9 ВРЛ должен обеспечивать прием и обработку ответных сигналов приемоответчика, имеющих следующие характеристики
2.14.1.9.1 Функция ответа обеспечивается путем передачи сигнала, состоящего из двух координатных импульсов с интервалом 20,3 мкс, в качестве самого элементарного кода.
2.14.1.9.2 Информационные импульсы имеют интервалы с приращением 1,45 мкс начиная с первого координатного импульса.
2.14.1.9.3 Помимо информационных импульсов излучается специальный импульс индикации положения (SPI), однако это происходит только в результате выбора вручную (пилотом). При передаче этот импульс следует с интервалом 4,35 мкс за последним координатным импульсом только ответов в режиме A.
2.14.1.9.4 Все ответные импульсы имеют длительность (0,45 +/- 0,1) мкс, время нарастания от 0,05 до 0,1 мкс и время спада от 0,05 до 0,2 мкс. Изменение амплитуды одного импульса по отношению к любому другому в серии ответных импульсов не превышает 1 дБ.
2.14.1.9.5 Допуск на интервал между импульсами для каждого импульса (включая последний координатный импульс) по отношению к первому координатному импульсу группы составляет +/- 0,10 мкс. Допуск на интервал между импульсами для специальных импульсов индикации положения по отношению к последующему координатному импульсу группы ответа составляет +/- 0,10 мкс. Допуск на интервал между импульсами для любого импульса группы ответа по отношению к любому другому импульсу (за исключением первого координатного импульса) не превышает +/- 0,15 мкс.
2.14.1.9.6 Кодовое обозначение состоит из цифр от 0 до 7 включительно и из суммы подстрочных индексов номеров импульсов.
2.14.1.10 Максимальная частота повторения сигналов запроса должна быть не более 450 Гц.
2.14.1.10.1 Эффективная излучаемая мощность запросчика не должна превышать необходимую для обеспечения зоны действия ВРЛ.
2.14.1.10.2 Ширина азимутального луча направленной антенны запросчика (с механическим сканированием), излучающей импульсы P1, P3, должна быть достаточно узкой, обычно до 3° на уровне 3 дБ. Излучение боковых и задних лепестков направленной антенны должно быть не менее чем на 24 дБ ниже пикового значения излучения основного лепестка.
2.14.1.10.3 Излучение незатухающих колебаний не должно превышать 76 дБ ниже уровня 1 Вт.
2.14.1.10.4 Чувствительность приемника ВРЛ к сигналам, находящимся за пределами полосы пропускания, должна быть ниже нормальной чувствительности не менее чем на 60 дБ.
2.14.2. Требования к режиму S
2.14.2.1 Несущая частота всех запросов (передач по линии связи "вверх") от наземных станций с режимом S должна составлять (1030 +/- 0,01) МГц.
2.14.2.2 Для передач сигналов запроса и управления подавлением должна использоваться вертикальная поляризация.
2.14.2.3 Для запросов в режиме S несущая частота должна быть импульсно-модулированной. Кроме того, импульс P6 должен иметь внутреннюю фазовую модуляцию.
2.14.2.4 Запрос в режиме S должен состоять из трех импульсов P1, P2 и P6.
2.14.2.4.1 Импульс P5 должен использоваться в запросах общего вызова только в режиме S для предотвращения ответов воздушных судов, облучаемых боковыми и задними лепестками диаграммы направленности антенны.
2.14.2.4.2 Первое опрокидывание фазы в импульсе P6 должно являться синхронным опрокидыванием фазы.
2.14.2.4.3 Опрокидывание фазы при передаче данных должно быть только в момент времени, равный N·0,25 +/- 0,02 мкс (N равно или больше 2) после синхронного опрокидывания фазы. Импульс P6 длительностью 16,25 мкс должен содержать не больше 56 опрокидываний фазы данных. Импульс P6 длительностью 30,25 мкс должен содержать не более 112 опрокидываний фазы при передаче данных. За самым последним чипом данных, то есть за временным интервалом 0,25 мкс, следующим за последним опрокидыванием фазы при передаче данных, должен следовать защитный интервал длительностью 0,5 мкс.
2.14.2.4.4 Интервал между передними фронтами импульсов P1 и P2 должен составлять (2 +/- 0,05) мкс. Интервал между передним фронтом импульса P2 и синхронным опрокидыванием фазы P6 должен составлять (2,75 +/- 0,05) мкс. Передний фронт импульса P6 должен начинаться за (1,25 +/- 0,05) мкс до синхронного опрокидывания фазы. Если передается импульс P5, то он должен располагаться симметрично относительно синхронного опрокидывания фазы; передний фронт импульса P5 начинается за (0,4 +/- 0,1) мкс до синхронного опрокидывания фазы.
2.14.2.4.5 Амплитуда излучаемого импульса P2 и амплитуда импульса P6 в течение первой микросекунды должны быть больше, чем амплитуда излучаемого импульса P1 минус 0,25 дБ. За исключением быстротечных изменений амплитуды, связанных с опрокидыванием фазы, амплитуда P6 изменяется менее чем на 1 дБ, а изменение амплитуды между следующими друг за другом чипами данных в импульсе P6 составляет менее 0,25 дБ. Амплитуда излучаемого импульса P5 на антенне приемоответчика:
равна или больше амплитуды излучаемого импульса P6 в пределах боковых лепестков антенны, излучающей импульс P6;
более чем на 9 дБ ниже амплитуды излучаемого импульса P6 в пределах желаемого сектора запроса.
2.14.2.5 ВРЛ должен обеспечивать прием и обработку ответных сигналов приемоответчиков с режимом S на частоте (1090 +/- 3) МГц, имеющих следующие характеристики:
2.14.2.5.1 Для передачи ответа используется вертикальная поляризация.
2.14.2.5.2 Ответ состоит из преамбулы и блока данных. Преамбула представляет собой последовательность из четырех импульсов, а блок данных - последовательность с двоичной фазово-импульсной модуляцией с частотой изменения данных 1 Мбит/с.
2.14.2.5.3 Блок данных в ответах в режиме S состоит либо из 56, либо из 112 информационных бит.
2.14.2.5.4 Все импульсы ответа начинаются через определенный интервал, кратный 0,5 мкс, от первого передаваемого импульса. Допуск на положение импульса во всех случаях составляет 0,05 мкс.
2.14.2.5.5 Преамбула состоит из четырех импульсов, длительность каждого из которых составляет 0,5 мкс. Интервалы между первым передаваемым импульсом и вторым, третьим и четвертым импульсами составляют соответственно 1, 3,5 и 4,5 мкс.
2.14.2.5.6 Блок импульсов данных ответа начинается спустя 8 мкс после переднего фронта первого передаваемого импульса. Для каждой передачи назначаются интервалы в 56 или 112 одномикросекундных бит. Импульс длительностью 0,5 мкс передается либо в первой, либо во второй половине каждого интервала. Если за импульсом, передаваемым во второй половине первого интервала, следует другой импульс, передаваемый в первой половине следующего интервала, то эти два импульса сливаются и передается импульс длительностью 1 мкс.
2.14.2.5.7 Амплитуды первого импульса и любого другого импульса в ответе в режиме S отличаются не более чем на 2 дБ.
2.14.2.6 Кодирование данных, передаваемых в режиме S
2.14.2.6.1 Блок данных запроса должен состоять из последовательности, включающей 56 или 112 чипов данных, расположенных после опрокидываний фазы данных в пределах импульса P6 (1.14.2.6.3). Изменение фазы несущей на 180°, предшествующее чипу данных, обозначает, что этот чип данных соответствует двоичной 1. Отсутствие опрокидывания фазы рассматривается как двоичный 0.
2.14.2.6.2 Блок данных ответа должен состоять из 56 или 112 бит данных, которые формируются с помощью двоичной фазово-импульсной модуляции, кодирующей данные ответа. Импульс, передаваемый в первой половине интервала, представляет собой двоичную 1, а импульс, передаваемый во второй половине, представляет собой двоичный 0.
2.14.2.6.3 Биты должны нумероваться в порядке их передачи начиная с первого бита. Если не предусмотрен другой вариант, цифровые значения, кодированные по группам (полям) битов, кодируются с помощью положительной двоичной системы, и первым передаваемым битом является самый старший бит (MSB). Информация кодируется в полях, каждое из которых должно состоять по крайней мере из одного бита.
2.14.2.7 Приемопередачи при запросах общего вызова в режиме S
2.14.2.7.1 Приемопередачи при общем вызове только в режиме S
2.14.2.7.1.1 Запрос общего вызова только в режиме S, формат 11 сигнала по линии связи "вверх":
Формат данного запроса должен состоять из следующих полей:
UF - формат сигнала по линии связи "вверх";
PR - вероятность ответа.
IC - код запросчика;
CL - обозначение кода;
пустое - 16 бит свободны;
AP - адрес/четность.
2.14.2.7.1.1.1 PR: вероятность ответа. Данное 4-битное (6 - 9) поле сигнала, передаваемого по линии связи "вверх", должно содержать команды приемоответчику, указывающие вероятность ответа на данный запрос следующие коды:
0 означает передать ответ с вероятностью 1;
1 означает передать ответ с вероятностью 1/2;
2 означает передать ответ с вероятностью 1/4;
3 означает передать ответ с вероятностью 1/8;
4 означает передать ответ с вероятностью 1/16;
5, 6, 7 не назначены;
8 означает игнорировать блокировку, передать ответ с вероятностью 1;
9 означает игнорировать блокировку, передать ответ с вероятностью 1/2;
10 означает игнорировать блокировку, передать ответ с вероятностью 1/4;
11 означает игнорировать блокировку, передать ответ с вероятностью 1/8;
12 означает игнорировать блокировку, передать ответ с вероятностью 1/16;
13, 14, 15 не назначены.
2.14.2.7.1.1.2 IC: код запросчика. Данное 4-битное (10 - 13) поле сигнала, передаваемого по линии связи "вверх", должно содержать либо 4-битный код идентификатора запросчика, либо младшие 4 бит 6-битного кода идентификатора наблюдения в зависимости от значения поля CL.
При работе ВРЛ рекомендуется использовать один код запросчика.
Запросчик не должен чередовать запросы общего вызова в режиме S, использующие различные коды запросчика:
II: идентификатор запросчика. Данное 4-битное значение определяет код идентификатора запросчика (II). Коды II должны назначаться запросчикам в диапазоне от 0 до 15. Значение кода II, равное 0, используется только для дополнительного обнаружения при обнаружении на основе отмены блокировки. В том случае, когда два кода II назначены только одному запросчику, один код II используется для целей линии передачи данных в целом;
SI: идентификатор наблюдения. Данное 6-битное значение должно определять код идентификатора наблюдения (SI). Коды SI назначаются запросчикам в диапазоне от 1 до 63. Значение кода SI, равное 0, не используется. Коды SI используются с протоколами блокировки в условиях работы группы станций.
CL: обозначение кода. Данное 3-битное поле сигнала, передаваемого по линии связи "вверх", должно определять содержание поля IC.
Кодирование (двоичное):
000 означает, что поле IC содержит код II;
001 означает, что поле IC содержит коды SI 1 - 15;
010 означает, что поле IC содержит коды SI 16 - 31;
011 означает, что поле IC содержит коды SI 32 - 47;
100 означает, что поле IC содержит коды SI 48 - 63.
Другие значения поля CL не используются.
Сообщение о возможности использования кода идентификатора наблюдения (SI). Приемоответчики, которые обрабатывают коды SI, сообщают об этой возможности посредством установки бита 35 на 1 в поле MB сообщения о возможности использования линии передачи данных .
2.14.2.7.1.1.3 Функционирование при использовании отмены блокировки.
Максимальная частота запросов общего вызова только в режиме S, производимая запросчиком, использующим опознавание на основе отмены блокировки, должна зависеть от вероятности ответа следующим образом:
а) при вероятности ответа, равной 1,0: три запроса на интервал облучения 3 дБ или 30 запросов в секунду, в зависимости от того, какое значение является меньшим;
б) при вероятности ответа, равной 0,5: пять запросов на интервал облучения 3 дБ или 60 запросов в секунду, в зависимости от того, какое значение является меньшим;
в) при вероятности ответа, равной 0,25 или менее: 10 запросов на интервал облучения 3 дБ или 125 запросов в секунду, в зависимости от того, какое значение является меньшим.
Содержимое полей избирательно адресованного запроса, используемого запросчиком без присвоенного кода запросчика. Запросчик, которому не присвоен индивидуальный дискретный код запросчика, но которому разрешено вести передачи, должен использовать код II, равный 0, для осуществления избирательных запросов. В этом случае содержимое полей избирательно адресованных запросов, используемых при обнаружении на основе отмены блокировки, сводится к следующему:
UF = 4, 5, 20 или 21;
PC = 0;
RR /= 16, если RRS = 0;
DI = 7;
IIS = 0;
LOS = 0, кроме оговоренных в 1.14.2.11.1.1.4 случаев;
TMS = 0.
2.14.2.7.1.1.4 Дополнительное обнаружение с использованием кода II, равного 0.
В том случае, когда для дополнительного обнаружения используется блокировка с помощью кода II, равного 0, рекомендуется, чтобы все воздушные суда в пределах интервала облучения, в котором ведется обнаружение воздушного судна, получали команду на блокировку с использованием кода II, равного 0, а не только воздушные суда, находящиеся в зоне искажения.
Запросчики, применяющие дополнительное обнаружение с использованием кода II, равного 0, должны осуществлять обнаружение путем передачи команды на блокировку в течение не более двух последовательных сканирований каждому из уже обнаруженных воздушных судов в интервале облучения, содержащем зону искажения, и не повторяют ее до истечения 48 с.
2.14.2.7.1.2 ВРЛ должен принимать ответ на запрос общего вызова, формат 11 сигнала по линии связи "вниз".
Ответ на запрос общего вызова только в режиме S или на запрос общего вызова в режиме A/C/S является ответом на запрос общего вызова в режиме S с форматом 11 сигнала по линии связи "вниз". Формат данного ответа состоит из следующих полей:
DF - формат сигнала по линии связи "вниз";
CA - возможности;
AA - объявленный адрес;
PI - четность/идентификатор запросчика.
2.14.2.7.1.2.1 CA: возможности. Данное 3-битное (6 - 8) поле сигнала, передаваемого по линии связи "вниз", доставляет информацию об уровне приемоответчика, указанную ниже дополнительную информацию и используется в форматах DF = 11 и DF = 17.
Кодирование:
0 означает приемоответчик уровня 1 (только наблюдение) и отсутствие возможности установления кода 7 CA, воздушное судно находится в воздухе или на земле;
1 зарезервировано;
2 зарезервировано;
3 зарезервировано;
4 означает приемоответчик уровня 2 или выше и возможность установления кода 7 CA, воздушное судно находится на земле;
5 означает приемоответчик уровня 2 или выше и возможность установления кода 7 CA, воздушное судно находится в воздухе;
6 означает приемоответчик уровня 2 или выше и возможность установления кода 7 CA, воздушное судно находится в воздухе или на земле;
7 означает, что поле DR /= 0 или поле FS = 2, 3, 4 или 5, воздушное судно находится в воздухе или на земле.
В тех случаях, когда условия для кода 7 CA не выполняются, воздушные суда с приемоответчиками уровня 2 или выше:
а) не имеющие средств автоматической установки условия "воздушное судно на земле" используют код 6 CA;
б) имеющие средства автоматического определения условия "воздушное судно на земле" используют код 4 CA на земле и 5 CA - в воздухе;
в) имеющие или не имеющие средства автоматического определения состояния "воздушное судно на земле", используют код CA = 4 при получении команды установить состояние "воздушное судно на земле" и сообщить о нем через подполе TCS .
Сообщения о возможности использования линии передачи данных передаются бортовым оборудованием, установившим коды 4, 5, 6 или 7 CA.
2.14.2.7.1.2.2 AA: объявленный адрес. Данное 24-битное (9 - 32) поле сигнала, передаваемого по линии связи "вниз", содержит адрес воздушного судна, который обеспечивает однозначное опознавание воздушного судна.
2.14.2.7.1.3 Протокол блокировки. После выделения адреса воздушного судна в отношении этого конкретного воздушного судна запросчик использует протокол блокировки общего вызова, определенный в 1.14.2.12.9, при условии, что:
запросчик использует код IC, который отличается от нуля, и
воздушное судно находится в зоне, где запросчику разрешено использовать блокировку.
2.14.2.7.1.4 Протокол стохастического общего вызова. При получении общего вызова только в режиме S с кодом PR, равным 1 - 4 или 9 - 12, приемоответчик осуществляет передачу ответов по произвольному закону. Решение об ответе принимается в соответствии с коэффициентом вероятности, указанным в запросе. Приемоответчик не отвечает, если принимается код PR, равный 5, 6, 7, 13, 14 или 15.
2.14.2.8 Приемопередачи в режиме адресного наблюдения и приемопередачи сообщений стандартной длины
2.14.2.8.1 Наблюдение, запрос данных о высоте, формат 4 сигнала по линии связи "вверх":
Формат данного запроса должен состоять из следующих полей:
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
AP - адрес/четность.
2.14.2.8.1.1 PC: протокол. Данное 3-битное (6 - 8) поле сигнала, передаваемого по линии связи "вверх", должно содержать рабочие команды приемоответчику. Поле PC игнорируется при обработке запросов в режиме наблюдения или Comm-A, содержащих DI = 3.
Кодирование:
0 означает, что никаких действий не требуется;
1 означает неселективную блокировку общего вызова;
2 не назначено;
3 не назначено;
4 означает команду закончить Comm-B;
5 означает команду закончить ELM, передаваемый по линии связи "вверх";
6 означает команду закончить ELM, передаваемый по линии связи "вниз";
7 не назначено.
2.14.2.8.1.2 RR: запрос ответа. Данное 5-битное (9 - 13) поле сигнала, передаваемого по линии связи "вверх", должно определять длину и содержание запрошенного ответа. Если самым старшим битом (MSB) кода RR является 1 (RR равно или более 16), последние 4 бита 5-битного кода RR, преобразованные в свой десятичный эквивалент, означают коды BDS1 запрашиваемого сообщения Comm-B.
Кодирование:
RR 0 - 15 используется для запроса ответа с форматом наблюдения (DF = 4 или 5);
RR 16 - 31 используется для запроса ответа с форматом Comm-B (DF = 20 или 21);
RR 16 используется для запроса передачи инициируемого бортом сообщения Comm-B;
RR 17 используется для запроса сообщения о возможностях линии передачи данных, как предусмотрено в 1.14.2.12.10.2.2;
RR 18 используется для запроса опознавательного индекса воздушного судна, как предусмотрено в 1.14.2.12.9;
19 - 31 не назначаются.
2.14.2.8.1.3 DI: опознавание указателя. Данное 3-битное (14 - 16) поле сигнала, передаваемого по линии связи "вверх", должно определять структуру поля SD.
Кодирование:
0 означает, что SD не назначено, за исключением подполя IIS;
1 означает, что SD содержит управляющую информацию для работы с группой станций и передачи сообщений;
2 означает, что SD содержит управляющие данные для расширенного сквиттера;
3 означает, что SD содержит информацию блокировки, радиовещательную информацию и управляющую информацию GICB для работы группы станций SI;
4 - 6 означает, что SD не назначено;
7 означает, что SD содержит запрос считывания расширенных данных и управляющую информацию для работы с группой станций и передачи сообщений.
2.14.2.8.1.4 SD: специальный указатель. Данное 16-битное (17 - 32) поле сигнала, передаваемого по линии связи "вверх", должно содержать управляющие коды, которые зависят от кода, содержащегося в поле DI.
2.14.2.8.1.4.1 Подполя поля SD. Поле SD должно содержать следующую информацию:
а) Если код DI = 0,1 или 7:
IIS: данное 4-битное (17 - 20) подполе идентификатора запросчика содержит назначенный код идентификатора запросчика;
б) Если код DI = 0:
биты 21 - 32 не назначены;
в) Если код DI = 1:
MBS: данное 2-битное (21, 22) подполе Comm-B для группы станций имеет следующие коды:
0 означает, что никаких действий, связанных с Comm-B, не требуется;
1 означает запрос о резервировании инициируемого бортом Comm-B;
2 означает окончание Comm-B;
3 не назначено.
MES: данное 3-битное (23 - 25) подполе ELM для группы станций содержит команды резервирования и окончания для ELM в следующем виде:
0 означает, что никаких действий, связанных с ELM, не требуется;
1 означает запрос о резервировании приема ELM по линии связи "вверх";
2 означает окончание ELM, передаваемого по линии связи "вверх";
3 означает запрос о резервировании передачи ELM по линии связи "вниз";
4 означает окончание ELM, передаваемого по линии связи "вниз";
5 означает запрос о резервировании приема ELM по линии связи "вверх" и окончание ELM, передаваемого по линии связи "вниз";
6 означает окончание ELM, передаваемого по линии связи "вверх", и запрос о резервировании передачи ELM по линии связи "вниз";
7 означает окончание ELM, передаваемого по линии связи "вверх", и ELM, передаваемого по линии связи "вниз".
RSS: данное 2-битное (27, 28) подполе состояния резервирования содержит команду приемоответчику передать в поле UM информацию о состоянии резервирования. Назначены следующие коды:
0 означает отсутствие запроса;
1 означает команду передать в поле UM информацию о состоянии резервирования Comm-B;
2 означает команду передать в поле UM информацию о состоянии резервирования приема ELM по линии связи "вверх";
3 означает команду передать в поле UM информацию о состоянии резервирования передачи ELM по линии связи "вниз";
г) Если код DI = 1 или 7:
LOS: данное 1-битное (26) подполе блокировки при установке на 1 означает команду о блокировке группы станций от запросчика, указанного в IIS. Установка LOS на 0 используется для обозначения того, что никакого изменения состояния блокировки не требуется;
TMS: данное 4-битное (29 - 32) подполе тактического сообщения содержит управляющую информацию для передачи сообщений, используемую бортовым электронным оборудованием линии передачи данных;
д) Если код DI = 7:
RSS: данное 4-битное (21 - 24) подполе запроса ответа в SD сообщает код BDS2 запрашиваемого ответа Comm-B. Биты 25, 27 и 28 не назначены;
е) Если код DI = 2:
TCS: данное 3-битное (21 - 23) подполе управления типом в SD управляет состоянием "воздушное судно на земле", о котором сообщает приемоответчик. Назначены следующие коды:
0 означает отсутствие команды относительно состояния "воздушное судно на земле";
1 означает команду на установку состояния "воздушное судно на земле" и передачу сообщения о нем в течение следующих 15 с;
2 означает команду на установку состояния "воздушное судно на земле" и передачу сообщения о нем в течение следующих 60 с;
3 означает аннулирование команды относительно состояния "воздушное судно на земле";
4 - 7 не назначены.
Приемоответчик способен принимать новую команду на установку или аннулирование состояния "воздушное судно на земле", даже если время действия предыдущей команды еще не истекло.
RCS: данное 3-битное (24 - 26) подполе управления частотой передачи в SD управляет частотой передачи приемоответчиком сквиттера в формате "местонахождение воздушного судна на земле". Это подполе не оказывает влияния на частоту передачи приемоответчиком сквиттера в формате "местонахождение воздушного судна в воздухе". Назначены следующие коды:
0 означает отсутствие команды относительно частоты передачи расширенного сквиттера местонахождения воздушного судна на земле;
1 означает команду передавать расширенный сквиттер местонахождения воздушного судна на земле с высокой частотой в течение 60 с;
2 означает команду передавать расширенный сквиттер местонахождения воздушного судна на земле с низкой частотой в течение 60 с;
3 означает команду подавлять все более длительные сквиттеры местонахождения воздушного судна на земле в течение 60 с;
4 означает команду подавлять все более длительные сквиттеры местонахождения воздушного судна на земле в течение 120 с;
5 - 7 не назначены.
SAS: данное 2-битное (27 - 28) подполе наземной антенны в SD управляет выбором разнесенных антенн приемоответчиков, которые используются для передачи приемоответчиком расширенного сквиттера в формате "местонахождение воздушного судна на земле" и передачи сквиттера обнаружения, когда приемоответчик сообщает о нахождении воздушного судна на земле. Это подполе не оказывает влияния на выбор приемоответчиком разнесенных антенн при передаче типа сообщения "местонахождение воздушного судна в воздухе". Назначены следующие коды:
0 означает отсутствие команды относительно антенны;
1 означает команду использовать поочередно верхнюю и нижнюю антенны в течение 120 с;
2 означает команду использовать нижнюю антенну в течение 120 с;
3 означает команду перейти в режим по умолчанию.
ж) Если код DI = 3:
SIS: 6-битное (17 - 22) подполе идентификатора наблюдения в SD содержит присвоенный запросчику код идентификатора наблюдения.
LSS: 1-битное (23) подполе наблюдения в режиме блокировки при установке на 1 означает команду блокировки в условиях работы группы станций от запросчика, указанного в SIS. При установке на 0 LSS означает отсутствие команды на изменение состояния блокировки.
RRS: 4-битное (24 - 27) подполе запроса ответа в SD содержит код BDS2 запрашиваемого регистра GICB. Биты 28 - 32 не назначены.
2.14.2.8.1.4.2 Обработка полей PC и SD. Если код DI = 1, обработка поля PC должна завершаться до обработки поля SD.
2.14.2.8.2 Запрос данных о высоте с использованием сообщений Comm-A, формат 20 сигнала по линии связи "вверх":
Формат данного запроса должен состоять из следующих полей:
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
MA - сообщение, Comm-A;
AP - адрес/четность.
2.14.2.8.2.1 MA: сообщение, Comm-A. Данное 56-битное (33 - 88) поле должно содержать сообщение по линии передачи данных для воздушного судна.
2.14.2.8.3 Запрос опознавания в режиме наблюдения, формат 5 сигнала по линии связи "вверх":
Формат данного запроса должен состоять из следующих полей:
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
AP - адрес/четность;
2.14.2.8.4 Запрос опознавания с использованием сообщения Comm-A, формат 21 сигнала по линии связи "вверх":
Формат данного запроса состоит из следующих полей:
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
MA - сообщение, Comm-A;
AP - адрес/четность.
2.14.2.8.5 Ответ с данными о высоте в режиме наблюдения, формат 4 сигнала по линии связи "вниз":
Данный ответ направляется при получении запроса UF 4 или 20 со значением поля RR менее 16. Формат данного ответа состоит из следующих полей:
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
AC - код высоты;
AP - адрес/четность.
2.14.2.8.5.1 FS: полетный статус. Данное 3-битное (6 - 8) поле сигнала, передаваемого по линии связи "вниз", содержит следующую информацию:
Кодирование:
0 означает отсутствие тревожной сигнализации и SPI, воздушное судно находится в воздухе;
1 означает отсутствие тревожной сигнализации и SPI, воздушное судно находится на земле;
2 означает наличие тревожной сигнализации, отсутствие SPI, воздушное судно находится в воздухе;
3 означает наличие тревожной сигнализации, отсутствие SPI, воздушное судно находится на земле;
4 означает наличие тревожной сигнализации и SPI, воздушное судно находится в воздухе или на земле;
5 означает отсутствие тревожной сигнализации и наличие SPI, воздушное судно находится в воздухе или на земле;
6 зарезервировано;
7 не назначено.
2.14.2.8.5.2 DR: запрос по линии связи "вниз". Данное 5-битное (9 - 13) поле сигнала, передаваемого по линии связи "вниз", содержит запросы с целью передачи информации по линии связи "вниз".
Кодирование:
0 означает отсутствие запроса по линии связи "вниз";
1 означает запрос на передачу сообщения Comm-B;
2 зарезервировано для БСПС;
3 зарезервировано для БСПС;
4 означает наличие всенаправленного сообщения Comm-B 1;
5 означает наличие всенаправленного сообщения Comm-B 2;
6 зарезервировано для БСПС;
7 зарезервировано для БСПС;
8 - 15 Не назначены;
16 - 31 См. протокол передачи ELM по линии связи "вниз".
Коды 1 - 15 имеют преимущество перед кодами 16 - 31.
2.14.2.8.5.3 UM: служебное сообщение. Данное 6-битное (14 - 19) поле сигнала, передаваемого по линии связи "вниз", содержит информацию о статусе сообщений приемоответчика.
2.14.2.8.5.3.1 Подполя в UM для протоколов в условиях работы группы станций
Если запрос в режиме наблюдения или запрос Comm-A (UF равно 4, 5, 20, 21) содержит DI = 1 и RSS, отличное от 0, то в поле UM ответа приемоответчиком должны включаться следующие подполя:
IIS: данное 4-битное (14 - 17) подполе идентификатора запросчика должно содержать идентификатор запросчика, который резервируется для связи в условиях работы группы станций;
IDS: данное 2-битное (18, 19) подполе указателя идентификатора должно сообщать о типе резервирования, сделанного запросчиком, указанным в IIS.
Назначаются следующие коды:
0 означает отсутствие информации;
1 означает, что IIS содержит код II Comm-B;
2 означает, что IIS содержит код II Comm-C;
3 означает, что IIS содержит код II Comm-D.
2.14.2.8.5.3.2 Состояние резервирования в условиях работы группы станций. Если в запросе не оговаривается содержание UM (когда DI = 0 или 7 или когда DI = 1 и RSS = 0), то идентификатор запросчика ВРЛ, который в данный момент зарезервирован для доставки Comm-B в условиях работы группы станций, должен передаваться в подполе IIS вместе с кодом 1 в подполе IDS.
Если в запросе не оговаривается содержание UM и не имеется текущего резервирования Comm-B, то идентификатор запросчика ВРЛ, который в данный момент зарезервирован для приема ELM по линии связи "вниз", при наличии такого ELM должен передаваться в подполе IIS вместе с кодом 3 в подполе IDS.
2.14.2.8.5.4 AC: код высоты. Данное 13-битное (20 - 32) поле должно содержать данные о высоте, закодированные следующим образом:
а) бит 26 обозначается как бит M и равняется 0, если информация о высоте представляется в футах. M, равный 1, резервируется для указания того, что информация о высоте представляется в метрических единицах;
б) если M равен 0, бит 28 обозначается как бит Q. Q, равный 0, используется для указания того, что информация о высоте представляется с шагом квантования 100 фут. Q, равный 1, означает, что информация о высоте представляется с шагом квантования 25 фут;
в) если бит M (бит 26) и бит Q (бит 28) равны 0, то высота кодируется по типу ответов в режиме C. Начиная с бита 20, составляется следующая последовательность: C1, A1, C2, A2, C4, A4, 0, B1, 0, B2, D2, B4, D4;
г) если бит M равен 0 и бит Q равен 1, то 11-битное поле, составляемое битами 20 - 25, 27 и 29 - 32, представляет собой поле с двоичным кодированием, причем самый младший бит (LSB) равен 25 фут. Двоичное значение положительного целого десятичного N кодируется для представления информации о барометрической высоте в диапазоне [(25 N - 1,000) плюс или минус 12,5 фут]. Кодирование, предусмотренное в перечислении в) 1.14.2.12.5.4, используется для представления информации о барометрической высоте выше 50 187,5 фут.
д) если бит M равен 1, то 12-битное поле, представленное битами 20 - 25 и 27 - 31, резервируется для кодирования информации о высоте в метрических единицах;
е) если информация о высоте отсутствует или установлено, что данные о высоте являются недействительными, то в каждом из 13 битов поля AC передается 0.
2.14.2.8.6 Ответ с данными о высоте в сообщении Comm-B, формат 20 сигнала по линии связи "вниз".
Данный ответ передается при получении запроса UF 4 или 20 со значением поля RR более 15. Формат данного ответа состоит из следующих полей:
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
AC - код высоты;
MB - сообщение, Comm-B;
AP - адрес/четность.
2.14.2.8.6.1 MB: сообщение, Comm-B. Данное 56-битное (33 - 88) поле сигнала, передаваемого по линии связи "вниз", должно использоваться для передачи на землю сообщений по линии передачи данных.
2.14.2.8.7 Ответ опознавания в режиме наблюдения, формат 5 сигнала по линии передачи данных "вниз".
Данный ответ направляется при получении запроса UF 5 или 21 со значением поля RR менее 16. Формат данного ответа состоит из следующих полей:
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
ID - опознавание;
AP - адрес/четность.
2.14.2.8.7.1 ID: опознавание (код режима A). Данное 13-битное (20 - 32) поле содержит код опознавания воздушного судна, соответствующий схеме ответов в режиме A. Начиная с бита 20 составляется следующая последовательность: C1, A1, C2, A2, C4, A4, 0, B1, D1, B2, D2, B4, D4.
2.14.2.8.8 Ответ опознавания в сообщении Comm-B, формат 21 сигнала по линии "вниз".
Данный ответ направляется при получении запроса UF 5 или 21 со значением поля RR более 15. Формат данного ответа состоит из следующих полей:
DF - формат сигнала по линии связи "вниз";
FS - состояние полета;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
ID - опознавание:
MB - сообщение, Comm-B;
AP - адрес/четность.
2.14.2.8.9 Протоколы блокировки
2.14.2.8.9.1 Блокировка общего вызова в условиях работы группы станций
2.14.2.8.9.1.1 Команда блокировки в условиях работы группы станций должна передаваться в поле SD. Команда блокировки для кода II передается в SD при DI = 1 или DI = 7. Команда блокировки II должна отображаться с помощью кода LOS, равного 1, и наличием ненулевого идентификатора запросчика в подполе IIS поля SD. Команда блокировки для кода SI должна передаваться в SD при DI = 3. Блокировка SI должна отображаться с помощью кода LSS, равного 1, и наличием ненулевого идентификатора запросчика в подполе SIS поля SD. После того как приемоответчик признал запрос, содержащий команду блокировки для условий работы группы станций, данный приемоответчик должен блокировать (то есть не признавать) любые запросы общего вызова только в режиме S, которые содержат идентификатор запросчика, передавшего команду блокировки. Блокировка действует в течение интервала TL с момента последнего признания запроса, содержащего команду блокировки для условий работы группы станций. Блокировка в условиях работы группы станций не должна препятствовать признанию запроса общего вызова только в режиме S, содержащего коды PR с 8 по 12. Если команда блокировки (LOS = 1) получена вместе с IIS = 0, то она рассматривается как неизбирательная блокировка общего вызова.
2.14.2.8.9.1.2 Неизбирательная блокировка общего вызова
В тех случаях, когда нет необходимости в протоколе блокировки кодов II для условий работы группы станций (например, отсутствует перекрытие зоны действия или обеспечивается координация работы наземных станций с помощью средств связи "земля - земля"), может использоваться протокол неизбирательной блокировки. После получения запроса, содержащего код 1 в поле PC, приемоответчик должен блокировать (то есть не признавать) запросы общего вызова двух типов:
а) общий вызов только в режиме S (UF = 11) с II, равным 0;
б) общий вызов в режиме A/C/S, предусмотренный в 1.14.2.4.1.
Данное условие блокировки действует в течение интервала TD с момента последнего получения команды. Неизбирательная блокировка не должна препятствовать признанию запросов общего вызова только в режиме S, содержащих коды PR с 8 по 12.
2 Неизбирательная блокировка не должна влиять на реагирование приемоответчика на запросы общего вызова только в режиме S, содержащие II, не равный 0.
2.14.2.8.10 ВРЛ должен обеспечивать прием протоколов основных данных.
2.14.2.8.10.1 Протокол полетного статуса. Полетный статус сообщается в поле FS.
2.14.2.8.10.1.1 Тревожная сигнализация. В поле FS передается тревожная сигнализация, если пилот изменяет код опознавания в режиме A, передаваемый в ответах режима A и в форматах сигналов DF = 5 и DF = 21 по линии связи "вниз".
Постоянная тревожная сигнализация. Тревожная сигнализация сохраняется, если код опознавания в режиме A изменяется на 7500, 7600 или 7700.
Временная тревожная сигнализация. Тревожная сигнализация является временной и аннулируется спустя TC секунд, если код опознавания в режиме A изменяется на значение, отличное от 7500, 7600 или 7700. Интервал TC повторно инициируется и продолжается в течение TC секунд после того, как функция приемоответчика приняла какое-либо изменение.
Постоянная тревожная сигнализация прекращается и заменяется временной тревожной сигнализацией, если код опознавания в режиме A устанавливается на значение, отличное от 7500, 7600 или 7700.
2.14.2.8.10.1.2 Сообщение о нахождении на земле. Сообщение о том, что воздушное судно находится на земле, передается в поле CА, в поле FS и в поле VS. Если имеется сопряженное с приемоответчиком устройство автоматического формирования данных о нахождении воздушного судна на земле (например, по нагрузке на колеса или используя концевой выключатель), оно используется как основа для представления данных о состоянии "на земле". Если такое сопряженное с ответчиком устройство отсутствует, то коды FS и VS указывают, что воздушное судно находится в воздухе, а поле CA указывает, что воздушное судно находится либо в воздухе, либо на земле (CA = 6).
2.14.2.8.10.1.3 Специальная индикация положения (SPI). При работе в режиме ручного управления приемоответчики режима S передают в поле FS и в подполе статуса наблюдения (SSS) импульс, эквивалентный специальному импульсу индикации положения (SPI). Этот импульс передается в течение TL секунд с момента его генерации.
2.14.2.8.10.2 Протокол сообщения данных о возможностях. Структура данных и содержание регистров сообщений о возможности использования линии передачи данных реализуются таким образом, чтобы обеспечивалась интероперабельность:
2.14.2.8.10.2.1 Сообщение о возможностях. Данное трехбитовое поле CA (возможности), содержащееся в ответе на запрос общего вызова (DF = 11), сообщает об основных возможностях приемоответчика в режиме S.
2.14.2.8.10.2.2 Сообщение о возможности использования линии передачи данных. Сообщение о возможности использования линии передачи данных обеспечивает запросчика информацией о возможности оборудования с режимом S использовать линию передачи данных.
Извлечение сообщения о возможности использования линии передачи данных, содержащегося в регистре 1016. Данное сообщение принимается в виде инициированного землей ответа Comm-B на запрос, содержащий RR, равное 17, и DI, не равное 7, или DI, равное 7, и RRS, равное 0.
Сообщения о возможности использования линии передачи данных содержат информацию о возможностях, предоставляемую приемоответчиком, ADLP и блоком БСПС. В случае потери входных данных, предоставляемых внешними источниками, приемоответчик обнуляет соответствующие биты в сообщении, касающемся линии передачи данных.
Сообщение о возможности использования линии передачи данных содержит информацию, которая хранится в регистре 1016 приемоответчика.
Номер версии подсети режима S содержит информацию, обеспечивающую функциональную совместимость с бортовым оборудованием ранних выпусков.
Номер версии подсети режима S указывает на то, что все реализуемые функции подсети отвечают требованиям указанного номера версии. Номер версии подсети режима S устанавливается на значение, не равное 0, если установлены, по крайней мере, одно DTE или специальная услуга режима S.
2.14.2.8.10.2.3 Сообщение о возможности общего использования GICB. Информация об услугах GICB общего использования, которая активно обновляется, указывается в регистре 1716 приемоответчика.
2.14.2.8.11 Протоколы сообщений стандартной длины
Запросчик должен включать сообщение Comm-A в поле MA запроса UF = 20 или 21.
2.14.2.9 Частота повторения запроса. В запросчиках с режимом S при всех режимах запроса должны использоваться наименьшие практически возможные частоты запросов.
Частота повторения запроса общего вызова в режимах A/C/S, используемая для обнаружения, должна составлять менее 250 раз в секунду. Эта частота применяется также в случае спаренных запросов общего вызова только в режиме S и только в режимах A/C, используемых для обнаружения в условиях работы группы станций.
2.14.2.10 Запросы в режиме S, требующие ответа, должны передаваться единичному воздушному судну только с интервалом менее 400 мкс.
2.14.2.11 Частота передачи избирательных запросов
Для всех запросчиков режима S частота передачи избирательных запросов должна составлять:
а) менее 2400 раз в секунду с усреднением за период в 40 мс;
б) менее 480 раз в пределах любого сектора с усреднением за период в 1 с.
Кроме того, частота передачи избирательных запросов для запросчика режима S, зона действия которого перекрывает боковые лепестки любого другого запросчика режима S, должна составлять:
а) менее 1200 раз в секунду с усреднением за период в 4 с;
б) менее 1800 раз в секунду с усреднением за период в 1 с;
2.14.2.12 Выходная мощность запросчика в пассивном режиме
Когда передатчик запросчика не передает запрос, эффективная излучаемая мощность не должна превышать 5 дБмВт на любой частоте от 960 до 1215 МГц.
2.14.2.13 Излучение незатухающих колебаний не должно превышать 76 дБ ниже уровня 1 Вт.
2.14.2.14 Допуски на передаваемые сигналы. Для обеспечения того, чтобы сигнал в пространстве принимался приемоответчиком допуски на передаваемый сигнал соответствуют приведенным в таблице:
| Функция | Допуск |
|---|---|
| Длительность импульсов P1, P2, P3, P4, P5 | +/- 0,09 мкс |
| Длительность импульса P6 | +/- 0,20 мкс |
| Положение импульсов P1 - P3 | +/- 0,18 мкс |
| Положение импульсов P1 - P2 | +/- 0,10 мкс |
| Положение импульсов P3 - P4 | +/- 0,04 мкс |
| Положение импульсов P1 - P2 | +/- 0,04 мкс |
| Положение импульса P2 - синхронное опрокидывание фазы | +/- 0,04 мкс |
| Положение импульса P6 - синхронное опрокидывание фазы | +/- 0,04 мкс |
| Положение импульса P5 - синхронное опрокидывание фазы | +/- 0,05 мкс |
| Амплитуда импульса P3 | P1 +/- 0,05 дБ |
| Амплитуда импульса P4 | P3 +/- 0,05 дБ |
| Амплитуда импульса P6 | Равна или более P2 - 0,25 дБ |
| Время нарастания импульса | 0,05 мкс минимум, 0,1 мкс максимум |
| Время нарастания импульса | 0,05 мкс минимум, 0,2 мкс максимум |
2.14.2.15 Чувствительность к сигналам, находящимся за пределами полосы пропускания, должна быть по крайней мере на 60 дБ ниже нормальной чувствительности.
2.14.3 Требования к режиму УВД
2.14.3.1 ВРЛ должен обеспечивать обнаружение, определение координат (азимут-дальность), запрос и прием дополнительной информации от воздушных судов, оборудованных ответчиками, работающими с использованием следующих режимов:
а) режима ЗК1 с целью опознавания и наблюдения;
б) режима ЗК2 с целью автоматической передачи данных о барометрической высоте и наблюдения.
2.14.3.2 Разрешающая способность ВРЛ при вероятности обнаружения - более 0,98 должна быть не более:
по азимуту 3,5 градуса;
по дальности 400 м.
2.14.3.3 Несущие частоты сигналов запроса и подавления по запросу должны быть (1030 ±0,2) МГц.
2.14.3.4 Несущие частоты сигнала запроса и подавления не должны отличаться друг от друга более чем на 0,2 МГц.
2.14.3.5 ВРЛ должен принимать сигналы ответа на частоте (740 ±1,8) МГц.
2.14.3.6 Поляризация сигналов запроса и подавления на частоте 1030 МГц вертикальная. Поляризация сигналов ответа на частоте 740 МГц горизонтальная.
2.14.3.7 Сигнал запроса должен состоять из двух основных импульсов Р1 и Рз и импульса подавления Р2, передаваемого вслед за первым импульсом Р1.
2.14.3.8 Интервал между импульсами Р1 и Р3 для режимов ЗК1, ЗК2, ЗК3 должен быть (9,4± 0,2) мкс, (14,0± 0,2) мкс, (23,0± 0,2) мкс соответственно.
2.14.3.9 Интервал между импульсами Р1 и Р2 должен составлять (2,0 ±0,15) мкс.
2.14.3.10 Длительность импульсов Р1 Р2, и Рз, измеренная на уровне 0,5 от амплитуды на фронте и спаде импульсов, должна быть равна (0,8 ± 0,1) мкс.
2.14.3.11 Время нарастания импульсов Р1, Р2 и Р3 должно находиться в пределах (0,05 - 0,1) мкс.
2.14.3.12 Время спада импульсов Р1, Р2 и Р3 должно находиться в пределах (0,05 - 0,2) мкс.
2.14.3.13 Амплитуда излучаемого импульса Р2 в антенне должна быть:
а) равна или больше амплитуды излучаемого импульса Р1 в пределах боковых лепестков антенны, излучающей импульс Р1;
б) на уровне, который более чем на 9 дБ ниже амплитуды излучаемого импульса Р1 в пределах сектора запроса.
2.14.3.14 В пределах ширины луча запроса (главный лепесток) амплитуда излучаемого импульса Рз должна отличаться от амплитуды излучаемого импульса Р1 не более чем на 1 дБ.
2.14.3.15 Максимальная частота сигналов запроса должна быть:
не более 450 Гц для автономного режима УВД;
не более 250 Гц при совмещении режимов УВД.
2.14.3.16 ВРЛ должен обеспечивать прием и обработку ответных сигналов приемоответчиков режима УВД, имеющего следующие характеристики:
Функция ответа: обеспечивается путем передачи сигнала, состоящего из трёх групп импульсов координатных, ключевых и информационных. Временная структура сигналов ответа изображена на рисунке.
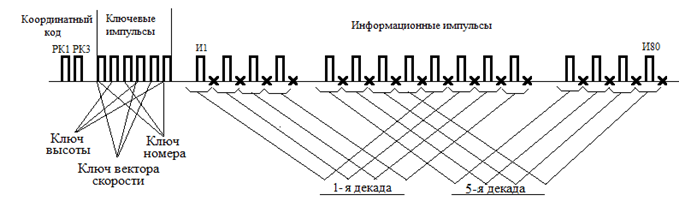
Координатные сигналы состоят из двух импульсов, обозначенных на рисунке 1 РК1и РК3. Интервал между импульсами определяет координатный код, приведенный в таблице:
| Координатный код | Интервал между импульсами РК1 и РК3 мкс (пред. откл. ±0,2) |
|---|---|
| ОК1 ОК2 ОК3 ОК6 | 14,0 11,0 18,0 6,0 |
При передаче сигнала "Бедствие" между сигналами РК1 и РК3 передают сигнал РК2.
Импульс РК2 сигнала "Бедствие" передается совместно с кодом кодами ОК1, ОК2, ОК3 и опережает импульс РК3 на (6,0±0,2) мкс.
Интервал между ключевыми импульсами должен определять информационный код, приведённый в таблице:
| Информационный код | Интервал между импульсами РКИ1 и РКИ2, мкс | Интервал между импульсами РКИ2 и РКИ3, мкс |
|---|---|---|
| (пред. откл. ± 0,2 мкс) | ||
| ОКИ1 ОКИ2 ОКИ3 | 8,0 8.0 12,0 | 12,0 8,0 4,0 |
Интервал между импульсами РК3 координатного кода и импульсом РКИ1 должен быть:
(8,5±0,5) мкс - для кода ОКИ1;
(14,0±0,5) мкс - для кода ОКИ2;
(10,0±0,5) мкс - для кода ОКИ3.
Интервал между ключевым импульсом РКИ3 и первой позицией информационных импульсов должен составлять (4,0±0,2) мкс.
Временной интервал между двумя информационными импульсами должен отличаться от соответствующего значения кратного 4 мкс не более чем на ±0,2.
Все импульсы сигналов ответов должны иметь длительность:
импульса - (0,8 ±0,2) мкс;
фронт импульса - от 0,05 до 0,1 мкс;
спад импульса - от 0,05 до 0,2 мкс.
2.14.4. Требования к IV и VI режиму ГРЛО
2.14.4.1 ВРЛ должен обеспечивать определение координат (азимут-дальность), запроса и приема дополнительной информации от воздушных судов, оборудованных ответчиками, c использованием следующих режимов:
а) режим IV - с целью опознавания и наблюдения (определения бортового номера);
б) режим VI - с целью получения информации о барометрической высоте и наблюдения.
2.14.4.2 Разрешающая способность ВРЛ в режимах IV/VI должна быть:
по дальности - не более 200 м;
по азимуту - не более ширины диаграммы направленности главного луча антенны.
2.14.4.3 Выходная мощность запросчика в пассивном режиме:
Когда передатчик запросчика не передает запрос, эффективная излучаемая мощность не должна превышать - 5 дБмВт на частотах от 1450 МГц до 1700 МГц.
2.14.4.4 Несущие частоты сигналов запроса и подавления ВРЛ должны быть (1532 1,0) МГц и не должны отличаться друг от друга не более чем на 0,2 МГц.
1,0) МГц и не должны отличаться друг от друга не более чем на 0,2 МГц.
2.14.4.5 МВРЛ должен принимать ответные сигналы на частотах (1458  1,0) МГц и (1470
1,0) МГц и (1470 1,0) МГц.
1,0) МГц.
2.14.4.6 Поляризация сигналов запроса, подавления и ответа должна быть вертикальной.
2.14.4.7 Сигнал запроса должен состоять из пяти основных импульсов Р1, Р2, Р3, P5 и Р6 и импульса подавления Р4, передаваемого вслед за импульсом РЗ.
2.14.4.8 Интервалы между импульсами запроса должны быть:
между импульсами Р1 и Р2- (3 ± 0,15) мкс;
между импульсами Р1 и Р3- (12 ± 0,15) мкс;
между импульсами Р1 и Р5- (21 ± 0,15) мкс;
между импульсами Pl и Р6- (33 ± 0,2) мкс для режима IV, (30 ± 0,2) мкс для режима VI.
2.14.4.9 Интервал между импульсами Р1 и Р4 должен составлять (16,0  0,15) мкс.
0,15) мкс.
2.14.4.10 Длительность импульсов Pl...P6, измеренная на уровне 0,5 от амплитуды на фронте и спаде импульсов, должна быть равна (0,35...0,7) мкс.
2.14.4.11 Время нарастания импульсов Р1...Р6 должно находиться в пределах (0,05 - 0,15) мкс.
2.14.4.12 Время спада импульсов Р1...Р6 должно находиться в пределах (0,05 -0,15) мкс.
2.14.4.13 Амплитуда излучаемого импульса Р4 в антенне должна быть:
а) равна или больше амплитуды излучаемого импульса Р1 в пределах боковых лепестков антенны, излучающей импульс Р1;
б) находиться на уровне, который более чем на 6 дБ ниже амплитуды излучаемого импульса Р1 в пределах желаемого сектора запроса.
2.14.4.14 В пределах ширины луча запроса (главный лепесток) амплитуда излучаемых импульсов Р2, Р3, Р5, Р6 должна отличаться от амплитуды излучаемого импульса Р1 не более чем на 1 дБ.
2.14.4.15 ВРЛ в режимах IV и VI ЕС ГРЛО должен обеспечивать прием и обработку ответных сигналов приемоответчика, имеющего следующие характеристики:
Сигналы ответа содержат координатную и информационную части. Координатная часть состоит из двух координатных импульсов, обозначенных РК. Информационная часть состоит из трех ключевых и 40 информационных импульсов, обозначенных РКИ и РИ, соответственно.
Функция ответа обеспечивается путем передачи сигнала, состоящего из двух координатных импульсов PКl и РК2 с интервалом между ними 6 мкс, в качестве самого элементарного кода. Несущая частота первого импульса - 1458 МГц, второго - 1470 МГц.
Для снижения внутрисистемных помех передача информационной части прорежена относительно передачи координатных импульсов в случайном порядке в соотношении 1:3. Ключевые и информационные импульсы излучаются с несущей частотой 1470 МГц.
Интервал между импульсом РК1 координатного кода и импульсом РКИ1 ключевого кода должен быть:
(23,5±0,15) мкс - для режима IV;
(27,5±0,15) мкс - для режима VI.
Интервал между импульсами РКИ1 и РКИ2 ключевого кода должен быть (8±0,15) мкс для режимов IV и VI.
Интервал между импульсами РКИ2 и РКИ3 ключевого кода должен быть:
(12±0,15) мкс для режима IV;
(8±0,15) мкс для режима VI.
Интервал между ключевым импульсом РКИЗ и первой позицией информационных им пульсов составляет (4,0±0,5) мкс.
Информационные импульсы обеспечивают передачу 20 двоичных разрядов информации.
Для передачи информационных разрядов используют 40 импульсов на 80 временных позициях, обозначенных И1, И2, ... , И80.
Интервал между двумя соседними позициями должен составлять (4,0±0,1) мкс.
Для передачи каждого из 20 разрядов информации используют четыре временные позиции. Для разряда с номером i, где i = 1, 2, ... , 20, используют позиции:
И2i-1, И2i, ... , И2i + 39, И2i + 40 на которых располагают два импульса.
Импульсы на позициях i-го разряда информационной посылки в зависимости от значения разряда располагают на позициях следующим образом:
при значении 1-И2i-1, И2i+З9;
при значении 0 - И2i, И2i+40.
Временной интервал между двумя любыми информационными импульсами должен отличаться от соответствующего значения, кратного 4 мкс, не более чем на ±0,2 мкс.
Все импульсы сигналов ответа имеют длительность:
импульса - (0,45 ... 0,7) мкс;
фронта и спада не более 0,15 мкс.
Информационный код режима IV содержит информационное слово №1 и обеспечивает:
передачу любого из 100 000 бортовых номеров;
обозначение бортового номера из пяти десятичных цифр, каждая от 0 до 9 включительно;
кодирование каждой цифры бортового номера четырьмя разрядами информационного кода, приведенными в таблице:
| Цифра бортового номера | Значение цифры | Группа разрядов |
|---|---|---|
| 1 2 3 4 5 | Десятки тысяч Тысячи Сотни Десятки Единицы | 17, 18, 19, 20 13, 14, 15, 16 9, 10, 11, 12 5, 6, 7, 8 1, 2, 3, 4 |
Положительные значения абсолютной или относительной барометрической высоты полета до 30 000 м передают градациями через 10 м в зависимости от типа ЛА. Отрицательные значения абсолютной или относительной барометрической высоты полета передают в диапазоне от 0 до 500 м. Данные о барометрической высоте передают с использованием четырех десятичных цифр, приведенных в таблице:
| Цифра бортового номера | Значение цифры | Группа разрядов |
|---|---|---|
| 1 2 3 4 | Десятки километров Единицы километров Сотни метров Десятки метров | 13, 14, 9, 10, 11, 12 5, 6, 7, 8 1, 2, 3, 4 |
Признак барометрической высоты передается значением 15-го разряда информационного кода, при этом значение 1 должно соответствовать абсолютной высоте, а значение 0 -относительной высоте.
Отрицательные значения абсолютной барометрической высоты полета передают либо в виде дополнительного кода группой разрядов от 1 до 8, при этом разряд 10 должен иметь значение 0, а разряды 9, 11, 12 - значение 1; либо прямым кодом, при этом разряды 10, 11, 12 должны иметь значения 1, а разряд 9 - значение 0.
Сигнал «Бедствие» (конфликтная -_ситуация) передают 16-м разрядом информационного кода, соответствующим значению 1.
ПРИЛОЖЕНИЕ № 5
к Правилам (п. 11.2)
Требования к радиолокационной системе обзора летного поля
(РЛС ОЛП)
1. РЛС ОЛП предназначена для контроля и управления движением воздушных судов, спецавтотранспорта, технических средств и других объектов, находящихся на рабочей площади аэродрома (площади маневрирования и перроне).
В состав оборудования РЛС ОЛП:
антенно-фидерные устройства;
приемопередающее устройство;
система дистанционного управления и контроля;
аппаратура обработки радиолокационной информации;
система точного времени для синхронизации информации;
устройство документирования, включая данные наблюдения и технического состояния;
источник бесперебойного питания (или распределенные ИБП);
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования:
2.1. РЛС ОЛП должна обеспечивать обнаружение движущихся и неподвижных ВС, спецавтотранспорта и других объектов с ЭПР не менее 1 кв. м, находящихся в пределах зоны действия в условиях атмосферных выпадаемых осадков (дождь интенсивностью до 16 мм/ч, град диаметром до 12 мм при скорости ветра 17 м/с и снег), и выдавать соответствующий отчет о цели:
с вероятностью не менее 0,99 при вероятности ложных тревог 10-4 на оборот антенны по собственным шумам приемника;
с вероятностью обнаружения не менее 0,9 при вероятности ложных тревог 10-4 на оборот антенны по помехам, создаваемым местными предметами и атмосферными выпадаемыми осадками.
2.2. РЛС ОЛП должна работать в X-диапазоне (8,0 - 10,5 ГГц) или Ku-диапазоне (15,5 - 15,7 ГГц), или Ka-диапазоне (24 - 40 ГГц) волн.
2.3. Период обновления радиолокационной информации РЛС ОЛП должен быть не более 1,015 с.
2.4. Зона обзора должна быть:
1) по азимуту - 360°;
2) по дальности:
минимальная - 90 м,
максимальная - 4000 м.
Примечание: Допускается секторный режим работы станции.
2.5. РЛС ОЛП должна обеспечивать возможность работы на излучение в настраиваемых секторах. Пределы сектора должны настраиваться с точностью не более 1°.
2.6. РЛС ОЛП должна обеспечивать автосопровождение ВС и ТС в диапазоне скоростей от 0 до 463 км/ч, находящихся на рабочей площади аэродрома в количестве не менее 250.
2.7. Ошибка измерения координат точечной цели (при 95%-ном доверительном интервале) на выходе РЛС ОЛП не должна превышать 7,5 м в любом направлении в любой точке зоны действия.
2.8. РЛС ОЛП должна обнаруживать передвижение цели при ее перемещении в любом направлении на расстояние 7,5 м и более.
2.9. Разрешающая способность РЛС ОЛП должна позволять разрешать две точечные цели, разнесенные на расстояние 30 м в пределах всей зоны действия.
2.10. Передача сообщений о ВС должна осуществляться в формате ASTERIX cat.240 и cat.10 или их последующих модификаций.
2.11. Оборудование станции должно иметь встроенную автоматическую систему диагностики технического состояния и поиска неисправностей до уровня функционально законченных блоков, узлов, устройств.
2.12. Должна обеспечиваться работа станции без обслуживающего персонала.
2.13. Средний ресурс должен составлять не менее 100 000 ч.
2.14. Средний срок службы должен составлять не менее 15 лет.
2.15. Средняя наработка на отказ должна составлять не менее 10 000 ч.
ПРИЛОЖЕНИЕ № 6
к Правилам (п. 12.2)
Требования к многопозиционной системы наблюдения (аэродромной) (МПСН-А)
1. Состав оборудования МПСН-А:
не менее четырех приемных станций;
не менее одной передающие станции;
не менее одного наземного контрольного приемоответчика;
центральный процессор;
выносной терминал управления.
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования
2.1. МПСН-А должна обеспечивать:
сопряжение с системой управления наземным движением и контроля A-SMGCS и автоматизированными системами (комплексами средств автоматизации) управления воздушным движением (УВД);
прием и обработку сигналов от ВС на частоте (1090 +/- 3) МГц в режимах RBS и S;
прием сигналов расширенного сквиттера от ВС и ТС, оборудованных аппаратурой автоматического зависимого наблюдения ADS-B 1090 ES (форматы DF = 17 и DF = 18) на частоте (1090 +/- 1,0) МГц.
2.2. Формат самогенерируемого сигнала DF = 17 должен состоять из следующих полей:
DF - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата.
CA - управляющее поле, 3-битовое поле сигнала, передаваемое по линии связи "вниз", содержит кодированное определение возможностей приемоответчика при ведении связи, используется в формате общего вызова.
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна.
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" в DF = 17 используется для радиовещательных сообщений,.
PI - четность/идентификатор запросчика. Поле PI кодируется II = 0.
2.3. Формат самогенерируемого сигнала DF = 18 должен состоять из следующих полей:
DF - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата.
CF - управляющее поле, 3-битовое поле, передаваемого по линии связи "вниз", используется для определения формата 112-битовой передачи.
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна.
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" может включать несколько типов самогенерируемого сигнала ES/NT.
PI - четность/идентификатор запросчика. Поле PI кодируется с II или SI = 0.
2.4. МПСН-А должна обеспечивать:
2.4.1. Прием самогенерируемого сигнала с периодом обновления:
0,5 с от движущихся ВС/ТС;
5 с от ВС/ТС в неподвижном состоянии.
2.4.2. Прием самогенерируемого сигнала с увеличенным периодом обновления:
при передвижении ВС/ТС на земле:
2 с сигнала местоположения;
5 с сигнала с опознавательными данными;
ВС/ТС в неподвижном состоянии:
5 с сигнала местоположения;
10 с сигнала с опознавательными данными.
2.4.3. Передачу запросов собственным(и) запросчиком(ами) на частоте (1030 +/- 0,01) МГц.
2.4.4. Вероятность частоты обновления данных в режиме S с периодом 1 с:
на перроне не менее 0,7;
на ВПП и РД не менее 0,95;
на стоянках (исключая стоянки на перроне) не менее 0,5;
для ВС, находящихся в полете, не менее 0,95.
2.4.5. Точность определения координат ВС/ТС на ВПП, РД и при маневрировании на перроне не хуже 7,5 м с доверительной вероятностью 0,95.
2.4.6. Точность определения координат ВС/ТС на стоянке (исключая стоянки на перроне), усредненная за 5 с не хуже 20 м с доверительной вероятностью 0,95.
2.4.7. Точность определения координат ВС не хуже:
20 м на расстоянии до 4600 м от порога ВПП;
40 м на расстоянии от 4600 до 9260 м от порога ВПП.
2.4.8. Вероятность обнаружения ВС/ТС в режиме S за время 2 с на ВПП, РД и перроне не менее 0,999.
2.4.9. Вероятность обнаружения ВС/ТС в режиме S за время 5 с на стоянках (исключая стоянки на перроне) не менее 0,999.
2.4.10. Вероятность правильной идентификации ВС/ТС (PID) не менее 0,999.
2.4.11. Обнаружение, идентификацию и сопровождение не менее 300 целей в установленной для нее зоне действия.
2.4.12. Задержку между принятием сигнала режима S и выдачей выходного сообщения не более 0,5 с.
2.4.13. Время установления рабочего режима не более 3 мин.
2.4.14. Время введения ВС/ТС в режим сопровождения не более 5 с.
2.4.15. Вероятность ложного обнаружения (PFD) менее 10-4.
2.4.16. Вероятность ложной идентификации ВС/ТС за 5 с менее 10-6.
2.4.17. Определение местоположения ВС/ТС в национальной системе координат пользователя с возможностью пересчета в системы координат WGS-84.
2.4.18. Автоматическую калибровку и оценку целостности МПСН-А в процессе ее работы.
2.5. Максимальная частота запроса МПСН-А не должна приводить к перегрузке ответчиков в поле ВРЛ.
2.6. МПСН-А должна обеспечивать документирование и воспроизведение координатной информации о текущем положении ВС и техническом состоянии системы.
2.7. Средний ресурс должен составлять не менее 100 000 час.
2.8. Средний срок службы должен составлять не менее 15 лет.
2.9. Средняя наработка на отказ оборудования МПСН-А должна составлять не менее 30 000 час.
2.10. Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ № 7
к Правилам (п. 13.1)
Требования к многопозиционной системы наблюдения (широкозонной) (МПСН-Ш)
1. Состав оборудования МПСН-Ш:
не менее четырех приемных станций;
передающая станция;
сервер-концентратор;
терминалы: местный, дистанционный, удаленный;
контрольный ответчик;
контрольный индикатор;
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования:
2.1. МПСН-Ш должна принимать и обрабатывать информацию от ВС с приемоответчиками, работающими в режимах A/C и S, и оборудованием генерации расширенных сквиттеров (АЗН-В 1090 ES). МПСН-Ш должна определять координаты целей независимо от информации, содержащейся в сообщениях АЗН-В.
2.2 Требования? к форматам сигнала:
2.2.1 Наблюдение, запрос данных о высоте, формат 4 сигнала по линии связи "вверх":
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
AP - адрес/четность.
2.2.2 Запрос опознавания в режиме наблюдения, формат 5 сигнала по линии связи "вверх":
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
AP - адрес/четность.
2.2.3 Запрос данных о высоте с использованием сообщений Comm-A, формат 20 сигнала по линии связи "вверх":
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
MA - сообщение, Comm-A;
AP - адрес/четность.
2.2.4 Запрос опознавания с использованием сообщения Comm-A, формат 21 сигнала по линии связи "вверх":
UF - формат сигнала по линии связи "вверх";
PC - протокол;
RR - запрос ответа;
DI - опознавание указателя;
SD - специальный указатель;
MA - сообщение, Comm-A;
AP - адрес/четность.
2.2.5 Ответ с данными о высоте в режиме наблюдения, формат 4 сигнала по линии связи "вниз"(данный ответ направляется при получении запроса UF 4 или 20 со значением поля RR менее 16:
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
AC - код высоты;
AP - адрес/четность.
2.2.6 Ответ опознавания в режиме наблюдения, формат 5 сигнала по линии передачи данных "вниз" (данный ответ направляется при получении запроса UF 5 или 21 со значением поля RR менее 16):
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
ID - опознавание;
AP - адрес/четность.
2.2.7 Ответ с данными о высоте в сообщении Comm-B, формат 20 сигнала по линии связи "вниз" (данный ответ передается при получении запроса UF 4 или 20 со значением поля RR более 15):
DF - формат сигнала по линии связи "вниз";
FS - полетный статус;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
AC - код высоты;
MB - сообщение, Comm-B;
AP - адрес/четность.
2.2.8 Ответ опознавания в сообщении Comm-B, формат 21 сигнала по линии "вниз" (данный ответ направляется при получении запроса UF 5 или 21 со значением поля RR более 15):
DF - формат сигнала по линии связи "вниз";
FS - состояние полета;
DR - запрос по линии связи "вниз";
UM - служебное сообщение;
ID - опознавание:
MB - сообщение, Comm-B;
AP - адрес/четность.
2.3. Требования к форматам сигналов DF = 17 и DF = 18
2.3.1. Формат самогенерируемого сигнала DF = 17 должен состоять из следующих полей:
DF - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата;
CA - возможности, данное 3-битовое поле сигнала, передаваемое по линии связи "вниз", содержит кодированное определение возможностей приемоответчика при ведении связи, используется в формате общего вызова;
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна;
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" в DF = 17 используется для радиовещательных сообщений;
PI - четность/идентификатор запросчика. Поле PI кодируется II = 0.
2.3.2. Формат самогенерируемого сигнала DF = 18 должен состоять из следующих полей:
DF - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата;
CF - управляющее поле, данное 3-битовое поле в DF-18 сигнала, передаваемое по линии связи "вниз", используется для определения формата 112-битовой передачи;
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна;
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" в DF = 18 может включать несколько типов самогенерируемого сигнала ES/NT;
PI - четность/идентификатор запросчика. Поле PI кодируется с II или SI = 0.
2.4. МПСН-Ш должна отождествлять правильно и сопровождать два ВС с идентичными адресами воздушного судна, разделенных расстоянием 18,52 км и более в пределах установленной зоны наблюдения.
2.5. МПСН-Ш должна обеспечивать сопровождение не менее 250 целей в установленной для нее зоне действия.
2.6. При превышении установленного порогового значения количества сопровождаемых целей МПСН-Ш должна включить индикатор переполнения, а также бит ASTERIX OVL в элемент I019/550 в отчете о статусе системы.
2.7. МПСН-Ш должна выдавать в системы УВД следующую информацию о ВС в форматах ASTERIX cat.020, cat.019:
данные отчета о цели (график/маршрут) - отчеты ASTERIX cat.020;
служебные сообщения (общий статус системы, статус подсистемы, исходное местоположение МПСН-Ш) - отчеты ASTERIX cat.019 или cat.025.
2.8. МПСН-Ш должна обеспечивать прием и обработку ответных сигналов приемоответчиков режимов A/C на частотах (1090 +/- 3) МГц.
2.9. МПСН-Ш должна обеспечивать прием и обработку ответных сигналов приемоответчиков с режимом S на частоте (1090 +/- 1) МГц.
2.10. МПСН-Ш должна обеспечивать запросы в режимах A/C и S.
2.11. МПСН-Ш:
не должна использовать запросы общего вызова в режиме S (UF11) и запрос общего вызова в режиме A/C/S (запрос с длительным P4 = 1,6 мкс);
в передаваемых запросах не должна использовать протоколы блокировки;
не должна передавать запросы устройствам, не являющимся приемоответчиками;
частота запросов целей в режиме S должна автоматически регулироваться с учетом "пассивно" принимаемых данных;
коды идентификатора запросчика (II) или идентификатора наблюдения (SI) должны быть конфигурируемыми параметрами;
при переходе в режим работы "Включено" должна обеспечивать возможность автоматически включать передачу запросов;
при переходе в режим работы "Регламент" должна обеспечивать возможность автоматически прекращать передачу запросов;
передающие станции должны осуществлять контроль исправности линии связи с центральным процессором, и в случае ее потери передающая станция должна автоматически прекратить передачу сигналов запросов;
должна предотвращать излучение запросных сигналов с мощностью, превышающей максимально допустимое значение, настраиваемое для каждой передающей станции в отдельности;
должна предотвращать излучение запросных сигналов с частотой, превышающей максимально допустимое значение, настраиваемое для каждой передающей станции в отдельности.
2.12. МПСН-Ш должна обеспечивать:
непрерывную (за период 1 месяц) функционально независимую архивацию всей входящей и исходящей информации от/на центр ОВД;
непрерывное (за период 1 месяц) архивирование информации о состоянии и работоспособности оборудования;
воспроизведение (вне реального времени) на инструментальном ПК архивной входящей и исходящей информации в заданном временном интервале.
2.13. Мощность передачи запросов МПСН-Ш должна быть управляемой (регулируемой).
2.14. Излучение паразитных незатухающих колебаний не должно превышать 76 дБ ниже уровня 1 Вт.
2.15. Для передач сигналов запроса должна использоваться вертикальная поляризация.
2.16. МПСН-Ш должна выдавать изменения информации идентификатора ВС и кода режима A с вероятностью не ниже 95% в течение времени, не превышающего трех интервалов обновления:
24 с для трассовой зоны;
12 с для аэродромной зоны.
2.17. МПСН-Ш должна выдавать изменения информации по аварийным кодам и специальной идентификации местоположения (SPI) с вероятностью не ниже 95% в течение времени, не превышающего интервал обновления:
8 с для трассовой зоны;
4 с для аэродромной зоны.
2.18. Вероятность обнаружения местоположения ВС в течение заданного интервала обновления должна превышать или быть равной:
97% - в течение интервала обновления 8 с для любой цели режимов RBS и S в трассовой зоне;
97% - в течение интервала обновления 4 с для любой цели режимов RBS и S в аэродромной зоне.
2.19. Вероятность пропусков данных о местоположении ВС в интервал времени, превышающий на 10% трехкратный интервал обновления (26,4 с для трассовой зоны и 13,2 с для аэродромной зоны), должна быть меньше или равна 0,1%.
2.20. Вероятность ложного обнаружения ВС в трассовой и аэродромной зоне должна быть меньше или равна 0,1%.
2.21. МПСН-Ш должна предоставлять в течение заданного интервала обновления:
адрес ВС с вероятностью, превышающей или равной 99%;
код режима A с вероятностью, превышающей или равной 98%;
код режима C с вероятностью, превышающей или равной 96%.
2.22. Вероятность ложного декодирования следующих параметров ВС должна быть меньше или равна 0,1%:
адреса режима S;
кода идентификации режима A;
кода режима C;
идентификатора ВС.
2.23. Погрешности горизонтального местоположения ВС (СКО) не должны превышать:
350 м для трассовой зоны;
150 м для аэродромной зоны.
Примечания
2.24. МПСН-Ш должна обеспечивать временные отметки местоположений ВС, синхронизированных с UTC.
Погрешность синхронизации между временной отметкой (истинное время UTC), привязанной к отчету о ВС, и временем применимости должна быть меньше или равна 100 мс.
2.25. МПСН-Ш должна иметь разрешающую способность позиционирования по положению для двух близкорасположенных целей, оборудованных приемоответчиками с режимом A/C с разными кодами режима A, в пределах двух горизонтальных эшелонирований в соответствии с таблицей 1.
Таблица 1
| Горизонтальное эшелонирование | Тип воздушного пространства | |
|---|---|---|
| Трассовый вариант | Аэродромный вариант | |
| Эшелонирование 1 | 3500 м | 1200 м |
| Эшелонирование 2 | 7000 м | 3500 м |
Вероятность определения местоположения двух разных целей, оборудованных приемоответчиками с режимом A/C, в пределах заданного интервала обновления должна превосходить или быть равной:
60% для эшелонирования 1;
98% для эшелонирования 2.
Вероятность правильного определения кода режимов A и C двух разных целей, оборудованных приемоответчиками с режимом A/C, в пределах заданного интервала обновления должна быть больше или равной:
30% для эшелонирования 1;
90% для эшелонирования 2.
2.26. Время инициирования трека должно быть меньше или равно трем заданным интервалам обновления с вероятностью 99%.
2.27. МПСН-Ш для трассовой и аэродромной зон в режиме вывода информации должна обеспечивать задержку обработки меньше или равной 1 с, отмеряемой от момента приема сигнала от цели приемными станциями и до выдачи МПСН-Ш отчета о цели.
2.28. МПСН-Ш в режиме вывода данных с периодической задержкой, когда в течение периода выдачи передается последнее полученное измеренное местоположение, должна обеспечивать максимальную задержку обработки меньше или равной продолжительности периода выдачи плюс 1 с.
2.29. МПСН-Ш в прогнозируемом периодическом режиме вывода данных, когда на момент выдачи передается прогнозируемое местоположение, должна обеспечивать максимальную задержку обработки меньше или равной 0,5 с.
2.30. Обязательные элементы отчетов о цели
2.30.1. Идентификатор источника данных (I020/010). Системный код идентификации (SIC) и системный код региона (SAC) согласно определению в стандарте ASTERIX должны быть изменяемыми.
2.30.2. Дескриптор отчета о цели (I020/020). Данный дескриптор должен содержать, как минимум, следующую информацию:
TYP - источники сигналов, задействованные в измерении MLAT;
RAB - индикатор полевого контрольного устройства;
SPI - наличие SPI;
GBS - статус наземного бита.
2.30.3. Время суток (I020/140). Время суток должно представлять время применимости отчета о цели, выраженное во времени суток UTC.
Если в отчете о цели указано горизонтальное местоположение, время суток должно представлять время применимости данных о горизонтальном местоположении.
2.30.4. Горизонтальное местоположение в координатах ПЗ-90.11. МПСН-Ш должна выдавать горизонтальное местоположение антенны приемоответчика ВС в координатах ПЗ-90.11.
2.30.5. Точность местоположения (горизонтальная) (I020/REF, PA/SDW). МПСН-Ш должна быть способна обеспечивать точность горизонтального местоположения в единицах среднеквадратических отклонений и ковариации.
Точность горизонтального местоположения в координатах ПЗ-90.11 должна иметь следующие характеристики:
 Lat - среднеквадратическое отклонение широты ПЗ-90.11;
Lat - среднеквадратическое отклонение широты ПЗ-90.11;
 Lon - среднеквадратическое отклонение долготы ПЗ-90.11;
Lon - среднеквадратическое отклонение долготы ПЗ-90.11;
COV-WGS - компонента ковариации широта/долгота.
2.30.6. Идентификация (код режима 3/A или идентификация воздушного судна) (I020/070 и I020/245). МПСН-Ш должна быть способна выдавать идентификацию рабочей цели в терминах кода режима 3/A и идентификацию воздушного судна.
Код режима 3/A должен сообщаться в отчете вместе со следующими индикаторами:
проверка;
искажение;
экстраполяция - данный индикатор указывает на то, был ли код режима 3/A извлечен из ответного сигнала приемоответчика. Бит экстраполяции назначается, если код не извлекался.
Код режима 3/A должен быть извлечен из сообщения в режиме S или ответного сигнала в режиме A.
2.30.7. Барометрическая высота (I020/090). МПСН-Ш должна выдавать барометрическую высоту, полученную от ВС, в терминах эшелона полета в двоичном представлении. Барометрическая высота, полученная из сообщения в режиме S, должна иметь преимущество перед режимом C, если она доступна и является действительной.
Барометрическая высота должна указываться в отчете со следующими индикаторами:
проверка;
искажение.
Барометрическая высота не должна сглаживаться или прогнозироваться.
2.30.8. Возраст (интервал между временем выдачи и временем применимости информации) барометрической высоты должен указываться в каждом отчете о цели ASTERIX, в котором предусмотрена барометрическая высота.
2.30.9. Адрес воздушного судна (I020/220). МПСН-Ш должна обеспечивать адрес воздушного судна для цели в режиме S.
2.30.10. Литер рейса, возможность передачи данных приемоответчиком ACAS (I020/230). МПСН-Ш должна обеспечивать выдачу литера рейса, возможность передачи данных приемоответчиком и возможности оборудования ACAS для цели в режиме S.
2.30.11. Специальная идентификация местоположения (SPI). МПСН-Ш должна обеспечивать передачу SPI. SPI должна выдаваться, если она доступна от одного из следующих источников:
ответ в режиме A;
ответ в режиме S;
расширенный сквиттер в режиме S.
2.30.12. Индикатор дублирующего или недействительного адреса воздушного судна (I020/030). МПСН-Ш должна указывать дублирующий или недействительный адрес воздушного судна с помощью соответствующего элемента данных в ASTERIX cat.020.
2.30.13. Время передачи отчета ASTERIX (I020/REF, TRT). МПСН-Ш должна обеспечивать время передачи отчета ASTERIX в каждом отчете о цели, в котором предусмотрен какой-либо элемент возраста данных (I020/REF, поле DA).
2.30.14. Данные о статусе. МПСН-Ш должна выдавать следующие данные о статусе и служебные сообщения с помощью ASTERIX cat.019:
тип сообщения (периодическое, событийное);
идентификатор источника данных;
время суток;
системный статус;
индикатор переполнения системы;
подробный статус сервера-концентратора;
подробный статус приемных станций;
подробный статус контрольно-референсного ответчика (при наличии контрольно-референсного ответчика) в МПСН-Ш);
индикатор действительности времени.
Сервисные донесения выдаются в формате ASTERIX cat.025.
2.31. Средний ресурс должен составлять не менее 100 000 ч.
2.32. Средний срок службы должен составлять не менее 15 лет.
2.33. Средняя наработка на отказ оборудования МПСН-Ш должна составлять не менее 30 000 ч.
2.34. Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ № 8
к Правилам (п. 15.3)
Требования к системе автоматического зависимого наблюдения радиовещательного /вещательного (система АЗН-В)
1. Состав системы АЗН-В включает:
средства приема и обработки сообщений АЗН-В;
средства обработки/объединения данных и распределения донесений АЗН-В;
средства связи и передачи данных;
средства управления и контроля.
2. Тактико-технические требования
2.1. Система АЗН-В должна обеспечивать прием и декодирование сообщений АЗН-В в форматах длительных самогенерируемых сигналов (сквиттеров) от ВС/ТС DF = 17 и DF = 18 на частоте (1090 +/- 1,0) МГц и/или в формате линии передачи данных VDL-4 (в ОВЧ-диапазоне с использованием модуляции GFSK и разделением каналов 25 кГц).
2.2. Система АЗН-В в части технологии 1090ES должна:
обеспечивать прием длительных самогенерируемых сигналов, содержащих сообщения о:
местоположении ВС в воздухе;
скорости ВС в воздухе;
местоположении ВС/ТС на земле;
типе и опознавании ВС/ТС;
инициируемые событием;
присваивать цели версию MOPS 0, пока принятые данные не укажут иное;
обрабатывать сообщения расширенного сквиттера от цели с назначенной версией MOPS 0 или с подтвержденной версией MOPS 0, 1 или 2;
обрабатывать сообщения расширенного сквиттера для версии MOPS больше 2 по аналогии с обработкой назначенной версии MOPS 2;
в границах своей зоны видимости правильно определять и обрабатывать сообщения от двух целей с одинаковыми 24-битными адресами ICAO (дублирование адреса ВС);
передавать донесения ASTERIX cat.021 только для целей, прошедших проверку правдоподобности глобального CPR-декодирования;
обрабатывать новые сообщения АЗН-В о местоположении для целей, прошедших проверку правдоподобности локального CPR-декодирования;
обрабатывать сообщения как полученные от новой цели, если с момента получения последнего достоверного сообщения о координатах от цели прошло более 225 с;
обрабатывать сообщения расширенного сквиттера следующих типов:
сообщения с DF = 17 от воздушных и наземных целей;
сообщения с DF = 18 и CF = 0 от наземных и воздушных целей с оборудованием АЗН-В не транспондерного типа;
сообщения с DF = 19 и AF = 0;
в режиме выдачи "по обновлению данных" формировать и передавать донесения ASTERIX cat.021 только при одновременном соблюдении следующих условий:
координаты цели успешно прошли проверку правдоподобности глобального CPR декодирования;
координаты цели успешно прошли проверку на дальность;
сообщение/донесение с координатами получено средствами обработки/объединения данных и распределения донесений только спустя заданное настроенное время после выдачи системой АЗН-В предыдущего донесения о данной цели;
обеспечивать в режиме выдачи "по обновлению данных" возможность настраивать минимальное время между отправками донесений о цели в промежутке от 0 до 8 с с шагом 0,1 с;
в режиме выдачи "по обновлению данных" формировать и передавать донесение ASTERIX cat.021 при приеме каждого сообщения с типом (ME Type/FTC), равным 0;
в "периодическом" режиме выдачи формировать и передавать донесение ASTERIX cat.021 для каждой услуги с заданным настраиваемым периодом;
в "периодическом" режиме период выдачи донесений о цели должен быть настраиваемым и задаваться, как минимум, в промежутке от 1 до 10 с с шагом 0,5 с;
в "периодическом" режиме выдачи формировать и передавать донесения ASTERIX cat.021 только при одновременном соблюдении следующих условий:
координаты цели успешно прошли проверку правдоподобности глобального CPR-декодирования;
координаты цели успешно прошли проверку на дальность;
информация о местоположении цели обновилась хотя бы один раз с момента предыдущей выдачи;
в "периодическом" режиме передавать донесение ASTERIX cat.021 для любой цели, если тип последнего сообщения о позиции (ME Type/FTC) равен 0;
выдавать донесения о цели в формате ASTERIX cat.021 со спецификацией для зарезервированного поля расширения;
включать в донесения о целях данные, извлеченные из сообщений, и указывать возраст данных, для которых это применимо;
обеспечивать включение в донесение данных из сообщений АЗН-В только в течение периода времени, который не превышает соответствующего значения времени достоверности;
по каждой подсистеме приема/наземной станции АЗН-В, реализующей функцию приема и обработки сообщений АЗН-В, обнаруживать ситуации, при которых количество принимаемых сообщений превышает настраиваемый порог аварийной сигнализации о перегрузке подсистемы приема, при этом соответствующая услуга должна переходить в состояние "Отказ"/"Ухудшение";
обнаруживать перегрузку каналов связи, при этом соответствующие услуги должны переходить в состояние "Отказ"/"Ухудшение";
обеспечивать в донесениях ASTERIX cat.025 о статусе услуги и системы присвоение полю SSTAT (I025/100) значение 2 ("Ухудшение"), а полю ERR (I025/105) значение 3 ("Автономное"), если синхронизация времени в средствах обработки/объединения и распределения донесений АЗН-В переходит в состояние "Автономное";
обеспечивать переход всех поддерживаемых услуг в состояние "Отказ", если в средствах обработки/объединения и распределения донесений АЗН-В возникает состояние синхронизации времени "Не связано с UTC";
обеспечивать переход услуги в состояние "Отказ"/"Ухудшение", если в одной или нескольких приемных подсистемах/наземных станциях АЗН-В, реализующих функцию приема и обработки сообщений АЗН-В и обеспечивающих данную услугу, возникает состояние синхронизации времени "Не связано с UTC";
сообщать об отказе конкретных подсистем приема в случае снижения чувствительности их приемников ниже настраиваемого порога. В этом случае соответствующие услуги должны переходить в состояние "Отказ" или "Ухудшение";
обеспечивать встроенный контроль оборудования и локализацию отказов с точностью до сменного узла (блока), определяемых производителем в эксплуатационной документации;
обеспечивать регистрацию и отображение состояний "Отказ" и "Ухудшение" с детализацией до сменного узла (блока).
2.3. Система АЗН-В в части технологии VDL-4 должна обеспечивать:
прием сообщений АЗН-В в формате линии передачи данных VDL-4 на канале глобальной сигнализации (GSC) 136, 925 МГц;
прием сообщений АЗН-В в формате линии передачи данных VDL-4 на локальной частоте, выбираемой в диапазоне 118 - 136; 975 МГц;
возможность автоматического управления каналом VDL-4, в том числе:
передачу сообщений как минимум на одном канале VDL-4 в диапазоне частот 112 - 137 МГц (на аэродромах и/или в регионах с высокой интенсивностью воздушного движения);
поддержку услуги информирования пользователей о поддерживаемых услугах (DoS), которая определяет виды предоставляемых услуг, а также каналы (частоты), на которых эти услуги предоставляются в данном регионе;
поддержку услуги управления каналом VDL-4, которая обеспечивает управление передачей сообщений ВС, находящихся в зоне видимости системы АЗН-В, включая состав данных, частоту передачи, состав сообщений и пр.;
прием фиксированной и переменной составных частей сообщения типа "Синхронизационный пакет".
2.4 .Система АЗН-В должна обеспечивать:
передачу, как минимум, донесений категорий ASTERIX 021, 025/023, 247;
выдачу донесений ASTERIX в режиме IP Multicast;
выдачу донесений о целях в одном из двух режимов:
"по обновлению данных";
"периодическом";
включение в соответствующие выходные данные последней полученной из сообщений информации;
последовательность отправки донесений ASTERIX cat.021 для одной и той же цели в строгом соответствии с последовательностью значений времени, указанных в элементе данных "время приема сообщения о координатах" (I021/073);
привязку ко времени UTC данных, передаваемых в донесениях ASTERIX, с использованием встроенного или внешнего источника времени по протоколу NTP с точностью не хуже +/- 50 мс для времени приема сообщений и +/- 30 мс для времени передачи донесений;
точность времени приема сообщений в рамках +/- 50 мс от фактического времени приема сообщения в течение как минимум 30 мин при потере синхронизации времени с UTC;
вероятность обновления данных АЗН-В для секторов УВД в соответствии с классами:
для секторов с низкой ИВД (РЦ, ДПП/ДПК) - 96,0%/96,5%;
для секторов со средней ИВД (РЦ, ДПП/ДПК) - 97,5%/97,5%;
для секторов с высокой ИВД (РЦ, ДПП/ДПК) - 98,5%/98,5%;
вероятность длительной потери обновления данных АЗН-В:
для секторов с низкой ИВД (РЦ, ДПП/ДПК) - 0,222%/0,185%;
для секторов со средней ИВД (РЦ, ДПП/ДПК) - 0,083%/0,074%;
для секторов с высокой ИВД (РЦ, ДПП/ДПК) - 0,037%/0,03%;
суммарную максимальную задержку, измеряемую от момента получения сообщения о позиции до момента отправки системой АЗН-В донесения о цели, не более 1,5 с;
среднее время между критическими отказами (полная потеря воздушной обстановки в секторе/нескольких соседних секторах УВД продолжительностью более 60 с) оборудования системы АЗН-В не менее 10 000 часов (исключая средства передачи данных внутри системы);
среднее время между критическими отказами средств передачи данных внутри системы не менее 10 000 часов;
среднее время восстановления (от момента приезда ремонтной бригады до восстановления работоспособности системы АЗН-В) не более 30 мин;
средний срок службы не менее 15 лет;
предоставление интерфейса для внешнего контроля с использованием SNMP, HTTP или другого протокола, позволяющего осуществлять контроль системы АЗН-В;
установку оператором как минимум двух режимов: "Работа" и "Регламент";
изменение режима работы и настроек только авторизованному персоналу;
сообщение как минимум о двух состояниях: "Норма" и "Отказ";
прием и обработку данных как минимум от 250 отдельных целей, находящихся в границах зоны действия системы АЗН-В;
следующие требования по контролю и управлению:
непрерывный контроль технического состояния и управление с рабочего места инженерно-технического персонала режимом работы системы и ее элементов;
автоматическую реконфигурацию системы АЗН-В при отказах ее зарезервированных элементов;
автоматическую индикацию текущей конфигурации системы АЗН-В, изменений технического состояния и режимов ее работы;
прием от составляющих элементов системы АЗН-В и отображение сообщений функционального контроля;
следующие требования по документированию (регистрации) и воспроизведению информации:
непрерывную функционально независимую регистрацию всей исходящей информации к потребителям;
непрерывную регистрацию информации о состоянии и работоспособности оборудования;
воспроизведение зарегистрированной информации в заданном временном интервале.
2.5. Прикладное программное обеспечение системы АЗН-В должно выполнять следующие функции:
управление системой;
обеспечение сетевых интерфейсов;
запись и воспроизведение исходных данных и данных в формате ASTERIX;
отображение данных АЗН-В и конфигурационных данных.
2.6. Требования к форматам сигналов DF = 17 и DF = 18.
2.6.1. Формат самогенерируемого сигнала DF = 17 должен состоять из следующих полей:
DF (1 - 5) - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата;
CA - возможности, данное 3-битовое поле сигнала, передаваемое по линии связи "вниз", содержит кодированное определение возможностей приемоответчика при ведении связи, используется в формате общего вызова;
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна;
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" в DF = 17 используется для радиовещательных сообщений;
PI - четность/идентификатор запросчика. Поле PI кодируется II = 0.
2.6.2. Формат самогенерируемого сигнала DF = 18 должен состоять из следующих полей:
DF (1 - 5) - формат сигнала линии связи "вниз", соответствует двоичному коду в первых 5 битах ответа и является дескриптором формата;
CF - управляющее поле, данное 3-битовое поле в DF = 18 сигнала, передаваемого по линии связи "вниз", используется для определения формата 112-битовой передачи;
AA - объявленный адрес, данное 24-битовое поле сигнала, передаваемого по линии связи "вниз", содержит адрес (объявленный) воздушного судна, который обеспечивает однозначное опознавание судна;
ME - сообщение, более длительный самогенерируемый сигнал, данное 56-битовое поле сигнала линии связи "вниз" в DF = 18 может включать несколько типов самогенерируемого сигнала ES/NT;
PI - четность/идентификатор запросчика. Поле PI кодируется с II или SI = 0.
2.7. Требования к способам взаимодействия с внешними потребителями.
2.7.1. Сопряжение и автоматизированное взаимодействие с внешними потребителями информации должно осуществляться с использованием локальной сети типа "Ethernet" в соответствии с протоколами UDP/IP.
2.7.2. Сопряжение и автоматизированное взаимодействие с внешними потребителями на представительском и прикладном должно осуществляться в соответствии с набором соответствующих протоколов ASTERIX:
категория 021 (версии 1.4 или выше) - для передачи донесений АЗН-В;
категория 023 или 025 (версии 1.2 или выше) - для передачи донесений о техническом состоянии системы АЗН-В;
категория 247 (версии 1.2 или выше) - для передачи донесений об используемой версии протокола ASTERIX.
2.7.3 .Донесения, формируемые и передаваемые в соответствии с протоколом ASTERIX cat. 021, должны содержать, по крайней мере, минимальный состав данных:
I021/010 Идентификатор источника данных;
I021/040 Дескриптор донесения о цели;
I021/070 Код вторичного ответчика режима A (сквок);
I021/071 Время применимости данных о положении или I021/073 Время приема сообщения о положении;
I021/075 Время приема сообщения о скорости;
I021/077 Время передачи донесения;
I021/080 24-битовый адрес цели;
I021/090 Индикаторы качества;
I021/130 Координаты WGS-84;
I021/145 Эшелон полета;
I021/150 Воздушная скорость или I021/151 Истинная воздушная скорость или I021/160 Путевая скорость;
I021/170 Идентификатор цели;
I021/200 Статус цели;
I021/210 Версия MOPS (версия промышленного стандарта, которой соответствует бортовое оборудование АЗН-В - для технологии 1090ES).
2.7.4. Донесения о статусе системы АЗН-В и статусе обслуживания, формируемые и передаваемые в соответствии с протоколом ASTERIX cat. 023, должны содержать, по крайней мере, минимальный состав данных:
I023/000 Тип донесения;
I023/010 Идентификатор источника данных;
I023/070 Время суток;
I023/100 Статус наземной станции.
2.7.5. Донесения о статусе системы АЗН-В, формируемые и передаваемые в соответствии с протоколом ASTERIX cat. 025, должны содержать, по крайней мере, минимальный состав данных:
I025/000 Тип донесения;
I025/010 Идентификатор источника данных;
I025/070 Время суток;
I025/100 Статус системы и обслуживания.
2.7.6. Донесения об используемой версии, формируемые и передаваемые в соответствии с протоколом ASTERIX cat. 247, должны содержать, по крайней мере, минимальный состав:
I247/010 Идентификатор источника данных;
I247/140 Время суток;
I247/550 Донесение об используемом номере версии соответствующей категории.
2.8. Требования к обработке времени достоверности данных.
| Параметры донесений АЗН-В | Обработка времени достоверности данных |
|---|---|
| Горизонтальные координаты в полете | Использовать /071/073 |
| NIC (+ NICsupp B)/NUCp | /071 /073 |
| Барометрическая высота | Опционально использовать возраст данных FL |
| SUR Статус в полете, включая IDENT | Использовать /071 /073 |
| Горизонтальные координаты на земле | Использовать /071 /073 |
| NIC/NUCp | Использовать /071 /073 |
| Вектор путевой скорости | Использовать /071 /073 |
| Идентификация ВС | Использовать время достоверности 100 с |
| Категория эмиттера | Время достоверности не применяется |
| Вектор воздушной скорости | Использовать /072 /075 |
| NACv (NUCr) в полете | Использовать /072 /075 |
| Флаг изменения намерений | Использовать /072 /075 |
| Баровертикальная скорость Геовертикальная скорость | Использовать возраст данных BVR & GVR, соответственно |
| Геометрическая высота | Использовать возраст данных GH |
| Воздушная скорость | Использовать AS & TAS, соответственно |
| Магнитный курс | Использовать возраст данных MH (для MH) |
| Истинный курс | Для TNH использовать время достоверности 10 с |
| Аварийное состояние/Статус приоритета | Для ненулевого аварийного состояния использовать возраст данных TS Для ′7500′, ′7600′ & ′7700′ кодов режима A использовать возраст данных M3A В иных случаях использовать время достоверности 100 с |
| Код режима A | |
| Донесение о рекомендации ACAS | Использовать возраст данных ARA для ненулевого условия информации ARA (флаг 1090 ES ′RAT′ управляемый) В иных случаях использовать время достоверности 100 с |
| NACp, SIL, SILsupp, NICBARO | Использовать возраст данных QI |
| TCAS Ops | Использовать возраст данных ARA для условий ′Рекомендация TCAS активный ′RA" Использовать возраст данных ′AOS′ для определения достоверности флага ′not TCAS′ |
| Установленная высота | Использовать возраст данных ISA & FSA |
| Установка барометрического давления | Использовать возраст данных ISA & FSA |
| Режим LNAV включен, навигационный режим и т.д. | Использовать возраст данных ISA & FSA - не ориентироваться на возраст данных TS |
| Установленный курс | Использовать возраст данных ISA & FSA |
| Версия MOPS | Использовать время достоверности 50 с |
| NICsupps, SDA, GVA | Использовать время достоверности 50 с |
| Единственная антенна | Время достоверности не применяется |
| Опорное горизонтальное направление | Использовать время достоверности 50 с |
| Смещение антенны GPS | Время достоверности не применяется |
| Режим работы на земле | Использовать время достоверности 50 с |
| IDENT на земле | |
| 1090 ES/UAT IN | Время достоверности не применяется |
2.9. Требования к формированию донесений.
2.9.1. Правила сборки донесений ASTERIX cat. 021:
параметры, содержащиеся в элементе данных I021/008, должны заполняться из сообщений типов: "эксплуатационный статус ВС" (FTC = 31), а также "состояние и статус ВС" (FTC = 29);
в том случае, если элемент данных I021/008 заполняется одновременно из двух сообщений, следует использовать данные более позднего сообщения;
начения полей элемента данных I021/008 должны быть равны нулю, если в сообщении расширенного сквиттера отсутствуют соответствующие параметры.
I021/010 Идентификация источника данных:
параметры SIC и SAC, передаваемые в элемент данных I021/010, должны быть равны значениям установленных параметров SIC и SAC. Значения SIC и SAC должны иметь формат двоичных целых чисел без знака.
I021/015 Идентификатор услуги:
идентификатор услуги, передаваемый в элементе данных I021/015, должен быть равен значению идентификатора услуги, в рамках которой формируется данное донесение.
I021/016 Организация услуги:
в режиме выдачи донесений "по обновлению данных" поле RP в элементе данных I021/016 должно быть установлено в ноль. В "периодическом" режиме поле RP в элементе данных I021/016 должно кодироваться в соответствии со спецификацией поддерживаемого протокола ASTERIX cat. 021.
I021/020 Категория эмиттера:
параметры, содержащиеся в элементе данных I021/020, должны заполняться в соответствии с таблицей:
| Сообщение "Идентификация ВС и тип" | Параметр ECAT поля I021/020 | ||
|---|---|---|---|
| FTC(подтип) | Код категории эмиттера | Этап обработки: MOPS версия 1 или 2 подтверждена | Этап обработки: MOPS версия 0 назначается или подтверждена |
| 1(D) | 1-7 | Не заполняется | Не заполняется |
| 2(C) | 0 | Не заполняется | Не заполняется |
| 2(C) | 1 | 20 | 20 |
| 2(C) | 2 | 21 | 21 |
| 2(C) | 3 | 22 | 22 |
| 2(C) | 4 | 23 | Не заполняется |
| 2(C) | 5 | 24 | Не заполняется |
| 2(C) | 6-7 | Не заполняется | Не заполняется |
| 3(B) | 0 | Не заполняется | Не заполняется |
| 3(B) | 1 | 11 | 11 |
| 3(B) | 2 | 12 | 12 |
| 3(B) | 3 | 16 | 16 |
| 3(B) | 4 | 15 | 15 |
| 3(B) | 5 | Не заполняется | Не заполняется |
| 3(B) | 6 | 13 | 13 |
| 3(B) | 7 | 14 | 14 |
| 4(A) | 0 | Не заполняется | Не заполняется |
| 4(A) | 1 | 1 | 1 |
| 4(A) | 2 | 2 | 2 |
| 4(A) | 3 | 3 | 3 |
| 4(A) | 4 | 4 | 4 |
| 4(A) | 5 | 5 | 5 |
| 4(A) | 6 | 6 | 6 |
| 4(A) | 7 | 10 | 10 |
I021/040 Дескриптор донесения о цели:
поле ATP (тип адреса, биты 8, 7 и 6 основного подполя) должно принимать следующие значения:
“1” (дублированный адрес) в том случае, если система АЗН-В обнаруживает, что данная цель имеет такой же 24-битовый адрес, как и другая цель;
“0” (адрес ИКАО) в том случае, если цель не дублируется и не является нетранспондерным устройством (DF = 18, CF = 1), указывая на то, что DF = 17, или DF = 18 при CF = 0, или DF = 19 при AF = 0.
поле ARC (разрешающая способность данных о высоте, биты 5 и 4 основного подполя) должно принимать следующие значения:
“0” (25 фут), в том случае, если от цели получено сообщение о положении в воздухе с Q, равным 1 (16-й бит поля ME, 48 битов в сообщении);
“1” (100 фут), в том случае, если от цели получено сообщение о положении в воздухе с Q, равным 0 (16-й бит поля ME, 48 битов в сообщении);
“2” ("Неизвестно"), в том случае, если донесение не содержит достоверных данных высоты или от цели не было получено сообщений о положении в воздухе;
поле RAB (тип донесения, бит 2 основного подполя) должно принимать значение 1 (Донесение контрольного ответчика), если адрес ИКАО совпадает с адресом контрольного ответчика, указанным в настраиваемом параметре системы наблюдения. В противном случае параметр RAB должен принимать значение 0 (донесение от транспондера цели);
поле DCR (дифференциальная поправка, бит 8 первого расширения) должно принимать значение 0 - координаты без дифференциальной коррекции;
поле GBS (признак нахождения на земной поверхности, бит 7 первого расширения) должно принимать значение 0 для целей, передающих сообщения о положении в воздухе, и 1 для целей, передающих сообщения о положении на земле;
поле SIM (смоделированная цель, бит 6 первого расширения) должно принимать значение 0 (донесение о реальной цели), когда система АЗН-В формирует донесение, содержащее реальные данные, извлеченные из принятых по радиоканалу в реальном времени сообщений расширенного сквиттера;
если наземная станция передает донесение, содержащее смоделированные данные о виртуальной цели (например, для целей тестирования аппаратуры), то поле SIM должно принимать значение 1 (донесение о смоделированной цели);
поле TST (тестовая цель, бит 5 первого расширения) должно принимать значение 1, если адрес цели соответствует установленному внутреннему тестовому адресу цели;
поле TST (тестовая цель, бит 5 первого расширения) должно принимать значение 0, если адрес цели не соответствует установленному внутреннему тестовому адресу цели;
поле SAA (доступность установленной высоты, бит 4 первого расширения) должно принимать значение 1 (оборудование не поддерживает передачу данных о установленной высоте), если подтверждено значение MOPS версии транспондера 0. Поле SAA должно быть также установлено в 1, если подтверждено значение MOPS версии транспондера 1 и поле "Характеристика высоты цели" не принимает значения 1 или 2. В остальных случаях SAA принимает значение 0;
поле CL (уровень доверия, биты 3 и 2 первого расширения) должно принимать значение 0 (достоверное донесение);
если система АЗН-В настроена на выдачу донесений ASTERIX cat. 021 при нахождении в режиме "Регламент" или состоянии "Отказ" и услуга находится в режиме "Регламент" или в состоянии "Отказ", то в элементе данных I021/040 должно быть установлено значение 1 в полях NOGO и CL.
I021/070 Код вторичного ответчика режима A:
элемент данных I021/070 следует заполнять данными, содержащимися в сообщениях расширенного сквиттера:
| Биты I021/070 | Содержание |
|---|---|
| 13 - 16 (резерв) | Всегда 0 |
| 1 - 12 | Соответствие полученных битов расширенного сквиттера битам донесения ASTERIX cat. 021 |
I021/071 Время применимости данных о местоположении:
элемент данных I021/071 должен быть включен в донесение о цели, если бит T (ME бит 21, сообщение 53) последнего сообщения о позиции принимает значение 1 и состояние синхронизации времени "Синхронизировано" или "Автономное".
I021/072 Время применимости данных о скорости:
не заполняется.
I021/073 Время приема сообщения о местоположении:
элемент данных I021/073 должен включаться в донесение в том случае, если донесение АЗН-В содержит данные местоположения;
время приема сообщения о положении, записываемое в поле I021/073, должно отражать момент времени UTC, в который фронт импульса P1 сообщения о положении поступил на вход приемника наземной станции.
I021/075 Время приема сообщения о скорости:
время приема сообщения о скорости, записываемое в элемент данных I021/075, должно отражать момент времени UTC, в который фронт импульса P1 сообщения о скорости поступил на вход приемника наземной станции.
I021/077 Время передачи донесения:
поле I021/077 должно содержать время передачи текущего донесения ASTERIX.
I021/080 Адрес цели:
биты с 24 до 1 поля I021/080 должны быть равны битам с 9 по 32, содержащимся в первом сообщении о положении, полученном от цели.
I021/090 Показатели качества:
для целей MOPS версии 0 элемент данных I021/090 должен кодироваться в соответствии с таблицей:
| Код типа формата | NUCp | PIC |
|---|---|---|
| 0 | 0 | 0 |
| 5 | 9 | 14 |
| 6 | 8 | 13 |
| 7 | 7 | 11 |
| 8 | 0 | 0 |
| 9 | 9 | 14 |
| 10 | 8 | 13 |
| 11 | 7 | 11 |
| 12 | 6 | 10 |
| 13 | 5 | 8 |
| 14 | 4 | 6 |
| 15 | 3 | 5 |
| 16 | 2 | 2 |
| 17 | 1 | 1 |
| 18 | 0 | 0 |
| 20 | 9 | 14 |
| 21 | 8 | 13 |
| 22 | 0 | 0 |
для целей версии 1 элемент данных I021/090 должен кодироваться в соответствии с таблицей:
| Код типа формата | NIC supplement | NIC | PIC |
|---|---|---|---|
| 0 | - | 0 | 0 |
| 5 | 11 | 14 | |
| 6 | 10 | 13 | |
| 7 | 1 | 9 | 12 |
| 0/Недопустимо | 8 | 11 | |
| 8 | 1 | 7 | 10 |
| 0/Недопустимо | 0 | 0 | |
| 9 | - | 11 | 14 |
| 10 | 10 | 13 | |
| 11 | 1 | 9 | 12 |
| 0/Недопустимо | 8 | 11 | |
| 12 | - | 7 | 10 |
| 13 | 0 | 6 | 8 |
| 1/Недопустимо | 7 | ||
| 14 | - | 5 | 6 |
| 15 | 4 | 5 | |
| 16 | 1 | 3 | 4 |
| 0/Недопустимо | 2 | 3 | |
| 17 | - | 1 | 1 |
| 18 | 0 | 0 | |
| 20 | 11 | 14 | |
| 21 | 10 | 13 | |
| 22 | 0 | 0 |
для целей MOPS версии 2 элемент данных I021/090 должен кодироваться в соответствии с таблицей:
| Код типа формата | NIC supplement A | NIC supplement B | NIC | PIC |
|---|---|---|---|---|
| 0 | - | - | 0 | 0 |
| 5 | 11 | 14 | ||
| 6 | 10 | 13 | ||
| 7 | 1 | 0/1/Недопустимо | 9 | 12 |
| 0/Недопустимо | 0/1/Недопустимо | 8 | 11 | |
| 8 | 1 | 1 | 7 | 10 |
| 1 | 0 | 6 | 9 | |
| 0 | 1 | 7 | ||
| 0/1/Недопустимо | 0/1/Недопустимо | 0 | 0 | |
| 9 | - | - | 11 | 14 |
| 10 | 10 | 13 | ||
| 11 | 0/1/Недопустимо | 1 | 9 | 12 |
| 0/1/Недопустимо | 0 | 8 | 11 | |
| 12 | - | - | 7 | 10 |
| 13 | 0 | 1 | 6 | 9 |
| 0/1/Недопустимо | 0 | 8 | ||
| 1/Недопустимо | 1 | 7 | ||
| 14 | - | - | 5 | 6 |
| 15 | 4 | 5 | ||
| 16 | 0/1/Недопустимо | 1 | 3 | 4 |
| 0/1/Недопустимо | 0 | 2 | 3 | |
| 17 | - | - | 1 | 1 |
| 18 | 0 | 0 | ||
| 20 | 11 | 14 | ||
| 21 | 10 | 13 | ||
| 22 | 0 | 0 |
значения битов каждого подполя элемента данных I021/090 должны соответствовать значениям бита подполя в сообщении расширенного сквиттера;
для версии 1 и выше параметры NICbaro, SIL, SIL Supplement (для версии 2) и NACp должны заполняться из сообщений типов: "эксплуатационный статус ВС" (FTC = 31), а также "состояние ВС и статус" (FTC = 29), ближайших по времени к последнему принятому сообщению о позиции;
если донесение "Вектор состояния" не содержит данных о скорости (т.е. поля I021/REF-SGV, I021/150, I021/151 или I021/160 отсутствуют), параметр "NUCr or NACv" должен принимать значение 0;
для целей с дублированными адресами режима S, а также неподтвержденных целей (находящихся на этапе захвата и назначения 0 версии MOPS) в поле I021/090 должен заполняться только параметр "NUCp", а другие биты основного поля должны принимать нулевые значения.
I021/130 Местоположение в координатах WGS-84:
кодированные значения широты и долготы, содержащиеся в сообщениях расширенного сквиттера о положении в воздухе (FTC = 9 - 18 или 20 - 22), должны декодироваться в широту и долготу с использованием алгоритмов CPR;
кодированные значения широты и долготы, содержащиеся в сообщениях расширенного сквиттера о положении на земле (FTC = 5 - 8), должны декодироваться в широту и долготу с использованием алгоритмов CPR;
кодирование элемента данных I021/130 должно осуществляться в соответствии с требованием ASTERIX I021/130;
система АЗН-В должна исключить элемент данных I021/130 из донесения о цели, если последнее принятое сообщение от цели АЗН-В имеет FTC = 0.
I021/140 Геометрическая высота:
если FTC последнего сообщения о положении в воздухе равен 20 - 22 и данные поля "Высота" достоверны, геометрическая высота должна быть равной значениям поля "Высота" в последнем сообщении о положении в воздухе и преобразованной в код, указанный в элементе данных I021/140 в спецификации ASTERIX;
если FTC последнего сообщения о положении в воздухе равно 9 - 18, и данные полей "Высота", "Знак отличия от барометрической высоты" и "Отличие от барометрической высоты" достоверны, геометрическая высота должна быть равна значениям поля "Высота" плюс "Отличие от барометрической высоты", если "Знак отличия от барометрической высоты" равен нулю, и должна быть равна значениям поля "Высота" минус "Отличие от барометрической высоты", если "Знак отличия от барометрической высоты" равен единице;
если в полях "Отличие от барометрической высоты" или "Высота" стоят все нули, то элемент данных I021/140 не следует включать в донесение;
если в поле "Отличие от барометрической высоты" все единицы, то поле I021/140 должно принимать значение "greater then" ("0111111111111111") в соответствии с форматом данных поля I021/140 используемой спецификации протокола ASTERIX cat. 021.
I021/145 Эшелон полета:
эшелон полета должен быть включен в донесение, только если сообщения о местоположении ВС в воздухе были переданы с барометрической высотой (FTC = 0 или 9 - 18);
если с момента передачи последнего донесения "Вектор состояния" от цели получено сообщение о местоположении в воздухе (FTC = 0 или 9 - 18), то элемент данных I021/145 должен быть включен в донесение, а его содержание заполняется на основе поля "Высота" в сообщении расширенного сквиттера в соответствии с указанным ниже:
если бит Q в поле "Высота" равен 1, то элемент данных I021/145 должен представлять собой десятичное значение остальных битов минус 40, выраженное в виде двоичного числа 16-разрядного дополнительного кода;
если бит Q в поле "Высота" равен 0, то элемент данных I021/145 устанавливается в соответствии с высотой, полученной из оставшихся битов, используя 100-футовое кодирование, описанное в ICAO DOC 9688 "Руководство по специальным услугам режима S", издание второе, 2004 г. Это значение высоты (в футах) делится на 100, умножается на 4 и выражается в виде двоичного числа 16-разрядного дополнительного кода;
элемент данных I021/145 не следует включать в состав донесения, если выполняется одно или несколько условий:
все биты в поле "Высота" сообщения о положении в воздухе равны нулю;
в поле "Высота" бит Q равен нулю и поле не содержит достоверной высоты, закодированной с использованием кода Гиллхэма;
в последнем сообщении о положении в воздухе FTC = 20, 21 или 22;
сообщение о положении на земле получено позже, чем последнее сообщение о положении в воздухе.
I021/146 Установленная высота:
Для целей с MOPS версии 1:
параметр SAS (доступность источника, бит 16) должен принимать значение 0 (нет информации от источника), если в поле "Достоверны данные в вертикальной плоскости/Индикатор источника" сообщения "Состояние и статус цели" установлено значение 0 (отсутствуют достоверные данные о состоянии цели в вертикальной плоскости);
параметр SAS (доступность источника, бит 16) должен принимать значение 1 (информация от источника доступна), если в поле "Достоверны данные в вертикальной плоскости/Индикатор источника" сообщения "Состояние и статус цели" установлено значение 1;
подполе Source элемента данных I021/146 для версии 1 должно соответствовать таблице:
| Параметр "VerticalDataAvailable/SourceIndicator" сообщения "Состояние и статус цели" (FTC = 29 подтип 0) | Параметр "Source" в подполе I021/146 |
|---|---|
| 0: Достоверные данные о состоянии цели в вертикальной плоскости отсутствуют | 0: Неизвестно |
| 1: Значение, установленное на панели управления автопилота (MCP, FCU) | 2: Установленная высота на FCU/MSP |
| 2: Высота полета в зоне ожидания | 1: Высота ВС |
| 3: Система FMS/RNAV | 3: Установленная высота на FMS |
поле Altitude должно быть равным:
Altitude = (100*N-1000)/25
где N - значение, полученное из сообщения "Состояние и статус цели", в поле "Высота цели".
элемент данных I021/146 должен быть исключен из донесения, если N > 1010 (десятичное) или сообщение с FTC = 29 не было получено.
Для целей MOPS версии 2:
элемент данных I021/146 должен быть исключен из донесения, если в поле "Установленная высота на MCP/FCU" или "Установленная высота на FMS" сообщения "Состояние и статус цели" установлено значение 0;
подполя Source и SAS в элементе данных I021/146 должны заполняться в соответствии с таблицей:
| Поле "Тип установленной высоты" сообщения "Состояние и статус цели" (FTC = 29, подтип 1) | "Установленная высота" (I021/146), подполе "Source" | "Установленная высота" (I021/146), подполе "SAS" |
|---|---|---|
| 0: MCP, FCU | 2: Установленная высота на FCU/MSP | 1 |
| 1: FMS | 3: Установленная высота на FMS | 1 |
параметр Altitude (Высота, биты 13 - 1) должен быть равен:
Altitude = floor (32*(N-1)/25 + 0,5),
где N - значение, полученное из сообщения "Состояние и статус цели", в поле "Установленная высота".
I021/150 Воздушная скорость:
элемент данных I021/150 должен включаться в донесение только в том случае, если подтип последнего сообщения о скорости в воздухе (FTC = 19) - 3 или 4, "Тип воздушной скорости" - 0 и значение параметра "Воздушная скорость" не равно десятичному числу 0 или 1023;
поле IM (бит 16 в поле I021/150) должно быть равным 0 (IAS);
поле Air Speed ("Воздушная скорость", биты 15 - 1 в поле I021/150) должно представлять результат вычисления следующих выражений, округленный до ближайшего целого и выраженный в виде целого числа без знака в двоичном виде:
подтип 3 (нормальный):
воздушная скоость = 214 *(значение в поле AIRSPEED сообщение о скорости - 1)/3600;
подтип 4 (сверхзвуковой):
воздушная скоость = 4*214 *(значение в поле AIRSPEED сообщение о скорости - 1)/3600.
I021/151 Истинная воздушная скорость:
элемент данных I021/151 следует включать в донесение только в том случае, если одновременно выполняются следующие условия:
получено сообщение о скорости в воздухе (FTC = 19, подтип 3 или 4);
тип воздушной скорости (бит 25 поля ME) - 1;
значение воздушной скорости (биты 26 - 35 поля ME) не равно 0;
если значение параметра воздушной скорости в сообщении о скорости в воздухе равно 1023, то параметр "RE" (превышение диапазона, бит 16 в поле I021/151) должен принимать значение 1, а параметр "True Airspeed" - значение 1022 узла, если сообщение о скорости в воздухе имеет подтип 3 и значение 4088 узлов, если сообщение о скорости в воздухе имеет подтип 4.
I021/152 Магнитный курс:
если цель осуществляет передачу сообщений MOPS версии 0, элемент данных I021/152 следует включать в донесение только в том случае, когда подтип последнего принятого сообщения о скорости в воздухе (FTC = 19) - 3 или 4 и параметр "Бит статуса магнитного курса" принимает значение 1;
если цель осуществляет передачу сообщений MOPS версий 1 или 2, элемент данных I021/152 следует включать в донесение только в том случае, когда подтип последнего принятого сообщения о скорости в воздухе (FTC = 19) - 3 или 4, параметр "Бит статуса курса" принимает значение 1 и параметр "Направление отсчета в горизонтальной плоскости" последнего принятого сообщения о эксплуатационном статусе ВС принимает значение 1;
элемент данных I021/152 должен заполняться данными из сообщения о скорости в воздухе в зависимости от MOPS версии цели:
для целей MOPS версии 0 - параметр "Магнитный курс";
для целей MOPS версий 1 и 2 - параметр "Курс".
I021/155 Барометрическая вертикальная скорость:
элемент данных I021/155 следует включать в состав донесения, если выполняются следующие условия:
получено сообщение о скорости в воздухе;
поле "Бит источника для вертикальной скорости" в сообщении о скорости в воздухе принимает значение 1;
поле "Вертикальная скорость" в сообщении о скорости в воздухе не равно 0;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает одно из значений в пределах от 1 до 510 включительно, а параметр "Бит знака вертикальной скорости" (бит 37 поля ME) равен 1, поле "Вертикальная скорость" элемента данных I021/155 должно быть следующим:
floor((значение параметра “Вертикальная скорость”-1)*64/6,25 + 0,5;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает одно из значений в пределах от 1 до 510 включительно, а поле "Бит знака вертикальной скорости" (бит 37 поля ME) равно 0, поле "Вертикальная скорость" элемента данных I021/155 должно быть следующим:
floor((значение параметра “Вертикальная скорость”-1)*64/6,25 + 0,5;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает значение "511", поле "RE" элемента данных I021/155 должно принимать значение 1, а поле "Вертикальная скорость" элемента данных I021/155 следует заполнять согласно приведенным выше правилам.
I021/157 Геометрическая вертикальная скорость:
элемент данных I021/157 следует включать в состав донесения, если выполняются следующие условия:
получено сообщение о скорости в воздухе;
поле "Бит источника для вертикальной скорости" в сообщении о скорости в воздухе принимает значение 0;
поле "Вертикальная скорость" в сообщении о скорости в воздухе не равно 0;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает одно из значений в пределах от 1 до 510 включительно, а поле "Бит знака вертикальной скорости" (бит 37 поля ME) равно 1, поле "Вертикальная скорость" элемента данных I021/157 должно быть следующим:
floor((значение параметра “Вертикальная скорость”-1)*64/6,25 + 0,5;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает одно из значений в пределах от 1 до 510 включительно, а поле "Бит знака вертикальной скорости" (бит 37 поля ME) равно 0, поле "Вертикальная скорость" элемента данных I021/157 должно быть следующим:
floor((значение параметра “Вертикальная скорость”-1)*64/6,25 + 0,5;
если поле "Вертикальная скорость" в сообщении о скорости в воздухе принимает значение "511", параметр "RE" элемента данных I021/157 должен принимать значение 1, а поле "Вертикальная скорость" элемента данных I021/157 следует заполнять согласно приведенным выше правилам.
I021/160 Вектор путевой скорости
элемент данных I021/160 следует включать в состав донесения, если выполняются следующие условия:
с момента выдачи предшествующего донесения "Вектор состояния" для данной цели получено новое сообщение о скорости в воздухе (FTC = 19) с подтипом 1 или 2;
параметры "Скорость С/Ю" (биты 26 - 35 поля ME, биты 58 - 67 в сообщении о скорости в воздухе) и "Скорость З/В" (биты 15 - 24 поля ME, биты 47 - 56 в сообщении о скорости в воздухе) не равны 0;
поле "Путевая скорость" в элементе данных I021/160 следует заполнять величиной векторной суммы составляющих скоростей "С/Ю" и "З/В" из сообщения о скорости в воздухе, выраженной в виде 15-разрядного целого числа без знака, младший значащий бит которой составляет 2-14 морских миль в секунду;
поле "Путевой угол" (рисунок 1) в элементе данных I021/160 следует заполнять значением угла, отсчитанного от истинного севера по часовой стрелке до вектора путевой скорости, заданного составляющими скоростей "С/Ю" и "З/В" из сообщения о скорости в воздухе, выраженной в виде 16-разрядного целого числа без знака, младший значащий бит которой составляет 360/216;
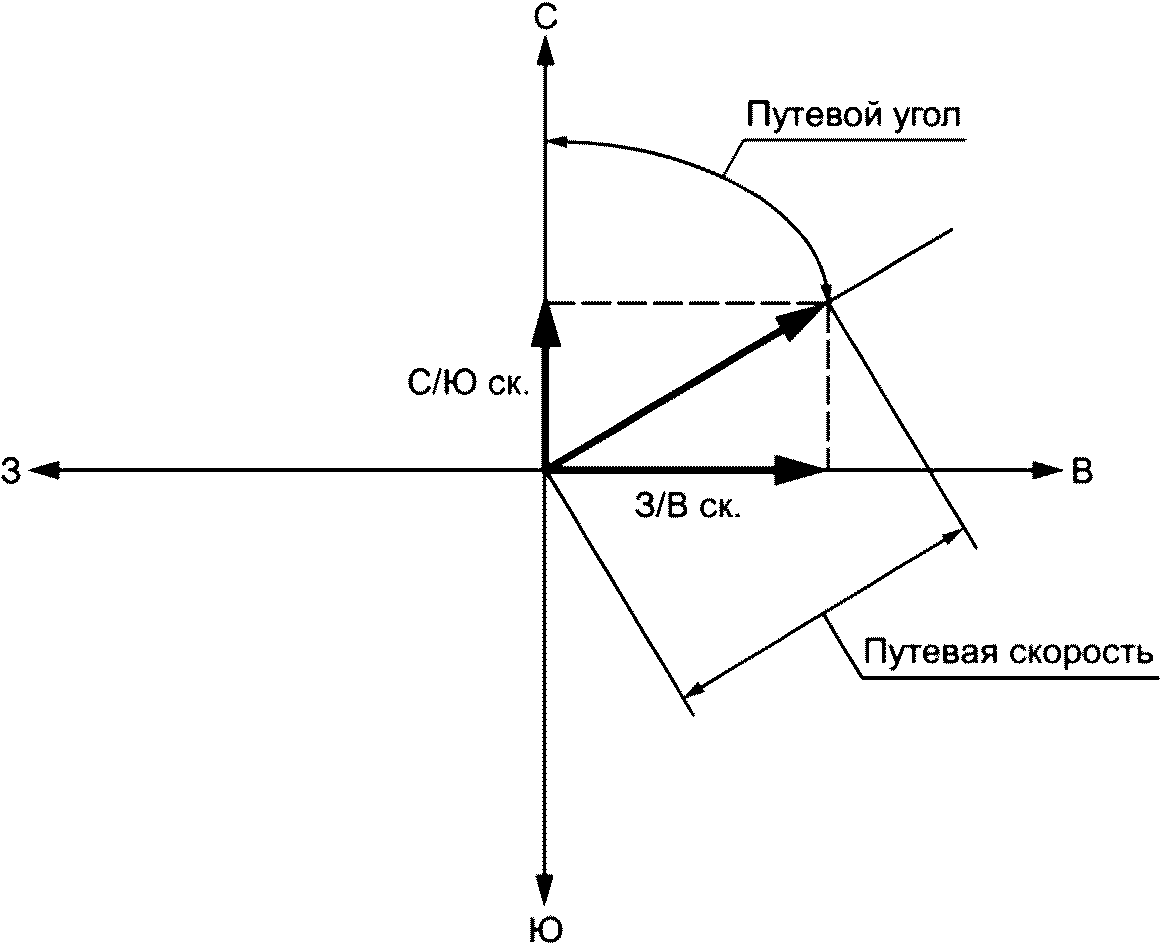
Рисунок 1 - Путевой угол
значения путевой скорости и путевого угла, записываемые в элементе данных I021/160, следует округлять до ближайшего кратного младшего значащего бита;
если значение какой-либо из составляющих скоростей "С/Ю" или "З/В" равно "1023", то поле RE (превышение диапазона, бит 32) в элементе данных I021/160 должно быть равным 1, а поля "Путевая скорость" и "Путевой угол" следует вычислять согласно приведенным выше правилам.
I021/170 Идентификация цели:
биты с 48 до 1 элемента данных I021/170 должны быть равны битам с 9 по 56, содержащимся в последнем сообщении "Идентификация ВС и тип", полученном от цели;
данные идентификации цели должны включаться в донесение ASTERIX cat. 021 только в том случае, когда сообщение "Идентификация ВС и тип" было принято.
I021/200 Статус цели
значение подполя "Статус приоритета" (биты 5 - 3) в поле I021/200 должно определяться из последнего принятого сообщения расширенного сквиттера "Статус ВС" (подтип 1, FTC = 28) или сообщения "Состояние и статус цели" (подтип 0, FTC = 29, только для целей с MOPS версии 1);
значение подполя "Статус приоритета" элемента данных I021/200 должно быть эквивалентно значению "Аварийное положение/Статус приоритета" из последнего сообщения (FTC = 28 или 29);
для целей с дублированными адресами ИКАО значение параметра "Статус приоритета" в поле I021/200 должно принимать значение 0;
значение параметра "Статус наблюдения" (биты 2 - 1) в поле I021/200 должно быть эквивалентно значению параметра "Статус наблюдения", содержащемуся в последнем принятом сообщении о местоположении ВС в воздухе;
значение параметра "Флаг изменения намерения" (бит 8) в поле I021/200 должно быть эквивалентно значению параметра "Флаг изменения намерения" (бит 9, поля ME), содержащемуся в последнем принятом сообщении "Скорость в воздухе" (подтип 1 - 4, FTC = 19);
для целей MOPS версии 2 бит 7 в донесениях ASTERIX cat. 021 должен устанавливаться в 1, когда режим LNAV не используется.
I021/210 Версия MOPS
поле "Версия не поддерживается" (бит 7) в поле I021/210 должно принимать значение 0, если состояние версии цели - назначенная MOPS версии 0, подтвержденная MOPS версии 0, 1 или 2, в остальных случаях поле "Версия не поддерживается" должно принимать значение 1;
поле "Номер версии" (VN) (биты 6 - 4) в поле I021/210 должно принимать следующие значения:
0, если состояние MOPS версии цели - назначенная MOPS версии 0 или подтвержденная MOPS версии 0;
1, если состояние MOPS версии цели - подтвержденная MOPS версии 1;
2, если состояние MOPS версии цели - подтвержденная MOPS версии 2;
поле "Номер версии" должно принимать значение, указанное в последнем сообщении "Эксплуатационный статус ВС" (FTC = 31, биты 41 - 43 поля ME), если полю "Версия не поддерживается" присвоено значение 1;
для целей с дублированными адресами ИКАО значение поля "Номер версии" в I021/210 должно принимать значение 0;
поле "Тип ЛПД" (биты 3 - 1) в I021/210 должно принимать значение 2 (1090ES).
I021/260 Донесение о рекомендации БСПС по предотвращению столкновения:
система АЗН-В должна передавать данные о RA, содержащиеся в сообщении типа 28, подтип 2, от цели MOPS версии 2, в элементе данных I021/260.
I021/271 Возможности и характеристики наземных целей:
значения битов подполей элемента данных I021/271 должны быть аналогичными значениям соответствующих битов подполей в сообщении расширенного сквиттера;
элемент данных I021/271 должен быть исключен, если FTC = 31 недоступен;
если параметр "GPS antenna offset" подполя "OM Code" в сообщении "Эксплуатационный статус ВС" установлен в значение 1, параметр POA в элементе данных I021/271 должен принимать значение 1;
если параметр "GPS antenna offset" подполя "OM Code" в сообщении "Эксплуатационный статус ВС" не установлен в значение 1, параметр POA в элементе данных I021/271 должен принимать значение 0;
первое расширение элемента данных должно формироваться, если в поле Length&Width MOPS версии 2 закодировано любое значение, отличное от значения "нет данных или неизвестно".
I021/295 Возраст данных:
система АЗН-В должна включать в I021/295 возраст данных всех элементов со статусом "обязательный" (M) до тех пор, пока по ним доступна информация;
система АЗН-В должна включать в I021/295 возраст данных всех элементов со статусом "условный" (C) до тех пор, пока по ним доступна информация;
если возраст данных превышает или равен 25,5 с, то система АЗН-В должна кодировать в элементе данных I021/295 возраст соответствующих данных всеми единицами.
I021/REF-BPS Настройка барометрического давления:
элемент данных I021/REF-BPS включает настройку барометрического давления, передаваемую ВС MOPS версии 2 в подполе "Настройка барометрического давления" в сообщении "Состояние и статус цели" (FTC = 29, подтип 1, ME биты 21 - 29) в соответствии с таблицей:
Заполнение элемента данных I021/REF-BPS
| "Состояние ВС и статус" (FTC = 29, подтип 1) | I021/REF-BPS | |||
|---|---|---|---|---|
| Параметр | Биты ME | Биты сообщения | Параметр | Биты |
| BPS | 21 - 29 | 53 - 61 | BPS | 12 - 1 |
элемент данных I021/REF-BPS должен быть включен в донесение, если для целей версии 2 поле "Настройка барометрического давления" имеет любое значение, отличное от 0;
поле "Настройка барометрического давления" в сообщениях АЗН-В в случае MOPS версий 0 и 1 не передается, поэтому элемент данных I021/REF-BPS в этом случае не должен включаться в донесение.
I021/REF-SelH:
элемент данных I021/REF-SelH должен содержать "Установленный курс ВС", передаваемый в сообщениях "Состояние и статус цели" (FTC = 29) и определяемый, либо относительно истинного или магнитного севера в соответствии с битом HDR в сообщении "Эксплуатационный статус ВС" (FTC = 31) для MOPS версий 1 и 2;
элемент данных I021/REF-SelH должен быть исключен из донесения в случае MOPS версии 0;
если для целей, осуществляющих передачу сообщений расширенного сквиттера MOPS версии 1, параметр "Горизонтальные данные доступны/Индикатор источника" (FTC = 29, подтип 0, биты 26 - 27 поля ME) принимает значение 0, элемент данных I021/REF-SelH не должен включаться в состав донесения;
если для целей, осуществляющих передачу сообщений расширенного сквиттера MOPS версии 1, параметр "Горизонтальные данные доступны/Индикатор источника" (FTC = 29, подтип 0, биты 26 - 27 поля ME) принимает значение 1, элемент данных I021/REF-SelH должен быть равен:
SelH = (установленный курс в десятичном формате; биты 28 - 36 ME) * 29/360;
если для целей, осуществляющих передачу сообщений расширенного сквиттера MOPS версии 2, параметр "Статус заданного курса" (FTC = 29, подтип 1, бит 30 поля ME) принимает значение 0, поле I021/REF-SelH не должно включаться в состав донесения.
если для целей, осуществляющих передачу сообщений расширенного сквиттера MOPS версии 2, параметр "Статус заданного курса" (FTC = 29, подтип 1, бит 30 поля ME) принимает значение 1, элемент данных I021/REF-SelH должен быть равен:
SelH = (биты 31 - 39 поля ME);
для целей версий 1 и 2 поле HDR должно заполняться из соответствующего поля полученного сообщения "Эксплуатационное состояние ВС".
I021/REF-GAO Смещение антенны GPS:
элемент данных I021/REF-GAO должен включаться в состав донесения для целей, осуществляющих передачу сообщений расширенного сквиттера MOPS версии 2. Значение элемента данных заполняется информацией из сообщения "Эксплуатационный статус ВС" (FTC = 31, подтип 1, биты 33 - 40 BDS регистра 6,5).
2.9.2. Правила сборки донесений ASTERIX cat. 025
минимальный состав донесения о состоянии услуги и Системы АЗН-В (ASTERIX cat. 025) должен соответствовать таблице:
| Элемент | Описание | Примечания |
|---|---|---|
| I025/000 Тип сообщения | Донесения о статусе услуги и системы АЗН-В | Не изменяется |
| I025/010 Идентификатор источника данных | SAC и SIC источника данных АЗН-В | Настраивается для каждой услуги |
| I025/015 Идентификатор услуги | Идентификация услуги, предлагаемая получателям этого донесения | Устанавливается настройкой каждой услуги |
| I025/070 Метка времени | Метка времени UTC, соответствующая времени передачи донесения | Из источника времени UTC системы АЗН-В |
| I025/100 Статус услуги | Статус услуги и системы АЗН-В | Определяется в соответствии с установленным режимом услуги АЗН-В и ее текущим состоянием |
в донесениях о статусе услуги и системы АЗН-В должно устанавливаться значение 1 в поле Report Type элемента данных I025/000;
в донесениях о статусе услуги и системы АЗН-В должно устанавливаться значение 0 в поле RG элемента данных I025/000;
значения параметров идентификации источников данных SIC и SAC, передаваемые в донесениях о статусе услуги и системы АЗН-В, в элементе данных I025/010 должны соответствовать значениям, заданным пользователем;
в донесениях о статусе услуги и системы АЗН-В значения идентификации источника наблюдения SIC и SAC должны быть представлены как двоичные целые числа без знакав;
значение параметра идентификации услуги SID, передаваемого в элементе данных I025/015, должно соответствовать значению, заданному пользователем;
младшие значимые 8 битов SID, передаваемые в элементе данных I025/015, должны быть равны значению параметра SID, передаваемому в донесениях о цели АЗН-В;
элемент данных I025/070 должен содержать время передачи текущего донесения ASTERIX с точностью +/- 30 мс относительно UTC;
когда услуга АЗН-В находится в состоянии "Отказ", в полях SSTAT и NOGO элемента данных I025/100 должно быть установлено значение 1;
когда услуга АЗН-В находится в режиме "Работа", в поле OPS в элементе данных I025/100 должно быть установлено значение 0;
когда услуга АЗН-В находится в режиме "Регламент", в поле OPS элемента данных I025/100 должно быть установлено значение 2 (режим "Регламент"), а в поле NOGO - значение 1;
когда услуга АЗН-В находится в состоянии "Норма" и нет отказов компонентов, а также услуга находится в режиме "Работа", то в поле SSTAT элемента данных I025/100 должно быть установлено значение 0 (режим "Работа"), а в поле NOGO - значение 0;
когда услуга АЗН-В находится в состоянии "Работа", но присутствует один или несколько отказов компонентов, то в поле SSTAT элемента данных I025/100 должно быть установлено значение 2 ("Ухудшение"), а в поле NOGO - значение 0;
система АЗН-В должна исключать элемент данных I025/105, если отказы компонентов не выявлены.
ПРИЛОЖЕНИЕ № 9
к Правилам (п. 16.3)
Требования к системе визуального наблюдения (СВН)
1. Состав системы визуального наблюдения:
а) автономный модуль наблюдения, включающий:
стационарные ТВ камеры с фиксированным угловым полем зрения и фиксированным фокусным расстоянием для формирования панорамного изображения;
стационарные ИК камеры с фиксированным угловым полем зрения и фиксированным фокусным расстоянием для формирования панорамного изображения (опционально);
стационарные ТВ камеры с фиксированным угловым полем зрения и фиксированным фокусным расстоянием для формирования детального изображения интересующих зон;
стационарные ИК камеры с фиксированным угловым полем зрения и фиксированным фокусным расстоянием для формирования детального изображения интересующих зон (опционально);
совмещенные ТВ и ИК PTZ-камеры для формирования детального изображения выбранных зон и/или объектов;
б) аппаратура передачи данных в составе:
управляемые коммутаторы с поддержкой режима многоадресного вещания Multicast оптическими интерфейсами и скоростью передачи не менее 1 Gbit/sec;
маршрутизаторы, программно-аппаратные комплексы защиты информации;
комплект кабелей для передачи данных;
в) аппаратура обработки и отображения информации, состоящая из:
автоматизированного рабочего места диспетчера ОВД:
рабочая станция, клавиатура, манипулятор мышь;
панель сенсорная со средствами (органами) управления камерами и режимами отображения, совмещенная с индикатором детального отображения объектов (видео от совмещенной ТВ/ИК PTZ-камеры);
индикатор для детального отображения объектов (видео от совмещенной ТВ/ИК PTZ-камеры, видео от стационарных ТВ/ИК камер для формирования детального изображения интересующих зон) (опционально);
группового оборудования, включающего:
средства обработки и хранения данных;
средства контроля и управления оборудованием АРМ, АМН и аппаратуру передачи данных;
средства для отображения панорамного изображения контролируемой области наблюдения в формате "вид из окна" (далее - видеопанорама) с размещением либо на рабочем месте диспетчера (индивидуальная панорама) либо на стене (коллективная панорама);
АРМ системы технического контроля и управления, администрирования и воспроизведения регистрируемой видеоинформации.
Примечание: Количество рабочих мест, состав средств отображения информации на конкретном диспетчерском пункте определяется техническим заданием на оснащение объекта;
г) комплект запасного имущества и принадлежностей и комплект инструментов и принадлежностей;
д) комплект эксплуатационной документации;
е) источники бесперебойного питания (опционально).
2. Тактико - технические требования к СВН
2.1 СВН должна обеспечивать наблюдение в условиях видимости CAVOK. Если метеорологическая оптическая дальность или высота нижней границы облачности устанавливают расстояния видимости меньше, чем расстояние до указанной зоны, то расстояние обнаружения или распознавания объекта принимается равным фактическому расстоянию видимости.
Примечание: CAVOK - метеорологические условия, при которых горизонтальная видимость у поверхности земли 10 км и более; нет облаков ниже 1500 м (5000 футов) и отсутствуют кучево-дождевые облака; нет осадков, грозы, пыльной или песчаной бури, приземного тумана, пыльного, песчаного или снежного поземка.
2.2 СВН должна обеспечивать отображение следующих видов изображений:
панорамное изображение видимого телевизионного диапазона (ТВ);
панорамное изображение инфракрасного (ИК) диапазона;
изображение видимого (ТВ) диапазона, обеспечивающее детализированный просмотр произвольной области аэродрома [выполняет функцию бинокля в видимом (ТВ) диапазоне];
изображение ИК диапазона, обеспечивающее детализированный просмотр произвольной области аэродрома (выполняет функцию бинокля в ИК диапазоне);
изображение видимого (ТВ) диапазона для детального просмотра определенных, фиксированных, зон панорамы;
изображение ИК диапазона для детального просмотра определенных, фиксированных, зон панорамы
2.3 Задачи, решаемые системой СВН
СВН на основе обработки информации от средств (источников) оптико-электронного наблюдения (далее - камеры), входящих в состав СВН, должна обеспечивать выполнение функций, связанных с визуальным наблюдением при осуществлении аэродромного диспетчерского обслуживания с дистанционного ДП.
СВН решает следующие задачи:
замена вида из окна диспетчерского пункта целостным отображением контролируемой области наблюдения на видеопанораме, позволяющей диспетчеру обнаруживать, распознавать объекты наблюдения;
Примечание: Объекты наблюдения - ВС, транспортные средства, человек, животные;
отображение участка контролируемой области наблюдения в отдельном окне на видеопанораме или на отдельном индикаторе в увеличенном масштабе изображения, позволяющее диспетчеру распознавать объект наблюдения посредством наведения PTZ-камеры и слежения за ним в ручном или автоматическом режиме;
отображение в отдельном окне на видеопанораме или на отдельном индикаторе нескольких заранее предустановленных участков контролируемой области наблюдения посредством использования стационарных ТВ/ИК камер для формирования детального изображения, позволяющее диспетчеру дополнительно сфокусировать внимание на обнаружении и распознавании объектов наблюдения в "точках повышенного внимания";
документирование и воспроизведение информации видеонаблюдения, состояния СВН, действий диспетчеров ОВД и инженерно-технического персонала.
2.4 Требования по надежности и долговечности
Средний срок службы СВН до списания или полной выработки ресурса должен быть не менее 10 лет.
Оборудование систем обработки и хранения информации, сетевое оборудование и аппаратура передачи данных должны поддерживать технологию "горячей" замены.
Должно быть предусмотрено автоматическое переключение с отказавших зарезервированных (дублированных, при наличии) функциональных элементов на резервные, а также ручное переключение на резервное с помощью средств технического управления и контроля.
Время запуска отдельного модуля (сервера, дискового массива, сетевого оборудования, аппаратуры обработки и отображения рабочего места) после включения электропитания не должно превышать 6 мин.
Время начала отображения видеоинформации на АРМ после начального включения электропитания всех модулей (серверов и рабочих мест) не должно превышать 7 мин.
Время перезапуска отдельного АРМ после команды на перезапуск не должно превышать 6 мин, сервера и сетевого оборудования - не более 8 мин.
Оборудование СВН должно обеспечивать следующие характеристики надежности и долговечности:
средний ресурс - не менее 80 000 ч;
среднее время наработки на отказ - не менее 10 000 ч;
среднее время восстановления (без учета времени доставки ЗИП) - не более 60 мин;
гарантийный срок эксплуатации - не менее 1 года.
Примечания:
1 Под отказом понимается:
- отсутствие видеоинформации, обеспечивающей решение задач, реализуемых на средствах отображения в течение времени более 2 с;
- нарушение целостности изображения в течение времени более 2 с;
- невыдерживание установленного времени автономной работы СВН;
- задержка обработки, передачи и отображения данных видеонаблюдения от реального времени на время более 1,0 с.
Не является отказом СВН отказ, вызванный отказом средств, не входящих в состав СВН.
2 Под временем восстановления понимаются все корректирующие действия по техническому обслуживанию, как то: демонтаж, замена, регулировка, соответствующие функциональные проверки и перезапуск. При замене типового элемента замены (ТЭЗ) СВН не должна требовать участия специалистов завода-изготовителя для корректировки изображения.
2.5 Конструкция АМН должна обеспечивать работу, защиту (очистку) ТВ, ИК и PTZ-камер от загрязнений, в том числе от дождя, пыли, песка, налипания снега, и предотвращать обледенение.
СВН должна обеспечивать видеонаблюдение и отображение информации в следующих режимах:
режим панорамного наблюдения - видеонаблюдение и отображение панорамного изображения аэродрома в пределах контролируемой области наблюдения в формате "вид из окна" для решения задач обнаружения, распознавания и захвата на автосопровождение объектов наблюдения.
Примечание: Автосопровождение - функция системы визуального наблюдения на основе поступающего видеоизображения от ТВ/ИК камер формирования панорамного изображения обнаруживать, маркировать и непрерывно сопровождать обнаруженные цели в автоматическом режиме в контролируемой области наблюдения;
режим детального наблюдения (PTZ-камера) - видеонаблюдение и отображение детального изображения с помощью PTZ-камеры - для решения задачи обнаружения, распознавания и непрерывного автоматического слежения за выбранным объектом наблюдения или поочередного наблюдения за объектами наблюдения в нескольких заранее предустановленных участках контролируемой области наблюдения (контроль точек повышенного внимания).
Примечание: Слежение - автоматический режим управления PTZ-камерой, позволяющий обеспечивать оптимальное непрерывное изображение объекта наблюдения, стоящего неподвижно или находящегося в движении на соответствующем индикаторе;
режим детального наблюдения (стационарные ТВ/ИК камеры для формирования детального изображения интересующих зон) - видеонаблюдение и одновременное отображение на отдельном индикаторе детальных изображений нескольких заранее определенных участков контролируемой области наблюдения с помощью стационарных ТВ/ИК камер детального изображения - для решения задачи быстрого обнаружения объектов наблюдения в "точках повышенного внимания".
СВН должна обеспечивать обработку и отображение данных видеонаблюдения в реальном масштабе времени, при этом максимальная задержка отображения данных от источников информации (камер) должна составлять не более 1,0 с.
При пропаданиях или задержках отображения информации наблюдения от любой из камер АМН на время более 1,0 с вместо изображения от соответствующей камеры должна выводиться предупреждающая информация. Сигнализация о неисправности должна выводиться на экран АРМ средств технического управления и контроля. Время от возникновения отказа до отображения информации о нем не должно превышать 2 с.
СВН должна обладать открытой модульной архитектурой с возможностью наращивания программно-аппаратных средств и решаемых функциональных задач, в том числе подключения дополнительных камер для формирования детального изображения.
Оборудование СВН должно обеспечивать сохранение ранее заданного состояния управляемых и контролируемых объектов в случае отказа аппаратуры СТКУ и переключения источников электроснабжения.
2.6 Требования к средствам оптико-электронного наблюдения
Зона видимости ТВ и/или ИК в режиме панорамного наблюдения должна составлять:
по горизонтали (по азимуту) до 360°;
по вертикали (по углу места) - от 10° до 60°.
Зона обзора (зона наведения) ТВ и ИК PTZ-камер должна составлять:
по горизонтали (по азимуту) - 360°;
по вертикали (по углу места) - не менее +/- 40 градусов от линии горизонта.
Камеры АМН должны иметь характеристики:
ТВ-камеры - кадровую частоту не менее 25 кадров/с;
ТВ-камеры - разрешение не хуже 1920 x 1080 пикселей;
ИК-камеры - кадровую частоту не менее 5 кадров/с;
ИК-камеры - разрешение не хуже 640 x 480 пикселей;
автоматическая фокусировка PTZ-камер;
скорость перемещения PTZ-камеры по азимуту и углу места - не менее 60°/с;
время реакции PTZ-камеры на действия оператора - не более 250 мс.
Индикаторы АРМ и коллективных панорамных средств отображения из состава СВН должны иметь разрешение не хуже 1920 x 1080 пикселей.
Размещение АРМ и коллективных панорамных средств отображения из состава СВН должно соответствовать требованиям СанПиН к оборудованию рабочего места ОВД.
2.7 Требования к характеристикам видеонаблюдения
С АМН должна быть обеспечена прямая видимость контролируемой области наблюдения.
СВН в режиме панорамного наблюдения должна обеспечивать отображение на видеопанораме всей контролируемой области наблюдения:
площадь маневрирования аэродрома, включая боковые полосы безопасности (БПБ) и концевые полосы безопасности (КПБ);
воздушное пространство над ВПП не менее 200 футов;
перроны;
глиссады посадочных курсов;
другие участки, визуальный обзор которых необходим органу ОВД.
На видеопанораме в секторе каждой из глиссад посадочных курсов СВН должна обеспечивать:
обнаружение ВС, летящего на удалении 4000 м от порога ВПП;
распознавание ВС, летящего на удалении 1000 м от порога ВПП.
На панели сенсорной PTZ-камеры СВН должна обеспечивать:
распознавание ВС, летящего на удалении 4000 м от порога ВПП;
обнаружение на удалении 14 000 м от места установки АМН.
В режиме панорамного изображения обнаружение и распознавание человека и животного должно обеспечиваться на дальности не менее 350 (500) м от местоположения АМН с обеспечением максимальной зоны видимости модуля наблюдения по вертикали до 30° (до 15°).
Классы и размеры объекта наблюдения:
крупный ВС (например, B757-200) - 14 x 38 x 47 (в x ш x д, м);
средние ВС (например, ATR-42/АН-24) - 8 x 23 x 25 (в x ш x д, м);
малогабаритные ВС (например, Л410) - 6,0 x 19,9 x 15,0 (в x ш x д, м);
очень легкие самолеты (например, Aquila A 210/АН2) - 2,3 x 10 x 7 (в x ш x д, м);
планер (например, ASW 28) - 1 x 15 x 7 (в x ш x д, м);
воздушный шар (например, 2800 м3 - 23 x 18 (в x ш, м);
человек, животные - 2 x 0,5 x 0,5 (в x ш x д, м);
транспортное средство - 1,5 x 1,8 x 4,0 (в x ш x д, м);
препятствие - 1 x 1 x 1 (в x ш x д, м).
При освещении камер фарами ТС или ВС длительность "засветки" не должна превышать 2 с после прекращения освещения камер фарами ТС (ВС).
В СВН должны применяться меры по обеспечению необходимого качества отображения информации видеонаблюдения в условиях попадания прямого или отраженного солнечного света в объективы ТВ стационарных камер и ТВ PTZ-камер («засветки»).
2.8 Требования к средствам обработки и хранения информации
Средства обработки и хранения информации СВН должны включать внутренний источник единого времени, а также иметь возможность получения сигналов единого времени от внешнего источника для обеспечения компонентов СВН метками точного времени в формате NTP.
Должна обеспечиваться синхронизация внутреннего системного времени СВН с всемирным координированным временем (UTC) по сигналам глобальных навигационных спутниковых систем (ГНСС): ГЛОНАСС или ГЛОНАСС в комбинации с другими созвездиями ГНСС. При использовании для синхронизации сигналов нескольких созвездий ГНСС должна быть обеспечена возможность ручного выбора синхронизации СВН только по сигналам ГЛОНАСС.
В СВН должны обеспечиваться регистрация и хранение в течение не менее 30 суток:
видеоинформации, поступающей от камер АМН (с частотой регистрации не менее 5 кадр/с);
видеоинформации, обработанной СВН и отображаемой на рабочих местах диспетчера (в виде копий экранов с частотой регистрации не менее 1 кадр/с);
действия диспетчера ОВД и инженерно-технического персонала, связанные с просмотром, вводом и корректировкой информации;
информации о конфигурации и текущем состоянии СВН.
В СВН должна быть обеспечена возможность воспроизведения (с привязкой к временным меткам) любого выбранного фрагмента зарегистрированной информации видеонаблюдения и информации о конфигурации и текущем состоянии СВН на рабочем месте технического персонала. Рекомендуется обеспечить возможность воспроизведения (с привязкой к временным меткам) любого выбранного фрагмента зарегистрированной информации видеонаблюдения на рабочем месте пользователя (диспетчера ОВД).
В СВН должна быть предусмотрена возможность записи выбранного фрагмента зарегистрированной информации видеонаблюдения на съемный носитель в стандартном формате (AVI, MPEG, DivX и др.) для воспроизведения на персональном компьютере.
Должна быть исключена возможность изменения информации, зарегистрированной средствами СВН.
Средства обработки и хранения данных должны иметь 100%-ный резерв.
Должен быть обеспечен резерв производительности средств обработки и хранения данных не менее 30%.
2.9 Требования к средствам отображения информации видеонаблюдения на рабочих местах пользователей СВН
В режиме панорамного наблюдения СВН должна обеспечивать следующие характеристики отображения:
вывод изображения от стационарных ТВ-камер (ИК при наличии) с фиксированным угловым полем зрения и фиксированным фокусным расстоянием для формирования бесшовного отображения контролируемой области наблюдения;
вывод фрагмента изображения от стационарной камеры с увеличенным фиксированным фокусным расстоянием;
отображение видео от совмещенной ТВ/ИК PTZ-камеры на панели сенсорной - и дублироваться в отдельном окне видеопанорамы либо на отдельном индикаторе.
В режиме детального наблюдения должен обеспечиваться вывод изображения с совмещенной ТВ/ИК PTZ-камеры на индикаторы из состава СВН (АРМ, индивидуальных или коллективных панорамных средств отображения).
Кадровая частота изображения панорамных индикаторов и индикаторов детального обзора рабочих мест пользователей должна быть не менее 15 кадров/с. Рекомендуемая кадровая частота изображения панорамных индикаторов и индикаторов детального обзора рабочих мест пользователей не менее 20 кадров/с.
Индикаторные устройства, входящие в состав оборудования рабочих мест пользователей СВН, должны обеспечивать качество отображения информации (яркость, контрастность), позволяющее выполнять обнаружение и распознавание объектов наблюдения пользователем.
Примечание: Отображение движущихся объектов не должно приводить к потере целостности изображения (раздвоение, разрыв) или раздвоенного отображения цели.
Групповое оборудование и оборудование рабочих мест пользователей
СВН должны обеспечивать возможность вывода визуальной и звуковой сигнализаций событий об отказах на оборудовании СВН, а также при потере/захвате на автосопровождение целей, находящихся в контролируемой области наблюдения (потерей сопровождения объекта, началом движения, выездом их в специально обозначенные запретные зоны и др.).
Примечание: Функция звукового воспроизведения предусматривает выбор события, для которого устанавливаются звуковое оповещение, громкость каждого из оповещений, выбор сигнала, возможность регулировки громкости звука до полного его отключения. При отключенном звуке на видеопанораме и на рабочих местах пользователей СВН должен отображаться соответствующий индикатор.
Во всех режимах наблюдения должны отсутствовать искажения и дрожания изображения, не позволяющие выполнять обнаружение и распознавание объектов наблюдения пользователем.
2.10 Требования к средствам передачи данных
Средства передачи данных от АМН до средств обработки и хранения данных должны иметь 100%-ный резерв.
Средства передачи данных должны обеспечивать пропускную способность по линиям связи не менее 1 Гбит/с.
2.11 Требования к составу функциональных возможностей СВН
В части управления отображением СВН должна обеспечивать:
представление на видеопанораме панорамного вида из окна ДП целостным отображением контролируемой области наблюдения;
автоматическую электронную регулировку (программными средствами) яркости и контрастности изображения с возможностью ручной регулировки и запоминания нескольких предустановленных уровней;
возможность отображения синтетического оконтуривания по границам элементов рабочей площади и стационарных объектов аэродрома (ВПП, РД, средства РТОП и объектов служебной технической застройки и др.) и размещения их символьного обозначения;
вывод выбранного фрагмента панорамного изображения с цифровым увеличением на средства отображения из состава АРМ;
возможность оперативного управления PTZ-камерами с помощью средств (органов) управления, отображаемых на индикаторе АРМ (мини-панорама и другие элементы, упрощающие процедуры наведения PTZ-камеры на выбранную зону или объект);
возможность автоматического наведения PTZ-камеры на выбранный объект наблюдения и автоматического слежения за ним и его перемещениями с непрерывным отображением его детального изображения;
автоматическое сопровождение движущихся объектов наблюдения в пределах контролируемой области наблюдения с возможностью установки настроек предупреждений, связанных с их местоположением и движением;
формирование дополнительного изображения участка контролируемой области наблюдения от стационарной ТВ-камеры детального изображения с фиксированным угловым полем зрения и фиксированным фокусным расстоянием;
размещение нескольких дополнительных изображений участков области наблюдения от стационарных ТВ-камер детального изображения на одном индикаторе из состава АРМ;
возможность оперативного переключения с АРМ диспетчера ОВД (нажатием кнопки на индикаторе рабочего места для детального отображения объектов) между изображениями, формируемыми от ТВ- и ИК-камер (на PTZ с ТВ на ИК и обратно) с совмещением местоположения, ракурса, масштаба изображения, направления движения с одного типа камер на другой;
одновременное отображение одного и того же изображения на различных рабочих местах пользователей (диспетчеров обслуживания воздушного движения).
2.12 Требования к средствам технического управления и контроля
Средства технического управления и контроля работоспособности СВН должны обеспечивать:
непрерывный контроль технического состояния оборудования до уровня ТЭЗ и каналов связи независимо от операций, совершаемых на СТКУ;
автоматическую индикацию текущей конфигурации СВН, изменений технического состояния и режимов работы оборудования;
сигнализацию об отказах и сбоях в работе средств комплекса и каналов передачи данных;
автоматическое переключение на резерв камеры средств обработки и хранения информации и средств передачи данных при отказах зарезервированных элементов;
ручную реконфигурацию средств обработки и хранения информации, средств передачи данных, камеры и автоматизированных рабочих мест пользователей;
выдачу сигнала при переходе на работу от источника бесперебойного питания.
Средства технического управления и контроля СВН должны иметь 100%-ный резерв.
2.13 Требования к человеко-машинному интерфейсу
Все АРМ диспетчеров ОВД должны иметь общие функциональные возможности и единый человеко-машинный интерфейс.
Человеко-машинный интерфейс должен быть разработан с учетом особенностей технологии управления воздушным движением в России. При реализации интерфейса должны использоваться буквы латинского алфавита и/или кириллицы.
На индикаторе рабочего места для детального отображения объектов должны присутствовать средства (органы) управления режимами отображения и камерами в соответствии с .
На индикаторе рабочего места СТКУ должны присутствовать средства (органы) управления и отображения состояния СВН и ее компонентов.
ПРИЛОЖЕНИЕ № 10
к Правилам (п. 16)
Требования к всенаправленному азимутальному радиомаяку (РМА)
1. Состав оборудования азимутального радиомаяка:
передающее устройство;
антенная система;
аппаратура дистанционного управления и контроля;
источник бесперебойного питания;
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования
2.1 РМА должны излучать такие сигналы, которые позволяют обеспечивать удовлетворительную работу типовой бортовой установки на высотах и расстояниях, требующихся по причинам эксплуатационного характера, в горизонтальной плоскости от 0° до 360°, в вертикальной плоскости от 0° до 40°.
2.2 Напряженность электрического поля (плотность потока мощности) сигналов РМА и допплеровского РМА в пределах зоны действия маяка, должна быть не менее 90 мкВ/м (минус 107 дБВт/м2).
2.3 РМА и допплеровский РМА должны работать в диапазоне частот от 111,975 до 117,975 МГц с разносом частотных каналов 50 кГц.
Допуск на отклонение несущей частоты канала от присвоенной должен составлять +/- 0,002%.
2.4 Излучение радиосигналов РМА и допплеровского РМА должно быть поляризованным в горизонтальной плоскости.
Примечание: Вертикально поляризованная составляющая излучения является предельно малой.
2.5 Общая погрешность азимутальной информации о пеленге РМА и допплеровского РМА в их зоне действия, вносимая в эксплуатационную погрешность измерения азимута на борту ВС, не должна превышать +/- 2°.
2.6 Сигнал несущей частоты, принимаемый в любой точке зоны действия маяка должен быть модулирован по амплитуде следующими двумя сигналами:
поднесущей с постоянной амплитудой и частотой (9960 +/- 100) Гц, модулированной сигналом 30 Гц по частоте с индексом частотной модуляции (16 +/- 1). Фаза модулирующего сигнала частотой 30 Гц РМА не зависит от азимута (опорная фаза). Фаза модулирующего сигнала 30 Гц допплеровского РМА изменяется вместе с азимутом (переменная фаза);
модулирующим сигналом 30 Гц. В РМА фаза модулирующего сигнала 30 Гц изменяется вместе с азимутом (переменная фаза). В допплеровском РМА фаза модулирующего сигнала 30 Гц не зависит от азимута (опорная фаза).
Частоты модулирующих сигналов с переменной и опорной фазами должны составлять 30 Гц +/- 1%.
2.7 Модуляция несущей должна осуществляться поднесущей с частотой (9960 +/- 100) Гц. Глубина амплитудной модуляции должна составлять (30 +/- 2)% и регулироваться в пределах от 27% до 33%. Поднесущая должна быть модулирована по частоте сигналом частотой (30 +/- 0,3) Гц и обладать индексом модуляции (16 +/- 1).
Примечание: Коэффициент нелинейных искажений не должен превышать 3%. Любая паразитная амплитудная модуляция, обусловленная гармониками частоты 9960 Гц, не должна превышать 1%.
Модуляция несущей должна осуществляться сигналом (30 +/- 0,3) Гц. Глубина амплитудной модуляции должна составлять (30 +/- 2)% и регулироваться в пределах от 27% до 33%.
Примечание: Коэффициент нелинейных искажений не должен превышать 3%. Любая паразитная амплитудная модуляция, обусловленная гармониками частоты 30 Гц, не должна превышать 1%.
Модуляция несущей РМА должна осуществляться сигналом частотой (30 +/- 0,3) Гц.
Примечание: Мощности сигналов с боковыми частотами, смещенными на 30 Гц от частоты несущей, должны быть достаточны для обеспечения глубины пространственной амплитудной модуляции несущей сигналами переменной фазы, которая должна:
составлять (30 +/- 2)% на углах возвышения от 0° до 5°;
оставаться в пределах от 25% до 35% на углах возвышения от 5° до 20°;
оставаться в пределах от 20% до 40% на углах возвышения от 20° до 40°.
Модуляция несущей допплеровского РМА должна осуществляться сигналом частотой (9960 +/- 100) Гц.
Примечание: Мощности сигналов с боковыми частотами, смещенными на 9960 Гц от частоты несущей, должны быть достаточны для обеспечения глубины пространственной амплитудной модуляции несущей сигналами переменной фазы, которая должна:
иметь номинальное значение (30 +/- 2)% при отсутствии переотражений;
составлять 20% - 35% на углах возвышения от 0° до 5°;
оставаться в пределах от 25% до 35% на углах возвышения от 5° до 20°;
оставаться в пределах от 20% до 40% на углах возвышения от 20° до 40°.
2.8 Глубина амплитудной модуляции поднесущей РМА не должна превышать 5%.
Глубина амплитудной модуляции поднесущей допплеровского РМА, обусловленной имитацией вращения антенны, не должна превышать 40% в случае, когда она измеряется по меньшей мере на расстоянии 300 м от центральной антенны маяка.
Примечание: Функция смешивания должна быть такой, чтобы уменьшить глубину паразитной амплитудной модуляции сигнала поднесущей fн +/- 9960 Гц из-за имитации вращения до значения не более 20% в полосе +/- 500 Гц.
Глубина паразитной амплитудной модуляции поднесущей сигналом частотой 60 Гц должна быть по возможности низкой и не должна превышать 20%.
2.9 Уровни боковых полос гармоник составляющей 9960 Гц излучаемого сигнала относительно основной гармоники (при разносе каналов 50 кГц) не должны превышать:
минус 30 дБ для 2-й гармоники;
минус 50 дБ для 3-й гармоники;
минус 60 дБ для 4-й гармоники и выше.
2.10 РМА и допплеровский РМА должны обеспечивать одновременную передачу опознавательного сигнала на той же несущей частоте, которая используется для обеспечения навигационной функции. Излучение сигналов опознавания должно быть поляризовано в горизонтальной плоскости. При этом должно быть обеспечено четкое, правильное и разборчивое опознавание маяка на борту ВС.
Сигнал опознавания должен передаваться международным кодом Морзе с использованием двух или трех букв со скоростью примерно семь слов в минуту. Период повторения сигнала должен быть не менее 30 с равными интервалами в пределах этого промежутка времени. Частота тонального модулирующего сигнала должна составлять (1020 +/- 50) Гц.
Примечание: В РМА и допплеровском РМА должны быть предусмотрены возможности управления передачей опознавательного сигнала синхронизирующим сигналом от оборудования, которое взаимодействует с этим маяком.
С выполнением своей основной функции РМА и допплеровский РМА должны одновременно обеспечивать канал связи «земля - воздух» на той же несущей частоте, которая используется для обеспечения навигационной функции.
Излучение сигналов радиотелефонной связи должно быть поляризовано в горизонтальной плоскости.
Диапазон передаваемых звуковых частот должен находиться в интервале от 300 до 3000 Гц.
Неравномерность частотной характеристики канала относительно частоты 1000 Гц должна быть не более 3 дБ по всему диапазону от 300 до 3000 Гц.
Радиотелефонная связь не должна мешать обеспечению основной навигационной функции радиомаяка. При излучении сигналов радиотелефонной связи сигналы опознавания не должны подавляться.
Глубина модуляции несущей сигналом опознавания должна быть не более 10%. При этом должно быть обеспечено четкое, правильное и разборчивое опознавание маяка на борту ВС. Допускается увеличение этой глубины модуляции до 20% в тех случаях, когда не используется канал связи.
Примечание: Глубина модуляции несущей сигналом опознавания должна составлять (5 +/- 1)%, если при выполнении своей основной навигационной функции РМА обеспечивает канал связи «земля - воздух».
Пиковая глубина модуляции несущей речевыми сообщениями не должна превышать 30%.
2.11 Система автоматического контроля маяка должна отключать отказавший комплект аппаратуры и включать резервный комплект (при его наличии), а также при отказе комплекта(ов) прекращать радиоизлучение маяка и обеспечивать аварийную сигнализацию в пунктах управления в следующих случаях:
изменение более чем на +/- 1° передаваемой информации об азимуте в точке установки контрольной антенны;
уменьшение на 15% в месте расположения контрольного устройства составляющих модуляции уровня напряжения радиочастотных сигналов, либо поднесущей, либо сигналов модуляции по амплитуде с частотой 30 Гц, либо тех и других;
пропадание сигнала опознавания;
отказ аппаратуры контроля.
2.12 Средний срок службы должен составлять не менее 15 лет.
2.13 Средняя наработка на отказ должна составлять не менее 10 000 час.
2.14 Среднее время восстановления должно быть не более 30 мин.
2.15 Время переключения на резерв должно быть не более 10 с.
2.16 Сведения о эквивалентной изотропно излучаемой мощности (EIRP) и зоне действия РМА и доплеровского РМА
2.16.1 Напряженность поля, указанная в пункте 2.2, основывается на следующем:
чувствительность бортового приемника 117 дБВт;
потери в линии передачи, потери на рассогласование, изменение полярной диаграммы направленности антенны по отношению к изотропной антенне плюс 7 дБ.
Требуемая мощность в антенне 110 дБВт.
Требуемую мощность 110 дБВт получают на частоте 118 МГц при плотности мощности 107 дБВт/м2; плотность 107 дБВт/м2 эквивалентна 90 мкВ/м, т.е. плюс 39 дБ относительно 1 мкВ/м.
Примечание: Плотность мощности Pd, дБВт/м2, при использовании изотропной антенны можно вычислить следующим образом:
Pd = Pa - 10 log 2/4
2/4 ,
,
где Pa - мощность в точке приема, дБВт;
 - длина волны, м.
- длина волны, м.
2.16.2 EIRP, необходимая для получения напряженности поля 90 мкВ/м (107 дБВт/м2), указана на рисунке. Напряженность поля прямо пропорциональна диаграмме направленности антенны в вертикальной плоскости. Фактические диаграммы направленности антенн зависят от ряда факторов, таких как высота фазового центра антенны над уровнем земли (AGL), неровности поверхности, рельеф местности, удельная электропроводимость земли и противовес антенны.

Рисунок - Зависимость EIRP, необходимой для обеспечения напряженности поля 90 мкВ/м (107 дБВт/м2) от высоты над РМА и расстояния до него
Примечания:
1 В представленном инструктивном материале предполагается, что высота противовеса антенны РМА и доплеровского РМА над поверхностью земли (AGL), которая определяет диаграмму направленности антенны, составляет 3 м (AGL) на равнинной территории. Экранирующее влияние рельефа местности уменьшает обеспечиваемую дальность.
2 Передаваемая мощность, необходимая для достижения указанного значения EIRP, зависит от коэффициента усиления антенны и потере в фидере. Например, EIRP 25 дБВт может быть получена при выходной мощности РМА 100 Вт, потере в фидере 1 дБ и коэффициенте усиления антенны 6 дБ.
ПРИЛОЖЕНИЕ № 11
к Правилам (п. 17)
Требования к всенаправленному УВЧ радиомаяку дальномерному (РМД)
1. Состав оборудования дальномерного радиомаяка включает:
приемо-передающее устройство;
антенную систему;
систему контроля и дистанционного управления;
источник бесперебойного питания;
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования
2.1. Зона действия РМД должна быть:
при взаимодействии с маяком РМА не менее зоны действия маяка РМА;
при взаимодействии с оборудованием РМС или МЛС не менее зон действия оборудования РМС или МЛС.
2.2. РМД должен передавать сигнал опознавания одним из следующих способов:
«независимое» опознавание должно представлять собой передачу кодированных международным кодом Морзе опознавательных импульсов, когда РМД не взаимодействует с каким-либо навигационным средством или оборудованием точного захода на посадку РМС или МЛС;
«взаимодействующее» опознавание должно использоваться при взаимодействии РМД с другим оборудованием, обеспечивающим передачу собственных сигналов опознавания.
2.3. В тех случаях, когда взаимодействующий с РМД маяк РМА осуществляет радиотелефонную связь, «взаимодействующий» сигнал приемоответчика не должен подавляться.
2.4. Передача сигналов опознавания должна осуществляться серией спаренных импульсов с частотой повторения 1350 пар в секунду, передаваемых в течение определенного периода времени и временно заменяющих все импульсы ответа, которые передавались бы в этот временной интервал.
Если необходимо сохранить постоянный рабочий цикл РМД, через (100 +/- 10) мкс после передачи каждой пары опознавательных импульсов следует передавать пару выравнивающих импульсов, имеющих такие же характеристики, как и опознавательные импульсы.
2.5. Импульсы ответа дальности должны передаваться между периодами времени манипуляции.
2..6. Сигнал «независимого» опознавания должен передаваться со скоростью шесть слов в минуту и с периодичностью по крайней мере 40 с. Максимальная длительность включения на передачу группы опознавательного кода не должна превышать 5 с, а весь период его передачи должен быть не более 10 с.
Длительность точки должна составлять от 0,1 до 0,16 с, длительность тире должна быть в три раза больше длительности точки. Пауза между точками и/или тире должна быть равна длительности точки +/- 10%, а пауза между буквами или цифрами должна быть не менее длительности трех точек.
2.7. Сигнал "взаимодействующего" опознавания должен передаваться международным кодом Морзе и синхронизироваться с опознавательным кодом взаимодействующего средства.
Каждый 40-секундный интервал разделяется на четыре или более равных периода, и опознавательный сигнал РМД должен передаваться в течение только одного периода, а опознавательный сигнал взаимодействующего средства - в течение остальных периодов.
Для РМД, взаимодействующего с МЛС, опознавательный сигнал должен содержать последние три буквы опознавательного кода угломерного оборудования МЛС.
2.8. Ошибка измерения дальности, вносимая РМД в эксплуатационную ошибку измерения дальности на борту ВС, не должна превышать 150 м, а при взаимодействии РМД с оборудованием РМС - не более 75 м (при вероятности 0,95).
2.9. Передатчик
РМД должен обеспечивать работу в диапазоне частот от 960 до 1215 МГц с вертикальной поляризацией на любом из 252 каналов в соответствии с пунктом 2.16. Запросная и ответная частоты присваиваются с разносом каналов 1 МГц.
Выбор каналов РМД, а также спаривание каналов РМД-НП с каналами РМД/РМА, РМД/РМС, МЛС должны соответствовать требованиям, как показано в пункте 2.16.
Допуск по нестабильности частоты передатчика дальномерного радиомаяка должен находиться в пределах +/- 0,002% от значения присвоенной частоты.
Любой излучаемый передатчиком дальномерного радиомаяка импульс должен иметь следующие характеристики:
длительность импульса (3,5 +/- 0,5) мкс;
время нарастания импульса (передний фронт) не более 3 мкс;
время спада импульса (задний фронт) от 2,5 до 3,5 мкс;
мгновенное значение амплитуды импульса не падает ниже 95% максимальной амплитуды импульса в любой момент длительности импульса между точками, обозначающими 95% максимального уровня на переднем и заднем фронтах огибающей импульса;
в пределах длительности импульса эффективная излучаемая мощность в полосе частот 0,5 МГц с центральной частотой этой полосы, смещенной на +/- 0,8 МГц от значения присвоенной частоты канала, должна составлять не более 200 мВт, а при смещении центральной частоты полосы на +/- 2 МГц от значения присвоенной частоты канала - не более 2 мВт.
Эффективная излучаемая мощность в полосе частот 0,5 МГц должна монотонно уменьшаться по мере увеличения величины смещения центральной частоты от значения присвоенной частоты канала.
Интервал между импульсами, составляющими кодовые пары, должен иметь следующие значения:
каналы X - (12 +/- 0,25) мкс;
каналы Y - (30 +/- 0,25) мкс.
Пиковая эффективная излучаемая мощность передатчика дальномерного радиомаяка должна быть не менее той, которая требуется для обеспечения пиковой импульсной плотности мощности минус 89 дБВт/м2 в любой точке зоны действия.
Максимальные мощности импульсов, образующих любую импульсную пару, не должны отличаться более чем на 1 дБ.
Примечание: Для обеспечения обслуживания 100 ВС пропускная способность передатчика по ответу дальности должна обеспечивать непрерывную передачу (2700 +/- 90) пар импульсов в секунду.
Передатчик должен работать со скоростью передачи, включая беспорядочно распределенные импульсные пары и импульсные пары ответа дальности, не менее 700 импульсных пар в секунду, исключая время опознавания. Минимальная скорость передачи должна быть как можно ближе к скорости 700 пар импульсов в секунду.
Дальномерный радиомаяк должен иметь задержку ответа на запрос по времени, номинальная величина которой составляет:
50 мкс для каналов режима X;
56 мкс для каналов режима Y.
В интервалах между передачей отдельных импульсов уровень паразитной мощности в любом нерабочем канале должен быть более чем на 80 дБ ниже пикового уровня мощности импульсов в рабочем канале.
На всех частотах от 10 до 1800 МГц, исключая полосу частот от 960 до 1215 МГц, паразитное излучение передатчика не должно превышать минус 40 дБмВт в любом 1 кГц интервале ширины полосы пропускания приемника.
Эквивалентная изотропическая излучаемая мощность гармоники несущей частоты в любом рабочем канале не должна превышать минус 10 дБмВт.
2.10. Приемник
Рабочей частотой приемника должна являться запросная частота, соответствующая присвоенному рабочему каналу. Допуск по нестабильности частоты приемника РМД должен находиться в пределах +/- 0,002% от значения присвоенной частоты.
Чувствительность приемника должна быть такой, чтобы при отсутствии всех импульсных пар запроса, кроме тех, которые необходимы для измерения чувствительности приемника, обеспечивалось срабатывание приемоответчика с эффективностью не менее 70% при плотности потока пиковой мощности по крайней мере минус 103 дБВт/м2.
Характеристики приемоответчика должны сохраняться при изменении плотности мощности сигнала запроса около антенны в пределах:
от минус 93 до минус 22 дБВт/м2 - при взаимодействии РМД с РМС или МЛС;
от минус 103 до минус 35 дБВт/м2 - при применении в других целях.
Чувствительность приемника не должна изменяться более чем на 1 дБ:
при изменении его нагрузки от 0% до 90% максимальной скорости передачи;
изменении интервала между импульсами в импульсной паре на +/- 1 мкс от номинального значения.
Примечание: При нагрузке дальномерного радиомаяка более 90% максимального значения скорости передачи необходимо предусматривать автоматическое уменьшение чувствительности приемника для ограничения числа ответов. Диапазон регулируемого снижения чувствительности должен быть, по крайней мере, 50 дБ.
Для обеспечения 90% максимальной скорости передачи при значении плотности импульсной мощности сигналов запроса минус 103 дБВт/м2 импульсные пары, вызванные шумом приемника, не должны приводить к повышению скорости передачи ответных импульсов более чем на 5%.
Минимально допустимая ширина полосы частот приемника должна быть такой, чтобы при сложении уходов частот приемника и частоты сигнала запроса дальности на +/- 100 кГц уровень чувствительности не понижался более чем на 3 дБ.
Ширина полосы пропускания частот приемника должна быть достаточной для обеспечения требований точности при работе со стандартными импульсами запроса.
Дальномерный радиомаяк не должен запускаться сигналами запроса дальности, смещенными более чем на 900 кГц относительно присвоенной частоты канала, и с плотностью мощности вне пределов от минус 93 до минус 22 дБВт/м2, когда данное оборудование устанавливается вместе с системами РМС или МЛС, и вне пределов от минус 103 до минус 35 дБВт/м2 в тех случаях, когда оно устанавливается для применения в других целях.
Сигналы, поступающие на промежуточной частоте приемника дальномерного радиомаяка, должны подавляться не менее чем на 80 дБ.
Паразитные ответные сигналы в диапазоне частот от 960 до 1215 МГц и сигналы на зеркальных частотах несущей должны подавляться не менее чем на 75 дБ.
Паразитное излучение от любой части приемника РМД или связанных с ним схем в любом нерабочем канале должно быть более чем на 80 дБ ниже пикового уровня мощности импульсов в рабочем канале, и на всех частотах от 10 до 1800 МГц, исключая полосу частот от 960 до 1215 МГц, паразитное излучение передатчика не должно превышать минус 40 дБмВт в любом 1 кГц интервале ширины полосы пропускания приемника.
Дальномерный радиомаяк должен восстанавливать работоспособность через 8 мкс после приема сигнала, амплитуда которого превышает минимальный уровень чувствительности приемника на 60 дБ при условии, что уровень полезного сигнала лежит в пределах 3 дБ от значения, соответствующего отсутствию сигнала.
Дешифратор приемника должен подавлять кодовую пару запросчика с интервалом между импульсами пары, отличающимся на +/- 2 мкс или более от номинального, и с любым по величине уровнем сигнала в пределах от минус 93 до минус 22 дБВт/м2, когда данное оборудование устанавливается вместе с системами РМС или МЛС, и вне пределов от минус 103 до минус 35 дБВт/м2в тех случаях, когда оно устанавливается для применения в других целях. При этом скорость передачи РМД не должна превышать значения, полученного при отсутствии запросных импульсов.
Приемник должен запираться на время не более 60 мкс после декодирования действительного запроса.
2.11. Контроль
Система автоматического контроля дальномерного радиомаяка должна отключать отказавший комплект аппаратуры и включать резервный комплект (при его наличии), а также при отказе обоих комплектов прекращать радиоизлучение и обеспечивать аварийную сигнализацию в пунктах управления (за время: не более 10 с для РМД, используемого в целях навигации, и не более 1 с для РМД, взаимодействующего с РМС и МЛС) в следующих случаях:
задержка запросных импульсов в РМД изменилась более чем на +/- 1 мкс (навигация) и +/- 0,5 мкс (посадка);
временной интервал между импульсами ответа дальности изменился более чем на +/- 1 мкс;
излучаемая приемоответчиком мощность уменьшилась на 3 дБВт и более;
произошел отказ аппаратуры контроля.
Примечание: Контрольное устройство должно также обеспечивать соответствующую индикацию в пункте управления любого из следующих условий:
уменьшение выходной мощности РМД на 3 дБ и более;
уменьшение минимального уровня чувствительности приемника РМД на 6 дБ и более (в том случае, если это не обусловлено действием схемы автоматического снижения усиления приемника);
интервал между первым и вторым импульсами ответной импульсной пары РМД отличается на 1 мкс или более от обычной величины (12 +/- 0,25) мкс для канала X и (30 +/- 0,25) мкс для канала Y;
изменение частот приемника и передатчика РМД, приводящее к использованию частот, выходящих за пределы диапазона управления эталонными схемами (если рабочие частоты не задаются непосредственно кварцевой стабилизацией).
Ни для целей контроля, ни для целей автоматической регулировки частоты, ни для того и другого вместе запуск РМД не должен производиться чаще, чем 120 раз в секунду.
2.12. Средний срок службы должен составлять не менее 15 лет.
2.13. Средняя наработка на отказ должна составлять не менее 10 000 час.
2.14. Среднее время восстановления должно быть не более 30 мин.
2.15. Время переключения на резерв должно быть не более 10 с.
2.16. Таблица спаривания каналов РМД с каналами РМД/РМА, РМД/РМС, МЛС
Спаривание каналов РМД с каналами РМД/РМА, РМД/РМС, МЛС приведено в таблице.
| Спаривание каналов | Параметры РМД | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Номер канала РМД | Частота РМА/РМС, МГц | Частота МЛС, МГц | Номер канала МЛС | Запрос | Ответ | ||||
| Частота, МГц | Импульсные коды | Частота, МГц | Импульсные коды, мкс | ||||||
| РМД, мкс | Режим дальномерного элемента МЛС, мкс | ||||||||
| ИА | ФА | ||||||||
| 1X | - | - | - | 1025 | 12 | - | - | 962 | 12 |
| 1Y | - | - | - | 1025 | 36 | - | - | 1088 | 30 |
| 2X | - | - | - | 1026 | 12 | - | - | 963 | 12 |
| 2Y | - | - | - | 1026 | 36 | - | - | 1089 | 30 |
| 3X | - | - | - | 1027 | 12 | - | - | 964 | 12 |
| 3Y | - | - | - | 1027 | 36 | - | - | 1090 | 30 |
| 4X | - | - | - | 1028 | 12 | - | - | 965 | 12 |
| 4Y | - | - | - | 1028 | 36 | - | - | 1091 | 30 |
| 5X | - | - | - | 1029 | 12 | - | - | 966 | 12 |
| 5Y | - | - | - | 1029 | 36 | - | - | 1092 | 30 |
| 6X | - | - | - | 1030 | 12 | - | - | 967 | 12 |
| 6Y | - | - | - | 1030 | 36 | - | - | 1093 | 30 |
| 7X | - | - | - | 1031 | 12 | - | - | 968 | 12 |
| 7Y | - | - | - | 1031 | 36 | - | - | 1094 | 30 |
| 8X | - | - | - | 1032 | 12 | - | - | 969 | 12 |
| 8Y | - | - | - | 1032 | 36 | - | - | 1095 | 30 |
| 9X | - | - | - | 1033 | 12 | - | - | 970 | 12 |
| 9Y | - | - | - | 1033 | 36 | - | - | 1096 | 30 |
| 10X | - | - | - | 1034 | 12 | - | - | 971 | 12 |
| 10Y | - | - | - | 1034 | 36 | - | - | 1097 | 30 |
| 11X | - | - | - | 1035 | 12 | - | - | 972 | 12 |
| 11Y | - | - | - | 1035 | 36 | - | - | 1098 | 30 |
| 12X | - | - | - | 1036 | 12 | - | - | 973 | 12 |
| 12Y | - | - | - | 1036 | 36 | - | - | 1099 | 30 |
| 13X | - | - | - | 1037 | 12 | - | - | 974 | 12 |
| 13Y | - | - | - | 1037 | 36 | - | - | 1100 | 30 |
| 14X | - | - | - | 1038 | 12 | - | - | 975 | 12 |
| 14Y | - | - | - | 1038 | 36 | - | - | 1101 | 30 |
| 15X | - | - | - | 1039 | 12 | - | - | 976 | 12 |
| 15Y | - | - | - | 1039 | 36 | - | - | 1102 | 30 |
| 16X | - | - | - | 1040 | 12 | - | - | 977 | 12 |
| 16Y | - | - | - | 1040 | 36 | - | - | 1103 | 30 |
| 17X | 108,00 | - | - | 1041 | 12 | - | - | 978 | 12 |
| 17Y | 108,05 | 5043,0 | 540 | 1041 | 36 | 36 | 42 | 1104 | 30 |
| 17Z | - | 5043,3 | 541 | 1041 | - | 21 | 27 | 1104 | 15 |
| 18X | 108,10 | 5031,0 | 500 | 1042 | 12 | 12 | 18 | 979 | 12 |
| 18W | - | 5031,3 | 501 | 1042 | - | 24 | 30 | 979 | 24 |
| 18Y | 108,15 | 5043,6 | 542 | 1042 | 36 | 36 | 42 | 1105 | 30 |
| 18Z | - | 5043,9 | 543 | 1042 | - | 21 | 27 | 1105 | 15 |
| 19X | 108,20 | - | - | 1043 | 12 | - | - | 980 | 12 |
| 19Y | 108,25 | 5044,2 | 544 | 1043 | 36 | 36 | 42 | 1106 | 30 |
| 19Z | - | 5044,5 | 545 | 1043 | - | 21 | 27 | 1106 | 15 |
| 20X | 108,30 | 5031,6 | 502 | 1044 | 12 | 12 | 18 | 981 | 12 |
| 20W | - | 5031,9 | 503 | 1044 | - | 24 | 30 | 981 | 24 |
| 20Y | 108,35 | 5044,8 | 546 | 1044 | 36 | 36 | 42 | 1107 | 30 |
| 20Z | - | 5045,1 | 547 | 1044 | - | 21 | 27 | 1107 | 15 |
| 21X | 108,40 | - | - | 1045 | 12 | - | - | 982 | 12 |
| 21Y | 108,45 | 5045,4 | 548 | 1045 | 36 | 36 | 42 | 1108 | 30 |
| 21Z | - | 5045,7 | 549 | 1045 | - | 21 | 27 | 1108 | 15 |
| 22X | 108,50 | 5032,2 | 504 | 1046 | 12 | 12 | 18 | 983 | 12 |
| 22W | - | 5032,5 | 505 | 1046 | - | 24 | 30 | 983 | 24 |
| 22Y | 108,55 | 5046,0 | 550 | 1046 | 36 | 36 | 42 | 1109 | 30 |
| 22Z | - | 5046,3 | 551 | 1046 | - | 21 | 27 | 1109 | 15 |
| 23X | 108,60 | - | - | 1047 | 12 | - | - | 984 | 12 |
| 23Y | 108,65 | 5046,6 | 552 | 1047 | 36 | 36 | 42 | 1110 | 30 |
| 23Z | - | 5046,9 | 553 | 1047 | - | 21 | 27 | 1110 | 15 |
| 24X | 108,70 | 5032,8 | 506 | 1048 | 12 | 12 | 18 | 985 | 12 |
| 24W | - | 5033,1 | 507 | 1048 | - | 24 | 30 | 985 | 24 |
| 24Y | 108,75 | 5047,2 | 554 | 1048 | 36 | 36 | 42 | 1111 | 30 |
| 24Z | - | 5047,5 | 555 | 1048 | - | 21 | 27 | 1111 | 15 |
| 25X | 108,80 | - | - | 1049 | 12 | - | - | 986 | 12 |
| 25Y | 108,85 | 5047,8 | 556 | 1049 | 36 | 36 | 42 | 1112 | 30 |
| 25Z | - | 5048,1 | 557 | 1049 | - | 21 | 27 | 1112 | 15 |
| 26X | 108,90 | 5033,4 | 508 | 1050 | 12 | 12 | 18 | 987 | 12 |
| 26W | - | 5033,7 | 509 | 1050 | - | 24 | 30 | 987 | 24 |
| 26Y | 108,95 | 5048,4 | 558 | 1050 | 36 | 36 | 42 | 1113 | 30 |
| 26Z | - | 5048,7 | 559 | 1050 | - | 21 | 27 | 1113 | 15 |
| 27X | 109,00 | - | - | 1051 | 12 | - | - | 988 | 12 |
| 27Y | 109,05 | 5049,0 | 560 | 1051 | 36 | 36 | 42 | 1114 | 30 |
| 27Z | - | 5049,3 | 561 | 1051 | - | 21 | 27 | 1114 | 15 |
| 28X | 109,10 | 5034,0 | 510 | 1052 | 12 | 12 | 18 | 989 | 12 |
| 28W | - | 5034,3 | 511 | 1052 | - | 24 | 30 | 989 | 24 |
| 28Y | 109,15 | 5049,6 | 562 | 1052 | 36 | 36 | 42 | 1115 | 30 |
| 28Z | - | 5049,9 | 563 | 1052 | - | 21 | 27 | 1115 | 15 |
| 29X | 109,20 | - | - | 1053 | 12 | - | - | 990 | 12 |
| 29Y | 109,25 | 5050,2 | 564 | 1053 | 36 | 36 | 42 | 1116 | 30 |
| 29Z | - | 5050,5 | 565 | 1053 | - | 21 | 27 | 1116 | 15 |
| 30X | 109,30 | 5034,6 | 512 | 1054 | 12 | 12 | 18 | 991 | 12 |
| 30W | - | 5034,9 | 513 | 1054 | - | 24 | 30 | 991 | 24 |
| 30Y | - | 5050,8 | 566 | 1054 | 36 | 36 | 42 | 1117 | 30 |
| 30Z | 109,40 | 5051,1 | 567 | 1054 | - | 21 | 27 | 1117 | 15 |
| 31X | 109,45 | - | - | 1055 | 12 | - | - | 992 | 12 |
| 31Y | - | 5051,4 | 568 | 1055 | 36 | 36 | 42 | 1118 | 30 |
| 31Z | 109,50 | 5051,7 | 569 | 1055 | - | 21 | 27 | 1118 | 15 |
| 32X | - | 5035,2 | 514 | 1056 | 12 | 12 | 18 | 993 | 12 |
| 32W | 109,55 | 5035,5 | 515 | 1056 | - | 24 | 30 | 993 | 24 |
| 32Y | - | 5052,0 | 570 | 1056 | 36 | 36 | 42 | 1119 | 30 |
| 32Z | 109,60 | 5052,3 | 571 | 1056 | - | 21 | 27 | 1119 | 15 |
| 33X | 109,65 | - | - | 1057 | 12 | - | - | 994 | 12 |
| 33Y | 5052,6 | 572 | 1057 | 36 | 36 | 42 | 1120 | 30 | |
| 33Z | - | 5052,9 | 573 | 1057 | - | 21 | 27 | 1120 | 15 |
| 34X | 109,70 | 5035,8 | 516 | 1058 | 12 | 12 | 18 | 995 | 12 |
| 34W | - | 5036,1 | 517 | 1058 | - | 24 | 30 | 995 | 24 |
| 34Y | 109,75 | 5053,2 | 574 | 1058 | 36 | 36 | 42 | 1121 | 30 |
| 34Z | - | 5053,5 | 575 | 1058 | - | 21 | 27 | 1121 | 15 |
| 35X | 109,80 | - | - | 1059 | 12 | - | - | 996 | 12 |
| 35Y | 109,85 | 5053,8 | 576 | 1059 | 36 | 36 | 42 | 1122 | 30 |
| 35Z | - | 5054,1 | 577 | 1059 | - | 21 | 27 | 1122 | 15 |
| 36X | 109,90 | 5036,4 | 518 | 1060 | 12 | 12 | 18 | 997 | 12 |
| 36W | - | 5036,7 | 519 | 1060 | - | 24 | 30 | 997 | 24 |
| 36Y | 109,95 | 5054,4 | 578 | 1060 | 36 | 36 | 42 | 1123 | 30 |
| 36Z | - | 5054,7 | 579 | 1060 | - | 21 | 27 | 1123 | 15 |
| 37X | 110,00 | - | - | 1061 | 12 | - | - | 998 | 12 |
| 37Y | 110,05 | 5055,0 | 580 | 1061 | 36 | 36 | 42 | 1124 | 30 |
| 37Z | - | 5055,3 | 581 | 1061 | - | 21 | 27 | 1124 | 15 |
| 38X | 110,10 | 5037,0 | 520 | 1062 | 12 | 12 | 18 | 999 | 12 |
| 38W | - | 5037,3 | 521 | 1062 | - | 24 | 30 | 999 | 24 |
| 38Y | 110,15 | 5055,6 | 582 | 1062 | 36 | 36 | 42 | 1125 | 30 |
| 38Z | - | 5055,9 | 583 | 1062 | - | 21 | 27 | 1125 | 15 |
| 39X | 110,20 | - | - | 1063 | 12 | - | - | 1000 | 12 |
| 39Y | 110,25 | 5056,2 | 584 | 1063 | 36 | 36 | 42 | 1126 | 30 |
| 39Z | - | 5056,5 | 585 | 1063 | - | 21 | 27 | 1126 | 15 |
| 40X | 110,30 | 5037,6 | 522 | 1064 | 12 | 12 | 18 | 1001 | 12 |
| 40W | - | 5037,9 | 523 | 1064 | - | 24 | 30 | 1001 | 24 |
| 40Y | 110,35 | 5056,8 | 586 | 1064 | 36 | 36 | 42 | 1127 | 30 |
| 40Z | - | 5057,1 | 587 | 1064 | - | 21 | 27 | 1127 | 15 |
| 41X | 110,40 | - | - | 1065 | 12 | - | - | 1002 | 12 |
| 41Y | 110,45 | 5057,4 | 588 | 1065 | 36 | 36 | 42 | 1128 | 30 |
| 41Z | - | 5057,7 | 589 | 1065 | - | 21 | 27 | 1128 | 15 |
| 42X | 110,50 | 5038,2 | 524 | 1066 | 12 | 12 | 18 | 1003 | 12 |
| 42W | - | 5038,5 | 525 | 1066 | - | 24 | 30 | 1003 | 24 |
| 42Y | 110,55 | 5058,0 | 590 | 1066 | 36 | 36 | 42 | 1129 | 30 |
| 42Z | - | 5058,3 | 591 | 1066 | - | 21 | 27 | 1129 | 15 |
| 43X | 110,60 | - | - | 1067 | 12 | - | - | 1004 | 12 |
| 43Y | 110,65 | 5058,6 | 592 | 1067 | 36 | 36 | 42 | 1130 | 30 |
| 43Z | - | 5058,9 | 593 | 1067 | - | 21 | 27 | 1130 | 15 |
| 44X | 110,70 | 5038,8 | 526 | 1068 | 12 | 12 | 18 | 1005 | 12 |
| 44W | - | 5039,1 | 527 | 1068 | - | 24 | 30 | 1005 | 24 |
| 44Y | 110,75 | 5059,2 | 594 | 1068 | 36 | 36 | 42 | 1131 | 30 |
| 44Z | - | 5059,5 | 595 | 1068 | - | 21 | 27 | 1131 | 15 |
| 45X | 110,80 | - | - | 1069 | 12 | - | - | 1006 | 12 |
| 45Y | 110,85 | 5059,8 | 596 | 1069 | 36 | 36 | 42 | 1132 | 30 |
| 45Z | - | 5060,1 | 597 | 1069 | - | 21 | 27 | 1132 | 15 |
| 46X | 110,90 | 5039,4 | 528 | 1070 | 12 | 12 | 18 | 1007 | 12 |
| 46W | - | 5039,7 | 529 | 1070 | - | 24 | 30 | 1007 | 24 |
| 46Y | 110,95 | 5060,4 | 598 | 1070 | 36 | 36 | 42 | 1133 | 30 |
| 46Z | - | 5060,7 | 599 | 1070 | - | 21 | 27 | 1133 | 15 |
| 47X | 111,00 | - | - | 1071 | 12 | - | - | 1008 | 12 |
| 47Y | 111,05 | 5061,0 | 600 | 1071 | 36 | 36 | 42 | 1134 | 30 |
| 47Z | - | 5061,3 | 601 | 1071 | - | 21 | 27 | 1134 | 15 |
| 48X | 111,10 | 5040,0 | 530 | 1072 | 12 | 12 | 18 | 1009 | 12 |
| 48W | - | 5040,3 | 531 | 1072 | - | 24 | 30 | 1009 | 24 |
| 48Y | 111,15 | 5061,6 | 602 | 1072 | 36 | 36 | 42 | 1135 | 30 |
| 48Z | - | 5061,9 | 603 | 1072 | - | 21 | 27 | 1135 | 15 |
| 49X | 111,20 | - | - | 1073 | 12 | - | - | 1010 | 12 |
| 49Y | 111,25 | 5062,2 | 604 | 1073 | 36 | 36 | 42 | 1136 | 30 |
| 49Z | - | 5062,5 | 605 | 1073 | - | 21 | 27 | 1136 | 15 |
| 50X | 111,30 | 5040,6 | 532 | 1074 | 12 | 12 | 18 | 1011 | 12 |
| 50W | - | 5040,9 | 533 | 1074 | - | 24 | 30 | 1011 | 24 |
| 50Y | 111,35 | 5062,8 | 606 | 1074 | 36 | 36 | 42 | 1137 | 30 |
| 50Z | - | 5063,1 | 607 | 1074 | - | 21 | 27 | 1137 | 15 |
| 51X | 111,40 | - | - | 1075 | 12 | - | - | 1012 | 12 |
| 51Y | 111,45 | 5063,4 | 608 | 1075 | 36 | 36 | 42 | 1138 | 30 |
| 51Z | - | 5063,7 | 609 | 1075 | - | 21 | 27 | 1138 | 15 |
| 52X | 111,50 | 5041,2 | 534 | 1076 | 12 | 12 | 18 | 1013 | 12 |
| 52W | - | 5041,5 | 535 | 1076 | - | 24 | 30 | 1013 | 24 |
| 52Y | 111,55 | 5064,0 | 610 | 1076 | 36 | 36 | 42 | 1139 | 30 |
| 52Z | - | 5064,3 | 611 | 1076 | - | 21 | 27 | 1139 | 15 |
| 53X | 111,60 | - | - | 1077 | 12 | - | - | 1014 | 12 |
| 53Y | 111,65 | 5064,6 | 612 | 1077 | 36 | 36 | 42 | 1140 | 30 |
| 53Z | - | 5064,9 | 613 | 1077 | - | 21 | 27 | 1140 | 15 |
| 54X | 111,70 | 5041,8 | 536 | 1078 | 12 | 12 | 18 | 1015 | 12 |
| 54W | - | 5042,1 | 537 | 1078 | - | 24 | 30 | 1015 | 24 |
| 54Y | 111,75 | 5065,2 | 614 | 1078 | 36 | 36 | 42 | 1141 | 30 |
| 54Z | - | 5065,5 | 615 | 1078 | - | 21 | 27 | 1141 | 15 |
| 55X | 111,80 | - | - | 1079 | 12 | - | - | 1016 | 12 |
| 55Y | 111,85 | 5065,8 | 616 | 1079 | 36 | 36 | 42 | 1142 | 30 |
| 55Z | - | 5066,1 | 617 | 1079 | - | 21 | 27 | 1142 | 15 |
| 56X | 111,90 | 5042,4 | 538 | 1080 | 12 | 12 | 18 | 1017 | 12 |
| 56W | - | 5042,7 | 539 | 1080 | - | 24 | 30 | 1017 | 24 |
| 56Y | 111,95 | 5066,4 | 618 | 1080 | 36 | 36 | 42 | 1143 | 30 |
| 56Z | - | 5066,7 | 619 | 1080 | - | 21 | 27 | 1143 | 15 |
| 57X | 112,00 | - | - | 1081 | 12 | - | - | 1018 | 12 |
| 57Y | 112,05 | - | - | 1081 | 36 | - | - | 1144 | 30 |
| 58X | 112,10 | - | - | 1082 | 12 | - | - | 1019 | 12 |
| 58Y | 112,15 | - | - | 1082 | 36 | - | - | 1145 | 30 |
| 59X | 112,20 | - | - | 1083 | 12 | - | - | 1020 | 12 |
| 59Y | 112,25 | - | - | 1083 | 36 | - | - | 1146 | 30 |
| 60X | - | - | - | 1084 | 12 | - | - | 1021 | 12 |
| 60Y | - | - | - | 1084 | 36 | - | - | 1147 | 30 |
| 61X | - | - | - | 1085 | 12 | - | - | 1022 | 12 |
| 61Y | - | - | - | 1085 | 36 | - | - | 1148 | 30 |
| 62X | - | - | - | 1086 | 12 | - | - | 1023 | 12 |
| 62Y | - | - | - | 1086 | 36 | - | - | 1149 | 30 |
| 63X | - | - | - | 1087 | 12 | - | - | 1024 | 12 |
| 63Y | - | - | - | 1087 | 36 | - | - | 1150 | 30 |
| 64X | - | - | - | 1088 | 12 | - | - | 1151 | 12 |
| 64Y | - | - | - | 1088 | 36 | - | - | 1025 | 30 |
| 65X | - | - | - | 1089 | 12 | - | - | 1152 | 12 |
| 65Y | - | - | - | 1089 | 36 | - | - | 1026 | 30 |
| 66X | - | - | - | 1090 | 12 | - | - | 1153 | 12 |
| 66Y | - | - | - | 1090 | 36 | - | - | 1027 | 30 |
| 67X | - | - | - | 1091 | 12 | - | - | 1154 | 12 |
| 67Y | - | - | - | 1091 | 36 | - | - | 1028 | 30 |
| 68X | - | - | - | 1092 | 12 | - | - | 1155 | 12 |
| 68Y | - | - | - | 1092 | 36 | - | - | 1029 | 30 |
| 69X | - | - | - | 1093 | 12 | - | - | 1156 | 12 |
| 69Y | - | - | - | 1093 | 36 | - | - | 1030 | 30 |
| 70X | 112,30 | - | - | 1094 | 12 | - | - | 1157 | 12 |
| 70Y | 112,35 | - | - | 1094 | 36 | - | - | 1031 | 30 |
| 71X | 112,40 | - | - | 1095 | 12 | - | - | 1158 | 12 |
| 71Y | 112,45 | - | - | 1095 | 36 | - | - | 1032 | 30 |
| 72X | 112,50 | - | - | 1096 | 12 | - | - | 1159 | 12 |
| 72Y | 112,55 | - | - | 1096 | 36 | - | - | 1033 | 30 |
| 73X | 112,60 | - | - | 1097 | 12 | - | - | 1160 | 12 |
| 73Y | 112,65 | - | - | 1097 | 36 | - | - | 1034 | 30 |
| 74X | 112,70 | - | - | 1098 | 12 | - | - | 1161 | 12 |
| 74Y | 112,75 | - | - | 1098 | 36 | - | - | 1035 | 30 |
| 75X | 112,80 | - | - | 1099 | 12 | - | - | 1162 | 12 |
| 75Y | 112,85 | - | - | 1099 | 36 | - | - | 1036 | 30 |
| 76X | 112,90 | - | - | 1100 | 12 | - | - | 1163 | 12 |
| 76Y | 112,95 | - | - | 1100 | 36 | - | - | 1037 | 30 |
| 77X | 113,00 | - | - | 1101 | 12 | - | - | 1164 | 12 |
| 77Y | 113,05 | - | - | 1101 | 36 | - | - | 1038 | 30 |
| 78X | 113,10 | - | - | 1102 | 12 | - | - | 1165 | 12 |
| 78Y | 113,15 | - | - | 1102 | 36 | - | - | 1039 | 30 |
| 79X | 113,20 | - | - | 1103 | 12 | - | - | 1166 | 12 |
| 79Y | 113,25 | - | - | 1103 | 36 | - | - | 1040 | 30 |
| 80X | 113,30 | - | - | 1104 | 12 | - | - | 1167 | 12 |
| 80Y | 113,35 | 5067,0 | 620 | 1104 | 36 | 36 | 42 | 1041 | 30 |
| 80Z | - | 5067,3 | 621 | 1104 | - | 21 | 27 | 1041 | 15 |
| 81X | 113,40 | - | - | 1105 | 12 | - | - | 1168 | 12 |
| 81Y | 113,45 | 5067,6 | 622 | 1105 | 36 | 36 | 42 | 1042 | 30 |
| 81Z | - | 5067,9 | 623 | 1105 | - | 21 | 27 | 1042 | 15 |
| 82X | 113,50 | - | - | 1106 | 12 | - | - | 1169 | 12 |
| 82Y | 113,55 | 5068,2 | 624 | 1106 | 36 | 36 | 42 | 1043 | 30 |
| 82Z | - | 5068,5 | 625 | 1106 | - | 21 | 27 | 1043 | 15 |
| 83X | 113,60 | - | - | 1107 | 12 | - | - | 1170 | 12 |
| 83Y | 113,65 | 5068,8 | 626 | 1107 | 36 | 36 | 42 | 1044 | 30 |
| 83Z | - | 5069,1 | 627 | 1107 | - | 21 | 27 | 1044 | 15 |
| 84X | 113,70 | - | - | 1108 | 12 | - | - | 1171 | 12 |
| 84Y | 113,75 | 5069,4 | 628 | 1108 | 36 | 36 | 42 | 1045 | 30 |
| 84Z | - | 5069,7 | 629 | 1108 | - | 21 | 27 | 1045 | 15 |
| 85X | 113,80 | - | - | 1109 | 12 | - | - | 1172 | 12 |
| 85Y | 113,85 | 5070,0 | 630 | 1109 | 36 | 36 | 42 | 1046 | 30 |
| 85Z | - | 5070,3 | 631 | 1109 | - | 21 | 27 | 1046 | 15 |
| 86X | 113,90 | - | - | 1110 | 12 | - | - | 1173 | 12 |
| 86Y | 113,95 | 5070,6 | 632 | 1110 | 36 | 36 | 42 | 1047 | 30 |
| 86Z | - | 5070,9 | 633 | 1110 | - | 21 | 27 | 1047 | 15 |
| 87X | 114,00 | - | - | 1111 | 12 | - | - | 1174 | 12 |
| 87Y | 114,05 | 5071,2 | 634 | 1111 | 36 | 36 | 42 | 1048 | 30 |
| 87Z | - | 5071,5 | 635 | 1111 | - | 21 | 27 | 1048 | 15 |
| 88X | 114,10 | - | - | 1112 | 12 | - | - | 1175 | 12 |
| 88Y | 114,15 | 5071,8 | 636 | 1112 | 36 | 36 | 42 | 1049 | 30 |
| 88Z | - | 5072,1 | 637 | 1112 | - | 21 | 27 | 1049 | 15 |
| 89X | 114,20 | - | - | 1113 | 12 | - | - | 1176 | 12 |
| 89Y | 114,25 | 5072,4 | 638 | 1113 | 36 | 36 | 42 | 1050 | 30 |
| 89Z | - | 5072,7 | 639 | 1113 | - | 21 | 27 | 1050 | 15 |
| 90X | 114,30 | - | - | 1114 | 12 | - | - | 1177 | 12 |
| 90Y | 114,35 | 5073,0 | 640 | 1114 | 36 | 36 | 42 | 1051 | 30 |
| 90Z | - | 5073,3 | 641 | 1114 | - | 21 | 27 | 1051 | 15 |
| 91X | 114,40 | - | - | 1115 | 12 | - | - | 1178 | 12 |
| 91Y | 114,45 | 5073,6 | 642 | 1115 | 36 | 36 | 42 | 1052 | 30 |
| 91Z | - | 5073,9 | 643 | 1115 | - | 21 | 27 | 1052 | 15 |
| 92X | 114,50 | - | - | 1116 | 12 | - | - | 1179 | 12 |
| 92Y | 114,55 | 5074,2 | 644 | 1116 | 36 | 36 | 42 | 1053 | 30 |
| 92Z | - | 5074,5 | 645 | 1116 | - | 21 | 27 | 1053 | 15 |
| 93X | 114,60 | - | - | 1117 | 12 | - | - | 1180 | 12 |
| 93Y | 114,65 | 5074,8 | 646 | 1117 | 36 | 36 | 42 | 1054 | 30 |
| 93Z | - | 5075,1 | 647 | 1117 | - | 21 | 27 | 1054 | 15 |
| 94X | 114,70 | - | - | 1118 | 12 | - | - | 1181 | 12 |
| 94Y | 114,75 | 5075,4 | 648 | 1118 | 36 | 36 | 42 | 1055 | 30 |
| 94Z | - | 5075,7 | 649 | 1118 | - | 21 | 27 | 1055 | 15 |
| 95X | 114,80 | - | - | 1119 | 12 | - | - | 1182 | 12 |
| 95Y | 114,85 | 5076,0 | 650 | 1119 | 36 | 36 | 42 | 1056 | 30 |
| 95Z | - | 5076,3 | 651 | 1119 | - | 21 | 27 | 1056 | 15 |
| 96X | 114,90 | - | - | 1120 | 12 | - | - | 1183 | 12 |
| 96Y | 114,95 | 5076,6 | 652 | 1120 | 36 | 36 | 42 | 1057 | 30 |
| 96Z | - | 5076,9 | 653 | 1120 | - | 21 | 27 | 1057 | 15 |
| 97X | 115,00 | - | - | 1121 | 12 | - | - | 1184 | 12 |
| 97Y | 115,05 | 5077,2 | 654 | 1121 | 36 | 36 | 42 | 1058 | 30 |
| 97Z | - | 5077,5 | 655 | 1121 | - | 21 | 27 | 1058 | 15 |
| 98X | 115,10 | - | - | 1122 | 12 | - | - | 1185 | 12 |
| 98Y | 115,15 | 5077,8 | 656 | 1122 | 36 | 36 | 42 | 1059 | 30 |
| 98Z | - | 5078,1 | 657 | 1122 | - | 21 | 27 | 1059 | 15 |
| 99X | 115,20 | - | - | 1123 | 12 | - | - | 1186 | 12 |
| 99Y | 115,25 | 5078,4 | 658 | 1123 | 36 | 36 | 42 | 1060 | 30 |
| 99Z | - | 5078,7 | 659 | 1123 | - | 21 | 27 | 1060 | 15 |
| 100X | 115,30 | - | - | 1124 | 12 | - | - | 1187 | 12 |
| 100Y | 115,35 | 5079,0 | 660 | 1124 | 36 | 36 | 42 | 1061 | 30 |
| 100Z | - | 5079,3 | 661 | 1124 | - | 21 | 27 | 1061 | 15 |
| 101X | 115,40 | - | - | 1125 | 12 | - | - | 1188 | 12 |
| 101Y | 115,45 | 5079,6 | 662 | 1125 | 36 | 36 | 42 | 1062 | 30 |
| 101Z | - | 5079,9 | 663 | 1125 | - | 21 | 27 | 1062 | 15 |
| 102X | 115,50 | - | - | 1126 | 12 | - | - | 1189 | 12 |
| 102Y | 115,55 | 5080,2 | 664 | 1126 | 36 | 36 | 42 | 1063 | 30 |
| 102Z | - | 5080,5 | 665 | 1126 | - | 21 | 27 | 1063 | 15 |
| 103X | 115,60 | - | - | 1127 | 12 | - | - | 1190 | 12 |
| 103Y | 115,65 | 5080,8 | 666 | 1127 | 36 | 36 | 42 | 1064 | 30 |
| 103Z | - | 5081,1 | 667 | 1127 | - | 21 | 27 | 1064 | 15 |
| 104X | 115,70 | - | - | 1128 | 12 | - | - | 1191 | 12 |
| 104Y | 115,75 | 5081,4 | 668 | 1128 | 36 | 36 | 42 | 1065 | 30 |
| 104Z | - | 5081,7 | 669 | 1128 | - | 21 | 27 | 1065 | 15 |
| 105X | 115,80 | - | - | 1129 | 12 | - | - | 1192 | 12 |
| 105Y | 115,85 | 5082,0 | 670 | 1129 | 36 | 36 | 42 | 1066 | 30 |
| 105Z | - | 5082,3 | 671 | 1129 | - | 21 | 27 | 1066 | 15 |
| 106X | 115,90 | - | - | 1130 | 12 | - | - | 1193 | 12 |
| 106Y | 115,95 | 5082,6 | 672 | 1130 | 36 | 36 | 42 | 1067 | 30 |
| 106Z | - | 5082,9 | 673 | 1130 | - | 21 | 27 | 1067 | 15 |
| 107X | 116,00 | - | - | 1131 | 12 | - | - | 1194 | 12 |
| 107Y | 116,05 | 5083,2 | 674 | 1131 | 36 | 36 | 42 | 1068 | 30 |
| 107Z | - | 5083,5 | 675 | 1131 | - | 21 | 27 | 1068 | 15 |
| 108X | 116,10 | - | - | 1132 | 12 | - | - | 1195 | 12 |
| 108Y | 116,15 | 5083,8 | 676 | 1132 | 36 | 36 | 42 | 1069 | 30 |
| 108Z | - | 5084,1 | 677 | 1132 | - | 21 | 27 | 1069 | 15 |
| 109X | 116,20 | - | - | 1133 | 12 | - | - | 1196 | 12 |
| 109Y | 116,25 | 5084,4 | 678 | 1133 | 36 | 36 | 42 | 1070 | 30 |
| 109Z | - | 5084,7 | 679 | 1133 | - | 21 | 27 | 1070 | 15 |
| 110X | 116,30 | - | - | 1134 | 12 | - | - | 1197 | 12 |
| 110Y | 116,35 | 5085,0 | 680 | 1134 | 36 | 36 | 42 | 1071 | 30 |
| 110Z | - | 5085,3 | 681 | 1134 | - | 21 | 27 | 1071 | 15 |
| 111X | 116,40 | - | - | 1135 | 12 | - | - | 1198 | 12 |
| 111Y | 116,45 | 5085,6 | 682 | 1135 | 36 | 36 | 42 | 1072 | 30 |
| 111Z | - | 5085,9 | 683 | 1135 | - | 21 | 27 | 1072 | 15 |
| 112X | 116,50 | - | - | 1136 | 12 | - | - | 1199 | 12 |
| 112Y | 116,55 | 5086,2 | 684 | 1136 | 36 | 36 | 42 | 1073 | 30 |
| 112Z | - | 5086,5 | 685 | 1136 | - | 21 | 27 | 1073 | 15 |
| 113X | 116,60 | - | - | 1137 | 12 | - | - | 1200 | 12 |
| 113Y | 116,65 | 5086,8 | 686 | 1137 | 36 | 36 | 42 | 1074 | 30 |
| 113Z | - | 5087,1 | 687 | 1137 | - | 21 | 27 | 1074 | 15 |
| 114X | 116,70 | - | - | 1138 | 12 | - | - | 1201 | 12 |
| 114Y | 116,75 | 5087,4 | 688 | 1138 | 36 | 36 | 42 | 1075 | 30 |
| 114Z | - | 5087,7 | 689 | 1138 | - | 21 | 27 | 1075 | 15 |
| 115X | 116,80 | - | - | 1139 | 12 | - | - | 1202 | 12 |
| 115Y | 116,85 | 5088,0 | 690 | 1139 | 36 | 36 | 42 | 1076 | 30 |
| 115Z | - | 5088,3 | 691 | 1139 | - | 21 | 27 | 1076 | 15 |
| 116X | 116,90 | - | - | 1140 | 12 | - | - | 1203 | 12 |
| 116Y | 116,95 | 5088,6 | 692 | 1140 | 36 | 36 | 42 | 1077 | 30 |
| 116Z | - | 5088,9 | 693 | 1140 | - | 21 | 27 | 1077 | 15 |
| 117X | 117,00 | - | - | 1141 | 12 | - | - | 1204 | 12 |
| 117Y | 117,05 | 5089,2 | 694 | 1141 | 36 | 36 | 42 | 1078 | 30 |
| 117Z | - | 5089,5 | 695 | 1141 | - | 21 | 27 | 1078 | 15 |
| 118X | 117,10 | - | - | 1142 | 12 | - | - | 1205 | 12 |
| 118Y | 117,15 | 5089,8 | 696 | 1142 | 36 | 36 | 42 | 1079 | 30 |
| 118Z | - | 5090,1 | 697 | 1142 | - | 21 | 27 | 1079 | 15 |
| 119X | 117,20 | - | - | 1143 | 12 | - | - | 1206 | 12 |
| 119Y | 117,25 | 5090,4 | 698 | 1143 | 36 | 36 | 42 | 1080 | 30 |
| 119Z | - | 5090,7 | 699 | 1143 | - | 21 | 27 | 1080 | 15 |
| 120X | 117,30 | - | - | 1144 | 12 | - | - | 1207 | 12 |
| 120Y | 117,35 | - | - | 1144 | 36 | - | - | 1081 | 30 |
| 121X | 117,40 | - | - | 1145 | 12 | - | - | 1208 | 12 |
| 121Y | 117,45 | - | - | 1145 | 36 | - | - | 1082 | 30 |
| 122X | 117,50 | - | - | 1146 | 12 | - | - | 1209 | 12 |
| 122Y | 117,55 | - | - | 1146 | 36 | - | - | 1083 | 30 |
| 123X | 117,60 | - | - | 1147 | 12 | - | - | 1210 | 12 |
| 123Y | 117,65 | - | - | 1147 | 36 | - | - | 1084 | 30 |
| 124X | 117,70 | - | - | 1148 | 12 | - | - | 1211 | 12 |
| 124Y | 117,75 | - | - | 1148 | 36 | - | - | 1085 | 30 |
| 125X | 117,80 | - | - | 1149 | 12 | - | - | 1212 | 12 |
| 125Y | 117,85 | - | - | 1149 | 36 | - | - | 1086 | 30 |
| 126X | 117,90 | - | - | 1150 | 12 | - | - | 1213 | 12 |
| 126Y | 117,95 | - | - | 1150 | 36 | - | - | 1087 | 30 |
| <*> Эти каналы зарезервированы исключительно для выделения на национальной основе. <**> Эти каналы могут использоваться для национального выделения на вторичной основе. Первичной основой резервирования этих каналов является обеспечение защиты системы вторичной обзорной радиолокации. <***> Частота 108 МГц не предусматривается для выделения ее РМС. Взаимодействующий канал 17X РМД может быть назначен для аварийного использования. | |||||||||
ПРИЛОЖЕНИЕ № 12
к Правилам (п. 18)
Требования к приводной радиостанции (ПРС)
1. Состав приводной радиостанции включает:
передающее устройство;
антенную систему;
систему контроля и дистанционного управления;
комплект ЗИП;
комплект эксплуатационной документации.
2. Тактико-технические требования
2.1. Зона действия
Зона действия приводного радиомаяка должна быть не менее 50 км для обеспечения полетов в районе аэродрома и не менее 150 км для обеспечения полетов по трассам.
Погрешность приводной радиостанции, вносимая в суммарную погрешность определения на борту ВС значений курсовых углов, не должна превышать +/- 3°.
2.2. Минимальное значение напряженности поля в зоне действия приводного радиомаяка должно составлять 70 мкВ/м.
2.3. Радиочастота
Радиостанция должна обеспечивать работу на любой из частот в диапазоне 190 - 1750 кГц. Допускается использование диапазона частот от 150 до 1750 кГц.
Допуск на отклонение частоты несущей радиостанции должен быть +/- 0,01%. Для радиостанций, излучаемая мощность которых превышает 200 Вт и работающих на частотах выше 1606,5 кГц, допуск по частоте должен быть +/- 0,005%.
2.4. Характеристики излучений
Радиостанция должна передавать излучения классов A2A (передача сигнала опознавания) и A3E (обеспечение воздушной радиосвязи). При этом должна быть обеспечена передача сигнала опознавания или радиотелефонных сигналов без разрыва несущей. Допускается радиоизлучение класса A1A.
Используемые для опознавания частоты модулирующего тонального сигнала должны составлять (1020 +/- 50) Гц и (400 +/- 25) Гц.
Диапазон частот передаваемого речевого сигнала или сигнала вызова должен находиться в интервале от 300 до 3000 Гц.
Глубина модуляции несущей сигналом опознавания и речевым сигналом должна быть не ниже 85% и 50% соответственно.
Суммарная глубина модуляции несущей нежелательными низкочастотными сигналами должна составлять не более 5%.
2.5. Опознавание
Опознавательный сигнал должен передаваться международным кодом Морзе в виде одной - трех букв со скоростью примерно семь слов в минуту. Опознавательный сигнал должен передаваться автоматически каждые 10 - 30 с равными интервалами в пределах этого периода времени.
2.6. Радиотелефонная связь
Радиостанция должна обеспечивать передачу радиотелефонных сигналов на борт ВС на той же частоте несущей, которая используется для обеспечения навигационной функции.
Радиотелефонная связь не должна мешать обеспечению навигационной функции радиостанции. При излучении сигналов радиотелефонной связи сигналы опознавания не должны передаваться.
2.7. Управление и контроль
Управление работой радиостанции, а также индикация ее состояния должны осуществляться в дистанционном и местном режимах.
Система автоматического контроля радиостанции должна за время не более 2 с отключать работающий комплект аппаратуры, включать резервный комплект (при его наличии), прекращать радиоизлучение станции при отказе комплекта(ов), а также обеспечивать аварийную сигнализацию в пунктах управления:
при уменьшении мощности излучения несущей частоты более чем на 50% от установленной;
уменьшении глубины модуляции более чем на 50%;
прекращении передачи опознавательного сигнала;
неисправности или отказе самого контрольного устройства.
2.8. Средний срок службы должен составлять не менее 15 лет.
2.9. Средняя наработка на отказ должна составлять не менее 10 000 час.
2.10. Среднее время восстановления должно быть не более 30 мин.
2.11. Время переключения на резерв должно быть не более 2 с.
ПРИЛОЖЕНИЕ № 13
к Правилам (п. 19)
Требования к маркерному радиомаяку (МРМ)
1. Состав маркерного радиомаяка включает:
передающее устройство;
антенную систему;
аппаратуру контроля и управления;
источник бесперебойного питания;
комплект эксплуатационной документации;
комплект ЗИП.
2. Тактико-технические требования
2.1. МРМ должен работать на частоте 75 МГц с допуском на отклонение частоты несущей +/- 0,005%.
2.2. Излучение МРМ должно быть поляризовано в горизонтальной плоскости.
2.3. Зона действия
Зона действия маяков на линии курса и глиссады РМС должна составлять:
(150 +/- 50) м внутреннего МРМ;
(300 +/- 100) м ближнего (среднего) МРМ;
(600 +/- 200) м дальнего (внешнего) МРМ.
Напряженность поля на границе зоны действия МРМ должна быть не менее 1,5 мВ/м.
Возрастание напряженности поля в пределах зоны действия должно быть не менее чем до 3 мВ/м.
2.4. Модуляция несущей
Номинальные частоты сигналов, модулирующих несущую, должны быть 3000 Гц, 1300 Гц и 400 Гц для внутреннего, ближнего и дальнего МРМ соответственно.
Допуск на отклонение частоты модулирующего сигнала от ее номинального значения должен составлять +/- 2,5%.
Общее содержание гармоник каждого модулирующего сигнала МРМ не должно превышать 15%.
Глубина амплитудной модуляции несущей МРМ должна быть (95 +/- 4)%.
2.5. Опознавание
Сигналами опознавания должны быть:
внутреннего МРМ - непрерывная передача шести точек в секунду;
ближнего (среднего) МРМ - непрерывная передача чередующихся точек и тире, причем тире передаются со скоростью два тире в секунду, а точки - со скоростью шесть точек в секунду. При отсутствии внутреннего МРМ допускается непрерывная передача шести точек в секунду.
дальнего (внешнего) МРМ - непрерывная передача двух тире в секунду.
Скорости передачи должны выдерживаться с допуском +/- 15%.
2.6. Контроль
Система автоматического контроля МРМ должна передавать предупреждение в пункты управления при возникновении любого из следующих условий:
уменьшение выходной мощности ниже 50% от установленной;
прекращение модуляции или манипуляции.
В системе автоматического контроля рекомендуется реализовать передачу в пункты управления предупреждения при условии уменьшения глубины модуляции до значения менее 50% от номинального.
2.7. Средний срок службы должен составлять не менее 15 лет.
2.8. Средняя наработка на отказ должна составлять не менее 10 000 час.
2.9. Среднее время восстановления должно быть не более 30 мин.
2.10. Время переключения на резерв должно быть не более 2 с.
ПРИЛОЖЕНИЕ № 14
к Правилам (п. 20)
Требования к радиомаячной системы инструментального захода на посадку (метрового диапазона) (РМС)
1. Состав наземного оборудования РМС включает:
курсовой радиомаяк (КРМ) с антенной системой, системами контроля, дистанционного управления и индикации рабочего состояния в пунктах управления;
глиссадный радиомаяк (ГРМ) с антенной системой, системами контроля, дистанционного управления и индикации рабочего состояния в пунктах управления;
радиомаяк дальномерный (РМД) и/или маркерные ОВЧ-радиомаяки (МРМ) с антенной системой, с системами контроля, дистанционного управления и индикации рабочего состояния в пунктах управления;
прибор контроля дальнего поля КРМ;
источник бесперебойного питания;
комплект ЗИП;
комплект эксплуатационной документации.
Примечание: Прибор контроля дальнего поля является обязательным при эксплуатации системы РМС категории III, является рекомендуемым для системы РМС категорий I и II.
2. Тактико-технические требования
2.1. Зона действия РМС должна обеспечиваться с помощью:
одночастотной системы, когда диаграмма направленности сигнала излучения по напряженности поля КРМ и ГРМ передается на одной несущей частоте;
двухчастотной системы, когда диаграмма направленности сигнала излучения по напряженности поля КРМ и ГРМ создается путем использования двух независимых диаграмм излучения, образуемых разнесенными несущими частотами.
2.2. РМС должны отвечать требованиям к целостности и непрерывности обслуживания, приведены в таблице:
| Уровень | КРМ или ГРМ | ||
|---|---|---|---|
| Целостность | Непрерывность | Средняя наработка на отказ | |
| 4 | 1 - 0,5·10-9 для любой единичной посадки | 1 - 2·10-6 для любого 30-секундного периода времени (КРМ), | 4000 (КРМ) |
| 15-секундного периода времени (ГРМ) | 2000 (ГРМ) | ||
Примечание:
2. Уровень 4 определяет требования к оборудованию системы РМС, обеспечивающему выполнение полетов на ВПП точного захода на посадку категории III.
3. Непрерывность обслуживания РМС - такое качество, которое связано с редкими перерывами в излучении сигнала. Уровень непрерывности обслуживания КРМ или РГМ выражается в виде вероятности наличия излучаемых сигналов наведения.
4. Целостность РМС - качество РМС, соответствующее степени уверенности в том, что обеспечиваемая данным средством информация является правильной. Уровень целостности КРМ или РГМ выражается в виде показателей вероятности отсутствия излучения ложных сигналов наведения.
2.3. Рабочие частоты КРМ и ГРМ должны применяться попарно, как указано в пункте 2.11.
2.4. Оборудование РМС должно иметь блокировку, позволяющую обеспечить:
исключение одновременной работы двух КРМ систем РМС при их установке с противоположных концов ВПП;
излучение КРМ только одной системы РМС при эксплуатации систем РМС на различных ВПП в одном и том же аэропорту и использовании ими одних и тех же спаренных частот;
прекращение излучения КРМ обеих систем РМС в течение времени не менее 20 с при переходе с одной системы РМС на другую.
2.5. Средний срок службы должен составлять не менее 15 лет.
2.6. Средняя наработка на отказ должна составлять не менее 10 000 час.
2.7. Среднее время восстановления должно быть не более 30 мин.
2.8. Время переключения на резерв КРМ, ГРМ, РМД-НП должно быть не более 1 с.
2.9. Требования к курсовому радиомаяку
Антенная система КРМ должна формировать двухлепестковую диаграмму направленности излучения сигнала несущей, модулированного по амплитуде сигналами тональных частот 90 и 150 Гц.
Сигнал несущей, модулированной частотой 150 Гц, должен преобладать справа от направления захода на посадку, а модулированной частотой 90 Гц - слева от него.
Допуск на отклонение частоты несущей передатчика должен составлять:
+/- 0,005% для одночастотного радиомаяка;
+/- 0,002% для двухчастотного радиомаяка.
Номинальная полоса частот, занимаемая несущими, должна располагаться симметрично по обе стороны от присвоенной частоты.
Для двухчастотной системы разнос несущих частот передатчиков КРМ должен быть не менее 5 кГц и не более 14 кГц.
Излучение КРМ должно быть горизонтально поляризованным. Уровень вертикально поляризованной составляющей электромагнитного поля должен быть таким, чтобы при кренах самолета +/- 20° погрешность РГМ была не более:
0,005 для КРМ категории III в пределах сектора, ограниченного +/- 0,02 РГМ;
0,016 для КРМ категории I;
0,008 для КРМ категории II при положении ВС на линии курса.
Уровень составляющих излучения, вызывающих флуктуации линии курса с частотой от 0,01 до 10 Гц, должен быть таким, чтобы он не приводил к изменению РГМ более 0,005 для КРМ категории III.
Зона действия
Зона действия КРМ в горизонтальной плоскости должна быть не менее 35° вправо и влево относительно линии курса, как показано на рисунке 1.
Примечание: Все углы и дальности в горизонтальной плоскости, используемые для указания диаграммы излучения КРМ, отсчитываются от центра антенной системы, сигналы которой используются в переднем секторе курса.
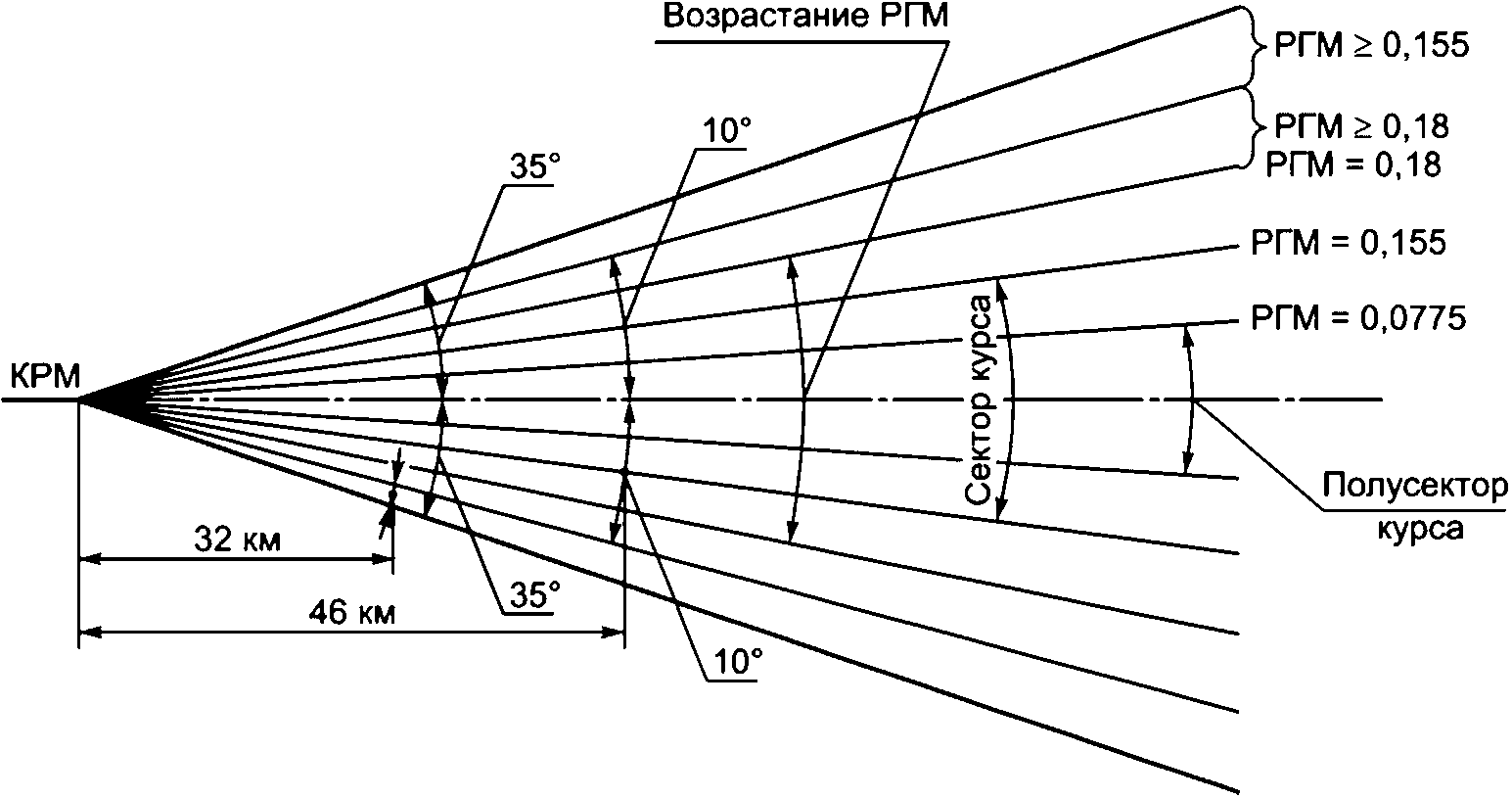
Рисунок 1 - Зона действия КРМ в горизонтальной плоскости
Зона действия КРМ по дальности? ? со стороны захода на посадку должна быть:
не менее 46 км в пределах горизонтального сектора +/- 10° относительно линии курса;
не менее 32 км в пределах горизонтального сектора от +/- 10° до +/- 35° относительно линии курса;
не менее 18,5 км за пределами +/- 35°, если обеспечивается такой сектор излучения.
Зона действия в вертикальной плоскости должна ограничиваться в верхней части прямой, проходящей через фазовый центр антенной системы под углом не менее 7° к горизонту.
Рекомендуется за пределами угла 7° сигналы ослаблять до возможно более низкого уровня.
Напряженность поля КРМ в любой точке зоны действия должна быть не менее 40 мкВ/м (минус 114 дБВт/м2).
Минимальная напряженность поля КРМ на глиссаде РМС категории I и в пределах сектора курса, начиная от точки, находящейся на расстоянии 18,5 км от курсового радиомаяка, до высоты 60 м над горизонтальной плоскостью, проходящей через порог ВПП, составляет не менее 90 мкВ/м (минус 107 дБВт/м2).
Минимальная напряженность поля КРМ на глиссаде РМС категории II в пределах сектора курса составляет не менее 100 микровольт на метр (минус 106 дБВт/м2) на расстоянии 18,5 км и возрастает до величины не менее 200 мкВ/м (минус 100 дБВт/м2) на высоте 15 м над горизонтальной плоскостью, проходящей через порог ВПП.
Минимальная напряженность поля КРМ на глиссаде РМС категории III в пределах сектора курса составляет не менее 100 мкВ/м (минус 106 дБВт/м2) на расстоянии 18,5 км и возрастает до величины не менее 200 мкВ/м (минус 100 дБВт/м2) на высоте 6 м над горизонтальной плоскостью, проходящей через порог ВПП. От этой точки до другой точки, находящейся на высоте 4 м над осевой линией ВПП и на расстоянии 300 м от порога ВПП в направлении КРМ, а затем на высоте 4 м вдоль ВПП в направлении КРМ напряженность поля составляет не менее 100 мкВ/м (минус 106 дБВт/м2).
Для КРМ отношение величин сигналов в пространстве одной несущей к величине сигналов другой в пределах зоны действия КРМ должно быть не менее 10 дБ.
Структура курса
Амплитуда искривлений линии курса КРМ категории I для вероятности 0,95 не должна превышать, как показано на рисунке 2:
0,031 РГМ от границы зоны действия до точки A;
величины, уменьшающейся по линейному закону от 0,031 РГМ в точке A до 0,015 РГМ в точке B;
0,015 РГМ от точки B до точки C.

Рисунок 2 - Допустимые амплитуды искривлений линий курса и глиссады для КРМ и ГРМ РМС категории I
Амплитуда искривлений линии курса КРМ категорий II и III для вероятности 0,95 не должна превышать, как показано на рисунке 3:
0,031 РГМ от границы зоны действия до точки A;
величины, уменьшающейся по линейному закону от 0,031 РГМ в точке A до 0,005 РГМ в точке B;
0,005 РГМ от точки B до опорной точки;
0,005 РГМ от опорной точки до точки D для КРМ категории III;
величины, увеличивающейся по линейному закону от 0,005 РГМ в точке D до 0,01 РГМ в точке E для КРМ категории III.
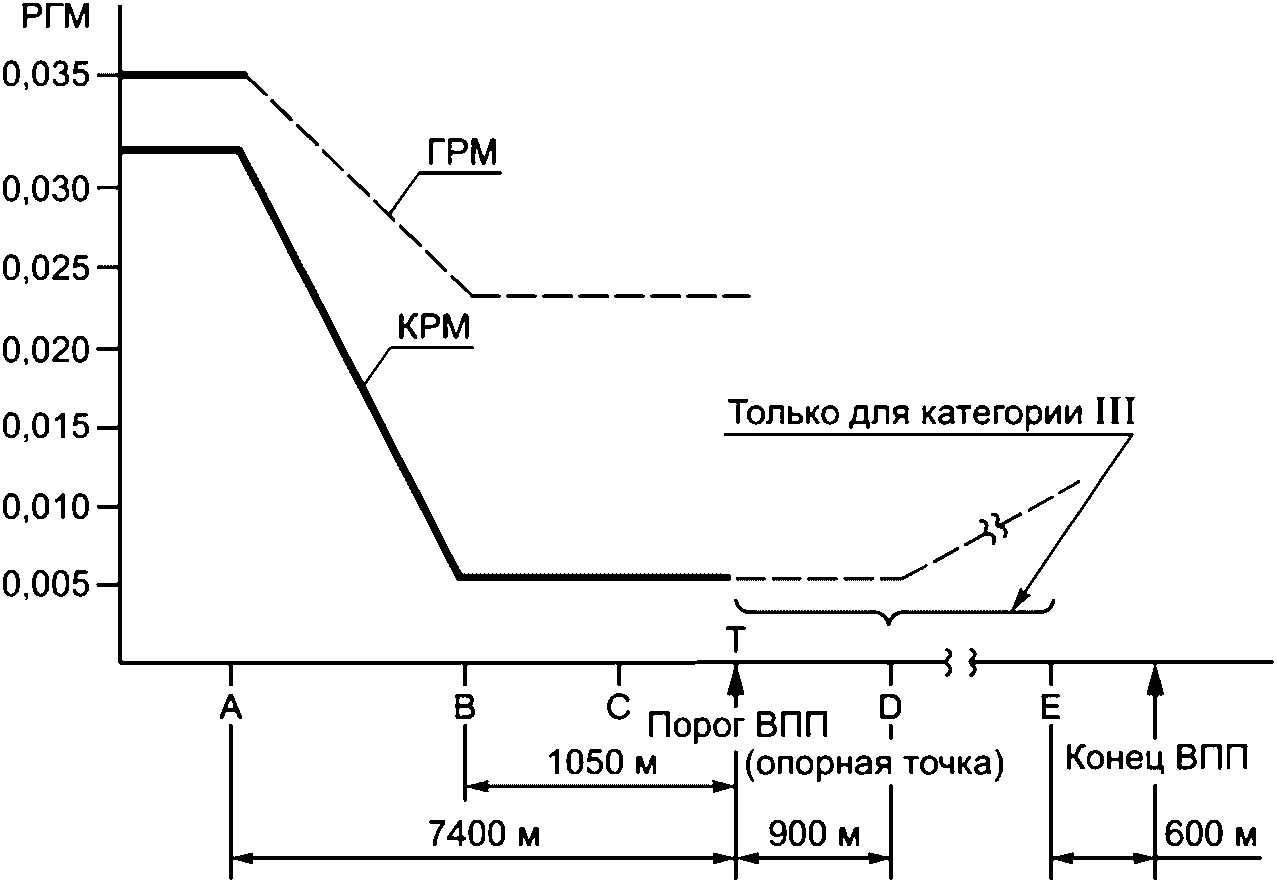
Рисунок 3 - Допустимые амплитуды искривлений линий курса и глиссады для КРМ и ГРМ РМС категорий II и III
Модуляция несущей частоты
Глубина модуляции сигнала несущей частоты сигналами тональных частот 90 и 150 Гц вдоль линии курса должна быть (20 +/- 2)%.
Допуск на отклонение тональных частот модуляции 90 и 150 Гц должен составлять:
+/- 2,5% для КРМ категории I;
+/- 1,5% для КРМ категории II;
+/- 1% для КРМ категории III.
Общее содержание гармонических составляющих каждой из модулирующих тональных частот 90 и 150 Гц должно быть не более 10%.
Величина второй гармоники тональной частоты 90 Гц для КРМ категории III должна быть не более 5%.
Глубина амплитудной модуляции сигнала несущей частоты частотой источника питания, ее гармониками или другими нежелательными составляющими для КРМ категории III должна быть не более 0,5%.
Гармоники частоты источника питания или нежелательные составляющие шума, которые могут взаимодействовать с сигналами тональных частот 90 и 150 Гц или их гармониками, создавая тем самым флуктуации линии курса для КРМ категории III, не должны приводить к изменению глубины модуляции сигнала несущей более чем на 0,05%.
Синхронизация по фазе тональных сигналов 90 и 150 Гц должна быть такой, чтобы демодулированные формы волн 90 и 150 Гц проходили через ноль в одном направлении в пределах 20° для КРМ категорий I и II и 10° для КРМ категории III в пределах полусектора курса.
Для КРМ синхронизация по фазе тонального сигнала 90 Гц одной несущей с тональным сигналом 90 Гц другой несущей и аналогично для тональных сигналов 150 Гц должна быть в пределах 20° для КРМ категорий I и II и 10° для КРМ категории III.
В зоне действия КРМ суммарная глубина модуляции сигналов несущей частоты сигналами тональных частот 90 и 150 Гц не должна превышать 60% и быть менее 30%.
При использовании КРМ для радиотелефонной связи суммарная глубина модуляции сигналов несущей частоты тональными сигналами 90 и 150 Гц не должна превышать 65% в пределах сектора +/- 10° и 78% в любой другой точке зоны действия.
Точность поддержания линии курса
Пределы установки и поддержания средней линии курса в опорной точке относительно линии ВПП:
+/- 10,5 м для КРМ категории I;
+/- 7,5 м для КРМ категории II;
+/- 3,0 м для КРМ категории III.
Среднюю линию курса КРМ категории II рекомендуется устанавливать и поддерживать в пределах, эквивалентных смещению +/- 4,5 м от осевой линии ВПП в опорной точке.
Чувствительность к смещению
Номинальная чувствительность к смещению в пределах полусектора в опорной точке должна быть 0,00145 РГМ/м.
Максимальный угол сектора курса не должен превышать 6°.
Пределы отклонения чувствительности к смещению от номинального значения должны составлять:
+/- 17% для КРМ категории I;
+/- 17% для КРМ категории II;
+/- 10% для КРМ категории III.
Для КРМ категории II рекомендуется поддерживать чувствительность в пределах +/- 10% от номинального значения.
РГМ в секторе:
от линии курса (где РГМ равна 0) до углов с РГМ, равной +/- 0,18, должна монотонно увеличиваться (в основном линейно);
от углов с РГМ, равной +/- 0,18, до углов +/- 10° должна составлять не менее 0,18;
от углов +/- 10° до +/- 35° должна составлять не менее 0,155.
Радиотелефонная связь
Для КРМ категории I и II рекомендуется одновременно с передачей навигационных и опознавательных сигналов обеспечивать работу канала радиотелефонной связи "земля - воздух" при условии, что такая связь никоим образом не мешает выполнению этим курсовым радиомаякам своей основной функции.
Курсовой радиомаяк категории III не обеспечивает работу такого канала, за исключением, когда при проектировании и эксплуатации данного средства принимаются особые меры для исключения возможности появления помех при обеспечении навигационного наведения.
Если обеспечивается канал радиотелефонной связи, то он отвечает следующим требованиям:
передача радиотелефонной информации на тех же частотах несущей или несущих высокой частоты, которые используются для выполнения основных функций курсового радиомаяка;
излучение является поляризованным в горизонтальной плоскости;
когда две несущие модулируются речевым сигналом, соответствующие фазы модуляции на двух несущих являются такими, что позволяют предотвратить возникновение нулей в зоне действия курсового радиомаяка.
Максимальная глубина модуляции сигналом несущей или несущих при работе радиотелефонного канала не должна превышать 50%, но аппаратура настраивается таким образом, чтобы:
отношение максимальной глубины модуляции при работе канала радиотелефонной связи к пиковой глубине модуляции опознавательным сигналом составляло примерно 9:1;
сумма составляющих модуляции сигналами канала радиотелефонной связи, навигационными и опознавательными сигналами не превышала 95%.
Частотные характеристики канала радиотелефонной связи должны находиться в пределах 3 дБ относительно уровня 1000 Гц в диапазоне от 300 до 3000 Гц.
Опознавание
Сигнал опознавания должен передаваться на несущей или несущих частотах и не должен влиять на выполнение основной функции радиомаяка.
Для опознавания используется излучение класса A2A, образуемое модуляцией несущей или несущих частот тональным сигналом с частотой (1020 +/- 50) Гц. Излучение сигналов опознавания должно быть поляризовано в горизонтальной плоскости. При модуляции двух несущих частот сигналами опознавания относительная фаза модуляции должна быть такой, чтобы она обеспечивала предотвращение возникновения других «нулей» в пределах зоны действия КРМ.
Глубина модуляции несущей или несущих частот сигналом опознавания должна быть в пределах от 5% до 15%.
Сигнал опознавания должен передаваться международным кодом Морзе и состоять из трех или четырех букв, первая из которых - «I», а последующие - код аэродрома или ВПП.
Скорость передачи сигнала опознавания должна составлять примерно семь слов в минуту, и он должен повторяться не менее шести раз в минуту через равные интервалы в течение всего времени, когда КРМ используется для обеспечения полетов.
Примечание: При невозможности выполнения основной функции (например, при снятии навигационных сигналов, ремонте или настройке и испытаниях) сигнал опознавания не излучается.
Контроль
Система автоматического контроля должна передавать предупреждение в пункты управления и обеспечивать или прекращение излучения, или снятие сигналов модуляции 90 и 150 Гц и опознавания с несущей частоты, или переход на более низкую категорию (для категорий II и III) в течение времени не более:
10 с для КРМ категории I,
5 с для КРМ категории II,
2 с для КРМ категории III;
при возникновении любого из следующих условий:
а) смещение средней линии курса относительно осевой линии ВПП в опорной точке более:
0,5 м для КРМ категории I или линейного эквивалента 0,015 РГМ (берется меньшее значение),
7,5 м для КРМ категории II,
6 м для КРМ категории III;
б) уменьшение мощности излучения до 50% от установленной для КРМ с одной несущей при условии, что КРМ продолжает отвечать требованиям по минимальной напряженности поля на глиссаде РМС I категории в пределах зоны действия;
в) уменьшение мощности излучения для каждой несущей до 80% от установленной для КРМ с двумя несущими. Допускается уменьшение мощности излучения от 80% до 50% при условии, что КРМ продолжает отвечать требованиям к напряженности поля, структуре курса и модуляции несущей;
г) изменение чувствительности к смещению КРМ от номинального значения на величину более 17%;
д) отказ самой системы контроля.
Для КРМ, основные функции которых обеспечиваются путем использования двухчастотной системы, условия, требующие включения тревожной сигнализации, должны предусматривать случай, когда РГМ в требуемой зоне действия за пределами +/- 10° от линии курса, исключая сектор обратного курса, уменьшается ниже 0,155.
Рекомендуется обеспечивать время срабатывания системы контроля для КРМ категории II - 2 с, КРМ категории III - 1 с.
Аппаратура контроля дальнего поля должна:
функционировать независимо от объединенных приборов контроля и аппаратуры контроля ближнего поля;
обеспечивать сигнализацию в пункт управления об искажении сигнала курсового радиомаяка.
Примечание: Под искажением сигнала понимается изменение положения линии курса КРМ;
обеспечивать выдачу информации в пункт управления о величине:
разности глубин модуляции,
суммарной глубины модуляции,
уровня радиочастотного сигнала;
обеспечивать уменьшение воздействия помех на сигнал аппаратуры контроля дальнего поля.
Примечание: Для уменьшения воздействия помех на сигнал аппаратуры контроля могут использоваться один или несколько из следующих методов:
применение устройства временной задержки, регулируемой в пределах от 30 до 240 с;
использование метода подтверждения, позволяющего передавать на систему управления информацию, не искаженную помехами от передачи;
применение фильтрации нижних частот.
В аппаратуре контроля дальнего поля рекомендуется реализовать:
контроль и сигнализацию в пункт управления чувствительности к смещению;
постоянную регистрацию характеристик сигнала дальнего поля.
2.10. Требования к глиссадному радиомаяку
Антенная система ГРМ должна формировать двухлепестковую диаграмму направленности излучения сигнала несущей, модулированного по амплитуде сигналами тональных частот 90 и 150 Гц.
Глубина модуляции несущей частоты сигналом 150 Гц должна преобладать ниже линии глиссады, а глубина модуляции несущей частоты сигналом 90 Гц - выше линии глиссады, по крайней мере до угла, составляющего 1,750.
ГРМ должен обеспечивать установку номинального угла наклона линии глиссады в пределах от 2° до 4° относительно горизонтали.
Угол наклона усредненной глиссады относительно номинальной должен поддерживаться в пределах ±0,0750 для ГРМ категорий I и II и ±0,040 для ГРМ категории III.
Допуск на отклонение частоты несущей должен составлять:
+/- 0,005% для одночастотного радиомаяка;
+/- 0,002% для двухчастотного радиомаяка.
Номинальная полоса частот, занимаемая несущими, должна располагаться симметрично по обе стороны от присвоенной частоты.
Разнос несущих частот для двухчастотных передатчиков должен быть в пределах от 4 до 32 кГц.
Излучение ГРМ должно быть поляризовано в горизонтальной плоскости.
Для ГРМ категорий II и III излучаемые сигналы не должны содержать составляющих излучения, вызывающих флуктуацию линии глиссады более чем на 0,02 РГМ от пика к пику в диапазоне от 0,01 до 10 Гц.
Зона действия
Зона действия в горизонтальной плоскости должна быть не менее 8° с каждой стороны от линии курса на расстоянии не менее 18,5 км от места установки антенны ГРМ.
Зона действия в вертикальной плоскости должна продолжаться, как показано на рисунке 4:
выше усредненной линии глиссады до угла не менее 1,750 относительно горизонтали;
ниже усредненной линии глиссады до угла не более 0,450 или до угла 0,300 относительно горизонтали для обеспечения гарантированного входа в глиссаду.
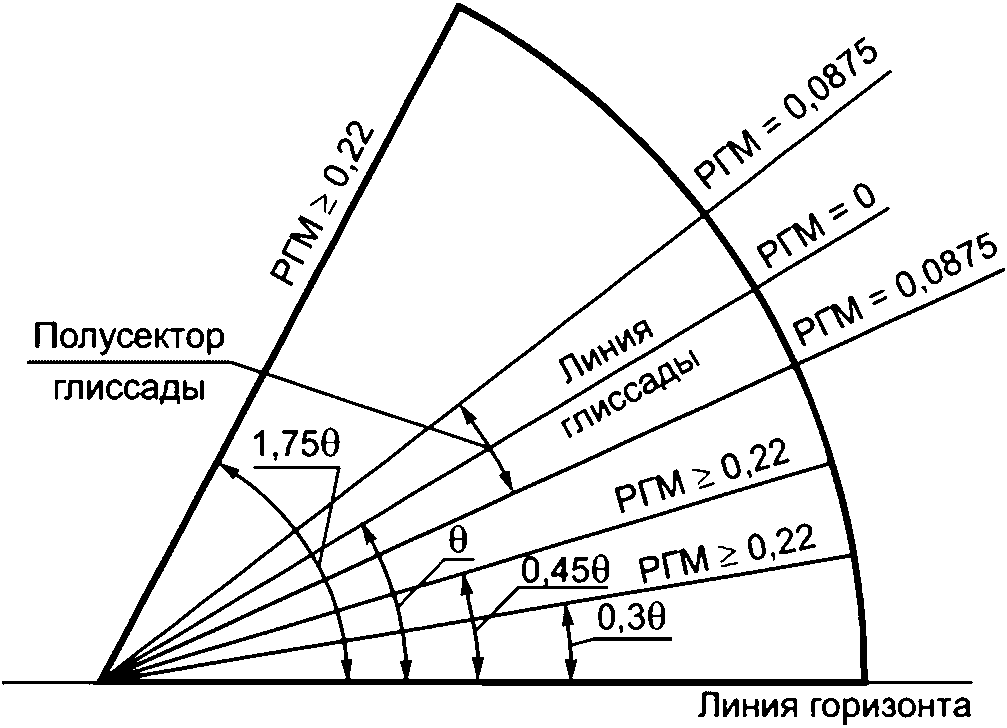
Рисунок 4 - Зона действия ГРМ в вертикальной плоскости
Напряженность поля в зоне действия должна быть не менее 400 мкВ/м (минус 95 дБВт/м2) и должна обеспечиваться до высоты 30 м для ГРМ категории I и 15 м для ГРМ категорий II и III над горизонтальной плоскостью, проходящей через порог ВПП.
Структура глиссады
Амплитуда искривлений глиссады для вероятности 0,95 не должна превышать:
а) для ГРМ категории I :
0,035 РГМ от границы зоны действия до точки C;
б) для ГРМ категорий II и III :
0,035 РГМ от границы зоны действия до точки A;
величины, уменьшающейся по линейному закону от 0,035 РГМ в точке A до 0,023 РГМ в точке B;
0,023 РГМ от точки B до опорной точки.
Модуляция несущей частоты
Глубина модуляции несущей частоты сигналами с частотой 90 и 150 Гц должна составлять (40 +/- 2,5)%.
Допуск на отклонение частоты модуляции 90 и 150 Гц должен составлять:
+/- 2,5% для ГРМ категории I (рекомендуемый допуск составляет +/- 1,5%);
+/- 1,5% для ГРМ категории II;
+/- 1% для ГРМ категории III.
Общее содержание гармонических составляющих в сигналах тональных частот 90 и 150 Гц должно быть не более 10%.
Величина второй гармоники в сигнале частоты 90 Гц для ГРМ категории III не должна превышать 5%.
Глубина модуляции несущей частоты частотой источника питания или ее гармониками или другими нежелательными составляющими для ГРМ категории III должна быть не более 1%.
Синхронизация по фазе сигналов тональных частот 90 и 150 Гц должна составлять не более 20° для ГРМ категорий I и II и не более 10° для ГРМ категории III.
Синхронизация по фазе сигналов частотой 90 и 150 Гц, модулирующих одну несущую, 90 и 150 Гц соответственно другую несущую, должна составлять не более 20° для ГРМ категорий I и II и не более 10° для ГРМ категории III.
Чувствительность к смещению
Номинальная чувствительность к угловому смещению ГРМ категории I соответствует РГМ, составляющей 0,0875 при угловом смещении выше и ниже глиссады между углами 0,070 и 0,10.
Номинальная чувствительность к угловому смещению ГРМ категории I должна соответствовать РГМ, составляющей 0,0875 при угловом смещении ниже глиссады под углом 0,120 при допуске ±0,020.
Верхний и нижний секторы должны быть, насколько это практически возможно, симметричными в указанных пределах.
Чувствительность к угловому смещению ГРМ категории II является симметричной настолько, насколько это практически возможно. Номинальная чувствительность к угловому смещению соответствует РГМ, составляющей 0,0875 при угловом смещении:
0,120 ниже глиссады при допуске ±0,020;
0,120 выше глиссады при допуске +0,020 и -0,050.
Номинальная чувствительность к угловому смещению ГРМ категории III соответствует РГМ, составляющей 0,0875 при угловых смещениях выше и ниже глиссады под углом 0,120 при допуске ±0,020.
Чувствительность к угловому смещению ГРМ относительно номинального значения должна поддерживаться в пределах:
+/- 25% для ГРМ категории I;
+/- 20% для ГРМ категории II;
+/- 15% для ГРМ категории III.
Изменение РГМ ниже линии глиссады до угла 0,300 должно быть плавным и увеличиваться до значения 0,22. Если РГМ достигает значения 0,22 при углах более 0,450, то значение РГМ должно быть не менее 0,22 вплоть до угла 0,450 или до угла 0,300для обеспечения гарантированного входа в глиссаду.
Контроль
Система автоматического контроля должна передавать предупреждение в пункты управления и обеспечивать прекращение излучения в течение времени не более 6 с для ГРМ РМС категории I и 2 с для ГРМ РМС категорий II и III при возникновении любого из следующих условий:
отклонение линии глиссады от номинального значения на величину более 0,0750 (вниз) или более 0,10 (вверх);
уменьшение мощности излучения до 50% от установленной при условии, что ГРМ продолжает отвечать требованиям к зоне действия, структуре курса и модуляции несущей для одночастотных маяков;
уменьшение мощности излучения для каждой несущей частоты до 80% от установленной при использовании ГРМ с двумя несущими частотами. Допускается уменьшение мощности излучения от 80% до 50% для каждой несущей частоты при условии, что ГРМ продолжает отвечать требованиям к зоне действия, структуре курса и модуляции несущей;
изменение угла между глиссадой и линией, проходящей ниже глиссады (преобладание 150 Гц) ГРМ категории I, при котором создается РГМ 0,0875, более чем на ±0,03750 или угловой эквивалент изменения чувствительности к смещению до значения, отличающегося на 25% от номинального значения, в зависимости от того, что больше;
изменение чувствительности к смещению ГРМ от номинального значения на величину, отличающуюся более чем на 25% для ГРМ категорий II и III;
снижение линии, проходящей ниже линии глиссады на уровне РГМ 0,0875 до угла, составляющего менее 0,74750 от горизонтали;
уменьшение РГМ до значения менее чем 0,175 в пределах указанной зоны действия ниже сектора глиссады;
отказ самой системы контроля.
2.11. Таблица спаривания частот передатчиков КРМ и ГРМ в РМС
Спаривание частот передатчиков курсового и глиссадного радиомаяков системы посадки РМС приведены в таблице:
| КРМ, МГц | ГРМ, МГц |
|---|---|
| 108,1 | 334,7 |
| 108,15 | 334,55 |
| 108,3 | 334,1 |
| 108,35 | 333,95 |
| 108,5 | 329,9 |
| 108,55 | 329,75 |
| 108,7 | 330,5 |
| 108,75 | 330,35 |
| 108,9 | 329,3 |
| 108,95 | 329,15 |
| 109,1 | 331,4 |
| 109,15 | 331,25 |
| 109,3 | 332,0 |
| 109,35 | 331,85 |
| 109,5 | 332,6 |
| 109,55 | 332,45 |
| 109,7 | 333,2 |
| 109,75 | 333,05 |
| 109,9 | 333,8 |
| 109,95 | 333,65 |
| 110,1 | 334,4 |
| 110,15 | 334,25 |
| 110,3 | 335,0 |
| 110,35 | 334,85 |
| 110,5 | 329,6 |
| 110,55 | 329,45 |
| 110,7 | 330,2 |
| 110,75 | 330,05 |
| 110,9 | 330,8 |
| 110,95 | 330,65 |
| 111,1 | 331,7 |
| 111,15 | 331,55 |
| 111,3 | 332,3 |
| 111,35 | 332,15 |
| 111,5 | 332,9 |
| 111,55 | 332,75 |
| 111,7 | 333,5 |
| 111,75 | 333,35 |
| 111,9 | 331,1 |
| 111,95 | 330,95 |
ПРИЛОЖЕНИЕ № 15
к Правилам (п. 25)
Требования к локальной контрольно-корректирующей станции (ЛККС)
ЛККС является подсистемой функционального дополнения наземного базирования глобальной навигационной спутниковой системы (GBAS) и предназначена для формирования и передачи воздушным судам дифференциальных поправок к псевдодальностям навигационных спутников и информации о целостности сигналов, излучаемых навигационными спутниками.
ЛККС с радиолинией VDB совместно с навигационными спутниками GNSS обеспечивает навигацию воздушного судна на маршрутах ОВД, в районе аэродрома и точный заход на посадку.
ЛККС с радиолинией VDL-4 совместно с навигационными спутниками GNSS обеспечивает навигацию воздушного судна на маршрутах ОВД и в районе аэродрома.
ТАКТИКО-ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
ОБЪЕМ ОБСЛУЖИВАНИЯ (ЗОНА ДЕЙСТВИЯ)
Минимальный объем обслуживания ЛККС для обеспечения захода на посадку, кроме случаев наличия углов закрытия, является следующим:
а) в боковом направлении: начиная от 140 м с каждой стороны от посадочной/фиктивной точки порога ВПП (LTP/FTP) и расширяющейся под углом  35о с каждой стороны траектории конечного этапа захода на посадку до удаления 28 км и под углом
35о с каждой стороны траектории конечного этапа захода на посадку до удаления 28 км и под углом  10о с каждой стороны траектории до удаления 37 км от порога ВПП;
10о с каждой стороны траектории до удаления 37 км от порога ВПП;
б) в вертикальной плоскости: в пределах упомянутой боковой зоны выше 7° или 1,75 усредненного значения угла глиссады (GPA) над горизонтом с началом координат в точке захвата глиссады (GPIP) до верхней границы, определяемой относительной высотой над порогом ВПП (НАТ) в 3000 м и 0,45 GPA выше горизонта или менее вплоть до 0,30 GPA, такого, который требуется, чтобы поддержать назначенную процедуру захвата усредненной глиссады. Нижняя граница составляет половину от самой низкой обеспечиваемой относительной высоты принятия решения или 3,7 м, в зависимости от того, какое значение больше.
Минимальный дополнительный объем обслуживания ЛККС для обеспечения заходов на посадку, включая автоматическую посадку и пробег по ВПП, и выполнения взлетов с наведением является следующим:
а) в горизонтальной плоскости: в пределах сектора, включающего ширину ВПП, начиная от дальнего конца ВПП, и параллельно осевой линии ВПП по направлению к LTP до минимального объема обслуживания, описанного в п. 1.1.1;
б) в вертикальной плоскости: между двумя горизонтальными поверхностями, одна из которых находится на высоте 3,7 м, а другая - на высоте 30 м над осевой линией ВПП до минимального объема обслуживания, описанного в п. 1.1.1.
Объем обслуживания для определения местоположения должен обеспечиваться в пространстве, определенном радиусом 100 км, от места установки ЛККС (при высоте полета воздушного судна 10 км).
Зона приема спутниковой информации должна быть от 0° до 360° по азимуту и от 5° до 90° по углу места над местной горизонтальной плоскостью антенны любого опорного приемника ЛККС.
РАДИОЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Для передачи сообщений, сформированных ЛККС, должна использоваться радиолиния VDB. Радиочастотные характеристики радиолинии VDB ЛККС должны соответствовать требованиям, приведенным в п. 1.2.3.
Рекомендация. Для передачи сообщений, сформированных ЛККС, может использоваться ОВЧ радиолиния режима 4 (далее - VDL-4). Радиочастотные характеристики радиолинии VDL-4 ЛККС должны соответствовать требованиям, приведенным в п. 1.2.4.
Радиочастотные характеристики радиолинии VDB:
Несущая частота должна находиться в пределах полосы частот 108,025 - 117,950 МГц с сеткой частот 25 кГц.
Стабильность несущей частоты должна находиться в пределах ± 0,0002% от номинального значения.
Поляризация сигнала должна быть горизонтальной (HPOL).
Рекомендация. Поляризация сигнала может быть эллиптической, включающей компоненты горизонтальной (HPOL) и вертикальной поляризации (VPOL).
Сообщения ЛККС должны формироваться в виде последовательности символов, каждый из которых состоит из трех последовательных битов сообщения. В случае необходимости формирования последнего 3-битового символа сообщения конец сообщения дополняется одним или двумя наборами битов-заполнителей, установленных в нуль. Символы преобразуются в D8PSK посредством сдвига фазы несущей частоты (???) в соответствии с таблицей 1:
Таблица 1 - Кодирование данных
| Биты сообщения | Символ - фазовый сдвиг | ||
|---|---|---|---|
| I3K-2 | I3K-1 | I3K | ??? |
| 0 | 0 | 0 | 0?/4 |
| 0 | 0 | 1 | 1?/4 |
| 0 | 1 | 1 | 2?/4 |
| 0 | 1 | 0 | 3?/4 |
| 1 | 1 | 0 | 4?/4 |
| 1 | 1 | 1 | 5?/4 |
| 1 | 0 | 1 | 6?/4 |
| 1 | 0 | 0 | 7?/4 |
Примечания:
1. Фаза несущей частоты для k-го символа ( ?? ) описывается выражением: ?? = ??-1 + ??? .
2. Сигнал D8PSK может быть получен путем суммирования двух квадратурных РЧ-сигналов, модулированных по амплитуде с независимым подавлением несущей импульсами, отфильтрованными в полосе частот модулирующего сигнала.
3. Ij представляет собой j-й бит подлежащего передаче пакета, где I1 - первый бит установочной последовательности.
Выходной сигнал дифференциального фазового кодирующего устройства должен формироваться фильтром формирования импульса. Несущая частота должна модулироваться выходом s(t) этого фильтра.
Величина вектора ошибки передаваемого сигнала не должна превышать 6,5 % от среднеквадратического значения (1?).
Скорость передачи должна составлять 10500 символов/с  0,005% (номинальная скорость передачи информации - 31500 бит/с).
0,005% (номинальная скорость передачи информации - 31500 бит/с).
Максимальная мощность, измеренная во время передачи в любом несанкционированном временном интервале в полосе частот 25 кГц с центром на частоте данного канала, не должна превышать -105 дБ относительно разрешенной мощности передатчика.
Эффективная изотропно излучаемая мощность (EIRP) в пределах минимального объема обслуживания ЛККС для обеспечения захода на посадку должна обеспечивать:
минимальную напряженность поля горизонтальной составляющей сигнала (HPOL) 215 мкВ/м (- 99 дБВт/м2);
максимальную напряженность поля HPOL 0,879 В/м (- 27 дБВт/м2).
Примечание: Напряженность поля измеряется как средняя за период времени синхронизации и решения неоднозначности пакета.
Эффективная изотропно излучаемая мощность (EIRP) в пределах минимального дополнительного объема обслуживания ЛККС для обеспечения заходов на посадку, включая автоматическую посадку и пробег по ВПП, выполнения взлетов с наведением должна обеспечивать минимальную напряженность поля горизонтальной составляющей сигнала (HPOL) 215 мкВ/м (- 99 дБВт/м2) ниже 11 м до 3,7 м над поверхностью ВПП и 650 мкВ/м (- 89,5 дБВт/м2) на высоте 11 м и более над поверхностью ВПП.
Рекомендация. Эффективная изотропно излучаемая мощность (EIRP) в пределах зоны объема обслуживания ЛККС при передаче эллиптически поляризованного сигнала должна обеспечивать:
минимальную напряженность поля горизонтальной составляющей сигнала (HPOL) в соответствии с п.1.2.3.10;
минимальную напряженность поля вертикальной составляющей сигнала (VPOL) 136 мкВ/м (- 103 дБВт/м2);
максимальную напряженность поля VPOL 0,555 В/м (- 31 дБВт/м2).
Примечание:
1. Напряженность поля измеряется как средняя за период времени синхронизации и решения неоднозначности пакета.
2. Минимальные и максимальные значения напряженности поля относятся к минимальному расстоянию от антенны передатчика 80 м и границе зоны действия (43 км).
Уровень мощности, излучаемой на соседних каналах, при передаче ЛККС, измеренный в полосе частот 25 кГц с центром в i-ом соседнем канале, не должен превышать указанный в таблице 2:
Таблица 2 - Уровень мощности, излучаемой на соседних каналах
| Канал | Относительная мощность, дБиК | Максимальная мощность, дБм |
|---|---|---|
| 1-й соседний | - 40 | - 12 |
| 2-й соседний | - 65 | - 13 |
| 4-й соседний | - 74 | - 22 |
| 8-й соседний | - 88,5 | - 36,5 |
| 16-й соседний | - 101,5 | - 49,5 |
| 32-й соседний | - 105 | - 53 |
| 64-й соседний | - 113 | - 61 |
| 76-й соседний и далее | - 115 | - 63 |
Примечание:
1. Максимальная мощность применяется для мощности передатчика более 150 Вт.
2. Соотношение между единичными соседними точками выше указанных соседних каналов является линейным.
Нежелательные излучения, включающие побочные и внеполосные излучения, должны соответствовать уровням в соответствии с таблицей 3:
Таблица 3 - Нежелательные излучения
| Частота | Относительный уровень нежелательного излучения | Максимальный уровень нежелательного излучения |
|---|---|---|
| 9 ? 150 кГц | - 93 дБиК | - 55 дБм/1 кГц |
| 150кГц ? 30 МГц | - 103 дБиК | - 55 дБм/10 кГц |
| 30 ? 106,125 МГц | - 115 дБиК | - 57 дБм/100 кГц |
| 106,425 МГц | - 11З дБиК | - 55 дБм/100 кГц |
| 107,225 МГц | - 105 дБиК | - 47 дБм/100 кГц |
| 107,625 МГц | - 101,5 дБиК | - 53,5 дБм/10 кГц |
| 107,825 МГц | - 88,5 дБиК | - 40,5 дБм/10 кГц |
| 107,925 МГц | - 74 дБиК | - 36 дБм/1 кГц |
| 107,9625 МГц | - 71 дБиК | - 33 дБм/1 кГц |
| 107,975 МГц | - 65 дБиК | - 27 дБм/1 кГц |
| 118,000 МГц | - 65 дБиК | - 27 дБм/1 кГц |
| 118,0125 МГц | - 71 дБиК | - 33 дБм/1 кГц |
| 118,050 МГц | - 74 дБиК | - 36 дБм/1 кГц |
| 118,150 МГц | - 88,5 дБиК | - 40,5 дБм/10 кГц |
| 118,350 МГц | - 101,5 дБиК | - 53,5 дБм/10 кГц |
| 118,750 МГц | - 105дБиК | - 47 дБм/100 кГц |
| 119,550 МГц | - 113 дБиК | - 55 дБм/100 кГц |
| 119,850 МГц ? 1 ГГц | - 115 дБиК | - 57 дБм/100 кГц |
| 1 ? 1,7 ГГц | - 115 дБиК | - 47 дБм/1 кГц |
Примечание:
1. Максимальная мощность применяется для мощности передатчика более 150 Вт.
2. Относительный уровень нежелательных излучений рассчитывается с использованием одной и той же ширины полосы для полезных и нежелательных сигналов.
3. Соотношение между одиночными соседними точками выше указанных соседних каналов является линейным.
Полная мощность любой гармоники ОВЧ-передачи данных или дискретного сигнала должна быть не более - 53 дБм.
Мощность передатчика VDB не должна превышать 50 Вт.
Радиочастотные характеристики радиолинии VDL-4.
Примечание: Требование обязательно при реализации п. 1.2.2.
Несущая частота должна находиться в пределах полосы частот 118,000 - 136,975 МГц с сеткой частот 25 кГц.
Стабильность несущей частоты должна находиться в пределах ± 0,0002% от номинального значения.
Поляризация сигнала должна быть вертикальная.
Передатчик должен обеспечивать передачу данных в классе излучения F1D методом частотной манипуляции с гауссовой фильтрацией спектра сигнала (GFSK) с применением NRZI-кодирования. Скорость передачи данных в радиоканале 19200 бит/с, параметр ВТ фильтра Гаусса 0,28±0,03, индекс модуляции 0,25±0,03.
Примечание: NRZI-кодирование означает, что тональный сигнал не изменяется при передаче бита «1» и изменяется на противоположный при передаче бита «0».
Средняя выходная мощность, измеряемая на выходе передатчика при его работе на нагрузку 50 Ом без усреднения по временным интервалам между передачами, должна быть не менее 42 дБм.
Мощность любого паразитного излучения не должна превышать значений, указанных в таблице 4:
Таблица 4 - Мощность паразитных излучений
| Контрольный частотный диапазон | Мощность паразитных излучений в режиме «передатчик выключен» | Мощность паразитных излучений в режиме «передатчик включен» | Опорная частота пропускания |
|---|---|---|---|
| 9 кГц - 150 кГц | - 57 дБм | - 36 дБм | В = 1 кГц |
| 150 кГц - 1 ГГц* | - 57 дБм | - 36 дБм для гармоник - 46 дБм для негармонических паразитных излучений | В = 10 кГц |
| 1ГГц - 4 ГГц | - 47 дБм | - 30 дБм для гармоник - 40 дБм для негармонических паразитных излучений | В = 10 кГц |
Примечание: * За исключением полосы +/-1 МГц относительно несущей частоты в режиме «передатчик включен».
Мощность излучения на соседних каналах относительно мощности несущей частоты не должна превышать:
в полосе 25 кГц первого соседнего канала 2 дБм;
в полосе 16 кГц первого соседнего канала - 18 дБм;
в полосе 25 кГц второго соседнего канала - 28 дБм;
в полосе 25 кГц четвертого соседнего канала - 38 дБм.
ВЧ мощность, измеренная в полосе пропускания 25 кГц, должна снижаться с минимальной скоростью 5дБ на октаву от четвертого соседнего канала до максимального значения минус 53 дБм.
Эффективная излучаемая мощность (ERP) в пределах зоны объема обслуживания ЛККС должна обеспечивать:
минимальную напряженность поля 20 мкВ/м (- 120 дБВт/м2);
максимальную напряженность поля 0,71 В/м (- 29 дБВт/м2).
Примечание: 1. Напряженность поля измеряется как средняя за период времени синхронизации и решения неоднозначности пакета.
2. Минимальные и максимальные значения напряженности поля относятся к минимальному расстоянию от антенны передатчика 80 м и границе зоны действия (43 км).
СТРУКТУРА ДАННЫХ
Структура данных радиолинии VDB
Синхронизация передатчика
Для передачи данных должен использоваться метод многостанционного доступа с временным разделением каналов (TDMA) с фиксированной длительностью кадра (500 мс). В каждой односекундной эпохе UTC должны содержаться два таких кадра. Первый из указанных кадров должен начинаться в начале эпохи UTC, а второй начинается спустя 0,5 сек. после начала эпохи UTC. Кадр должен мультиплексироваться по времени таким образом, чтобы он состоял из восьми отдельных временных интервалов (А-Н) длительностью 62,5 мс.
В каждом установленном временном интервале должно содержаться не более одного пакета. Чтобы инициировать использование временного интервала (слота), ЛККС должна передавать пакет в данном временном интервале в каждом из пяти последовательных кадров. Для каждого используемого временного интервала наземная подсистема должна передавать пакет как минимум в одном из каждых пяти последовательных кадров.
Примечание: Пакеты содержат не менее одного сообщения и могут иметь переменную длину, вплоть до максимально допустимой, в рамках временного интервала, как определено в п.1.3.1.6.
На каждый пакет должен приходиться временной интервал 62,5 мс.
Пакет должен начинаться через 95,2 мкс после начала временного интервала с допуском  95,2 мкс.
95,2 мкс.
Рекомендация. Для ЛККС, использующей эллиптическую поляризацию сигнала, начало синхронизирующей и решающей неоднозначность части пакета, передаваемого с горизонтальной поляризацией, должно приходиться на 10-й микросекундный интервал с начала пакета, передаваемого с вертикальной поляризацией.
Мощность передатчика должна достигать 90% уровня мощности установившегося режима в течение 190,5 мкс после начала пакета (2 символа). Мощность передатчика должна стабилизироваться на уровне установившегося режима в течение 476,2 мкс после начала пакета (5 символов).
После последнего информационного символа, переданного в рамках установленного временного интервала, уровень выходной мощности передатчика должен снижаться по меньшей мере на 30 дБ относительно уровня мощности установившегося режима в течение 285,7 мкс (3 символа).
Организация пакетов и кодирование
Каждый пакет должен включать элементы данных, представленные в табл. 5.
Таблица 5 - Содержание данных пакета
| Элемент | Содержание данных | Число битов |
|---|---|---|
| Начало пакета | Все нули | 15 |
| Стабилизация мощности | ||
| Синхронизация и разрешение неоднозначности | п. 2.3.8 | 48 |
| Скремблированные данные: | ||
| идентификатор временного интервала станции (SSID) | Д.3.1 | 3 |
| длина передачи | Д.3.2 | 17 |
| FEC установочной последовательности | Д.3.3 | 5 |
| данные приложения | Д.3.4 | До 1776 |
| FEC приложения | Д.3.5 | 48 |
| биты заполнения | Д.3.7 | 0 - 2 |
Кодирование сообщений должно подчиняться следующей последовательности: форматирование данных приложения, формирование FEC установочной последовательности, формирование FEC приложения и скремблирование битов.
Поле синхронизации и разрешения неоднозначности должно определяться приведенной 48-разрядной последовательностью с передачей первым правого старшего разряда:
010 001 111 101 111 110 001 100 011 101 100 000 011 110 010 000.
Структура данных радиолинии VDL-4
Сообщения ЛККС должны формироваться в виде пакета и передаваться в одном или нескольких последовательных временных слотах. Длительность одного слота определяется делением временного интервала 60 секунд на 4500 равных интервала. Каждый пакет должен состоять из следующих сегментов:
стабилизации мощности передачи (А) продолжительностью 16 символьных периодов;
синхронизации и неопределенности разрешения (В). Сегмент синхронизации должен состоять из обучающей 24-х битной последовательности 0101 0101 0101 0101 0101 0101, передаваемой слева направо. Первый передаваемый бит в обучающей последовательности должен иметь вид колебания высокого тона и передаваемый тональный сигнал должен изменяться на противоположный перед передачей 0;
данных (С);
затухания мощности передатчика (D);
интервала безопасности на распространение (Е).
Рисунок 1 - Временная диаграмма передачи однослотового сообщения
Формат блоков сообщений, передаваемых по радиолиниям VDB и VDL-4
Блоки сообщения должны включать заголовок блока сообщения, сообщение и 32-битовый проверочный избыточный циклический код (CRC). Структура блока сообщения должна соответствовать таблице 6:
Таблица 6 - Структура блока сообщения ЛККС
| Блок сообщения | Биты |
|---|---|
| Заголовок блока сообщения | 48 |
| Сообщение | До 1696 вкл. |
| CRC | 32 |
Все параметры со знаком представляются как числа с точным двоичным дополнением, а все параметры без знака представляются как числа с фиксированной точкой без знака. Масштабирование данных должно соответствовать представленному в таблицах сообщений.
Заголовок блока сообщения должен состоять из идентификатора блока сообщения, идентификатора ЛККС (ID), идентификатора типа сообщения и параметра длины сообщения, как показано в таблице 7:
Таблица 7 - Формат заголовка блока сообщений
| Поле данных | Биты |
|---|---|
| Идентификатор блока сообщения | 8 |
| Идентификатор ID | 24 |
| Идентификатор типа сообщения | 8 |
| Длина сообщения | 8 |
Идентификатором блока сообщения (MBI) является 8-битовый идентификатор для рабочего режима блока сообщения ЛККС, кодируемый как 1010 1010 для нормального сообщения или 1111 1111 для тестового сообщения.
Идентификатором ID является 4-символьная идентификация ЛККС. Каждый символ должен кодироваться с использованием битов с b1 по b6 его представления в Международном алфавите №5 (IA-5). Для каждого символа бит b1 должен передаваться первым, при этом для каждого символа передаются 6 битов. Должны использоваться только прописные буквы, цифры и "пробел" IA-5. Первым передается правый старший символ. Для 3-символьного идентификатора ID правый старший символ (передается первым) представляет собой "пробел" IA-5.
Идентификатором типа сообщения должна быть цифровая метка, идентифицирующая содержание сообщения.
Длина сообщения должна быть в 8-битовых байтах, включая 6-байтовый заголовок блока сообщения, само сообщение и 4-байтовый CRC код.
Длина кода CRC должна составлять k = 32 бита.
Порождающий полином CRC имеет следующий вид:
G(x) = x32 + x31 + x24 + x22 + x16 + x14 + x8 + x7 + x5 + x3 +x + 1.
Информационное поле CRC, M(x), описывается выражением:

M(x) формируется из 48-битового заголовка блока сообщения ЛККС и всех битов сообщения переменной длины, исключая CRC. Биты устанавливаются в порядке передачи таким образом, что mi соответствует первому передаваемому биту заголовка блока сообщения, а mn соответствует последнему передаваемому биту из (n-48) битов сообщения.
CRC строится таким образом, что r1 представляет собой первый передаваемый бит, а r32 - последний передаваемый бит.
СОДЕРЖАНИЕ ДАННЫХ
В ЛККС должны формироваться следующие типы сообщений:
1 - поправки к псевдодальностям, сглаженные с интервалом 100 с;
2 - информация о ЛККС;
3 - нулевое сообщение;
4 - информация о конечном участке захода на посадку при обеспечении точного захода на посадку(FAS);
5 - данные о прогнозируемой эксплуатационной готовности дальномерного источника.
11 - поправки к псевдодальности, сглаженные с интервалом 30 с;
101 - поправки к псевдодальности GRAS.
Примечание: Необходимость формирования конкретных типов сообщений в зависимости от вида обслуживания, обеспечиваемого ЛККС, приведено в таблице 8.
ЭКСПЛУАТАЦИОННЫЕ ХАРАКТЕРИСТИКИ
Точность.
Точность измерения по горизонтали не должна превышать 16 м, точность измерения по вертикали не должна превышать 4 м (с доверительной вероятностью 0,95).
Должно быть определено и указано в эксплуатационной документации буквенное обозначение точности ЛККС.
Целостность.
Риск потери целостности для ЛККС
Риск потери целостности сигнала в пространстве при заходе на посадку при использовании ЛККС, классифицированной как FAST A, B или С, должен составлять менее 1,5 ? 10-7 на заход на посадку.
Примечание:
1.. Риск потери целостности, для ЛККС, представляет собой подмножество риска потери целостности сигнала GBAS в пространстве и включает отказы ЛККС и основной орбитальной системы (систем), кроме риска потери целостности уровня защиты, указанного в п. 1.5.2.1.8 Риск потери целостности ЛККС включает в себя риск потери целостности мониторинга спутникового сигнала, указанного в п. 1.7.3.
2. Риск потери целостности сигнала GBAS в пространстве определяется как вероятность того, что ЛККС обеспечивает информацию, которая при обработке безотказным приемником с использованием воздушным судном данных ЛККС, полученных в объеме обслуживания, дает боковую или вертикальную относительную ошибку местоположения, превышающую допустимые пределы, без оповещения в течение периода, превышающего максимальную задержку срабатывания сигнализации при потере целостности сигнала в пространстве. Превышающая допустимые пределы боковая или вертикальная относительная ошибка местоположения определяется как погрешность, которая превышает уровень защиты при обслуживании при заходе на посадку с использованием GBAS и, если передается дополнительный блок данных I, предельную погрешность местоположения в эфемеридах.
Риск потери целостности сигнала в пространстве при заходе на посадку при использовании ЛККС, классифицированной как FAST D, вследствие любых причин, кроме погрешностей, привнесенными аномальными ионосферными условиями, должен составлять менее 1,5 ? 10-7 на заход на посадку.
Примечание:
1. Риск потери целостности, для ЛККС, классифицированной как FAST D, представляет собой подмножество риска потери целостности сигнала GBAS в пространстве и включает отказы ЛККС и основной орбитальной системы (систем), кроме риска потери целостности уровня защиты, указанного в п. 1.5.2.1.8.
2. Риск потери целостности сигнала GBAS в пространстве для GAST D определяется как вероятность того, что ЛККС обеспечивает информацию, которая при обработке безотказным приемником с использованием воздушным судном данных ЛККС, полученных в объеме обслуживания в отсутствие ионосферных аномалий, дает боковую или вертикальную относительную ошибку местоположения, превышающую допустимые пределы, без оповещения в течение периода, превышающего максимальную задержку срабатывания сигнализации при потере целостности сигнала в пространстве. Превышающая допустимые пределы боковая или вертикальная относительная ошибка местоположения определяется как погрешность, которая превышает уровень защиты при обслуживании при заходе на посадку с использованием GBAS и предельную погрешность местоположения в эфемеридах. Для GAST D превышающие допустимые пределы условия, вызванные аномальными ионосферными погрешностями, исключаются из риска потери целостности, т.к. риск вследствие ионосферных аномалий был отнесен за счет бортового сегмента и снижен им.
Вероятность того, что ЛККС, классифицированная как FAST D, будет самостоятельно генерировать и передавать несоответствующую требованиям информацию в течение более 1,5 с, должна составлять не более 1?10-9 на одну любую посадку.
Примечание:
1. Данное дополнительное требование к риску потери целостности, назначенному ЛККС FAST D, определяется с точки зрения вероятности того, что внутренние отказы ЛККС приведут к генерированию несоответствующей требованиям информации. Термин «несоответствующая требованиям информация» в данном контексте определяется в рамках предусмотренной функции ЛККС обеспечивать посадки по минимумам категории III. Например, несоответствующая требованиям информация включает любой передаваемый сигнал или передаваемую информацию, которые не контролируются в соответствии с базисом.
2. Окружающие условия (аномальные особенности ионосферы, тропосферы, радиочастотные помехи, многолучевое распространение сигнала ГНСС и т.д.) не относятся к отказам; тем не менее, в это требование включены отказы оборудования наземных подсистем, используемого для мониторинга или снижения влияния таких окружающих условий. Похожим образом, отказы дальномерных источников основной орбитальной системы (систем) не включены в данное требование; однако в него включена возможность наземной подсистемы обеспечивать мониторинг этих дальномерных источников. Требования к мониторингу отказов дальномерных источников и ионосферных окружающих условий приводятся отдельно в п.п. 1.7.3.3, 1.7.3.4 и 1.7.4.
3. Отказы, имеющие место в наземных приемниках, используемых для генерирования передаваемых поправок, не включаются в данное требование, если они возникают в любом одном и только одном приемнике одновременно. Такие отказы ограничиваются требованиями п. 1.5.2.1.8 и соответствующим требованием к риску потери целостности.
Максимальная задержка срабатывания сигнализации ЛККС при обслуживании при заходе на посадку, классифицированной как FAST A, B, C или D, должна составлять не более 3 с для всех требований целостности сигнала в пространстве, когда передаются сообщения типа 1.
Примечание:
1. Задержка срабатывания сигнализации ЛККС представляет собой интервал времени между моментом, когда боковая или вертикальная относительная погрешность положения превышает допустимые пределы, и моментом передачи последнего бита сообщения, содержащего данные по целостности, отражающие данную ситуацию.
2. Для ЛККС FAST D применяются дополнительные требования к мониторингу диапазона дальности п.п. 1.7.3.3, 1.7.3.4 и 1.7.4. В этих пунктах для ЛККС определяются временные пределы для обнаружения и оповещения получателя на борту о превышающих пределы дифференциальных погрешностях псевдодальности.
Максимальная задержка срабатывания сигнализации ЛККС при обслуживании при заходе на посадку, классифицированной как FAST A, при потере целостности сигнала в пространстве должна составлять не более 5,5 с, когда передаются сообщения типа 101.
Риск потери целостности ЛККС при определении местоположения должен составлять менее 9,9?10-8 в час.
Примечание:
1. Риск потери целостности для ЛККС, представляет собой подмножество риска потери целостности сигнала GBAS в пространстве и включает отказы ЛККС и основной орбитальной системы (систем), кроме риска потери целостности уровня защиты, указанного в п. 1.5.2.1.11. Риск потери целостности ЛККС включает в себя риск потери целостности мониторинга спутникового сигнала, указанного в п. 1.7.3.
2. Риск потери целостности сигнала GBAS в пространстве представляет собой вероятность того, что ЛККС обеспечивает информацию, которая при обработке безотказным приемником с использованием воздушным судном данных ЛККС дает горизонтальную относительную ошибку местоположения, превышающую допустимые пределы, без оповещения в течение периода, превышающего максимальную задержку срабатывания сигнализации. Горизонтальная относительная ошибка местоположения, превышающая допустимые пределы, определяется как погрешность, которая превышает уровень горизонтальной защиты и предельную горизонтальную погрешность местоположения в эфемеридах.
Максимальная задержка срабатывания сигнализации ЛККС при определении местоположения составляет не более 3 с, когда передаются сообщения типа 1, и не более 5,5 с, когда передаются сообщения типа 101.
Примечание:. Задержка срабатывания сигнализации ЛККС представляет собой интервал времени между моментом, когда горизонтальная относительная погрешность положения превышает допустимые пределы, и моментом передачи последнего бита сообщения, содержащего данные по целостности, отражающие данную ситуацию.
Риск потери целостности уровня защиты ЛККС при обслуживании при заходе на посадку с использованием GBAS должен составлять менее 5?10-8 на заход на посадку.
Примечание:
1. Риск потери целостности уровня защиты при обслуживании при заходе на посадку с использованием GBAS представляет собой риск потери целостности вследствие необнаруженных ошибок в решении навигационной задачи по определению местоположения, сглаженном с интервалом 100 с относительно опорной точки GBAS, больших, чем соответствующие уровни защиты.
2. Ограничение погрешностей решения ЛККС навигационной задачи по определению местоположения на основе GAST D, при сглаживании с интервалом 100 с, обеспечит ограничение погрешностей решения навигационной задачи на основе GAST D, при сглаживании с интервалом 30 с.
Дополнительные требования к ограничениям для ЛККС, классифицированной как FAST D.
Значение ?vert (используемое при расчете уровня защиты VPLH0) и значение ?lat (используемое при расчете уровня защиты LPLH0) для GAST D на основе передаваемых параметров, за исключением вклада воздушного судна, удовлетворяют условию нормального распределения с нулевым средним, а стандартное отклонение, равное ?vert и ?lat, ограничивает распределение вертикальной и боковой погрешностей в составе суммарной погрешности дифференциальной поправки следующим образом:


где
 - функция плотности вероятности вертикальной или боковой дифференциальной погрешности определения местоположения, за исключением вклада воздушного судна, и
- функция плотности вероятности вертикальной или боковой дифференциальной погрешности определения местоположения, за исключением вклада воздушного судна, и
Значение ?vert,H1 (используемое при расчете уровня защиты VPLH1) и значение ?lat,H1 (используемое при расчете уровня защиты LPLH1) для GAST D на основе передаваемых параметров, за исключением вклада воздушного судна, ограничивают суммарные ошибки дифференциальных поправок, образуемые всеми возможными подмножествами с одним исключенным приемником.
Примечание: Суммарные ошибки дифференциальных поправок относятся к поправкам на основе кодовых измерений при сглаживании по несущей с использованием постоянной времени сглаживания 100 с.
Для ЛККС, классифицированной как FAST D, частота измерений с ошибками от любого одного и только одного опорного приемника должна составлять менее 1?10-5 в 150 с.
Примечание: Измерения с ошибками могут возникнуть вследствие ошибок в приемнике или окружающих условий, присущих только месту расположения отдельного опорного приемника.
Риск потери целостности уровня защиты ЛККС, которая обеспечивает определение местоположения, должен составлять менее 10-9 в час.
Для блоков данных FAS сообщения типа 4 с определителем характеристик захода на посадку, кодированным как 1, 2, 3 или 4, значение FASLAL для каждого блока FAS, как указано в поле бокового порога срабатывания сигнализации FAS в сообщении типа 4, не превышает 40 м, а значение FASVAL для каждого блока FAS, как указано в поле вертикального порога срабатывания сигнализации FAS в сообщении типа 4, не превышает 10 м.
Для блоков данных FAS сообщения типа 4 с определителем характеристик захода на посадку, кодированным как 0, значения FASLAL и FASVAL не превышают 40 м по боку, 50 м (APV-I) и 20 м (APV-II) по вертикали, для предполагаемого эксплуатационного применения.
Непрерывность обслуживания.
Непрерывность обслуживания, предоставляемого ЛККС, классифицированной как FAST A, B, C или D, должна составлять не менее 1 - 8,0?10-6 в течение любого 15-ти секундного интервала.
Примечание: Непрерывность обслуживания, предоставляемого ЛККС, представляет собой среднюю вероятность того, что в течение 15-секундного периода система ОВЧ-радиопередачи данных передает данные в рамках установленных допусков, напряженность поля ОВЧ-радиопередачи данных находится в пределах заданного диапазона и уровни защиты ниже порогов срабатывания сигнализации, включая изменения существующей конфигурации, обусловленные космическим сегментом.
Дополнительные требования к непрерывности обслуживания для FAST D. Вероятность отказа или ложной сигнализации ЛККС, классифицированной как FAST D, за исключением мониторинга дальномерных источников, которые приводят к внеплановому перерыву в обслуживании в течение периода времени не менее 1,5 с, не должна превышать 2,0?10-6 в течение любого 15-ти секундного интервала. Вероятность исключения ЛККС любого отдельного безотказного дальномерного источника из поправок сообщений типа 1 или 11 вследствие ложного обнаружения наземными средствами мониторинга целостности не должна превышать 2,0?10-7 в течение любого 15-ти секундного интервала.
Примечание:
1. Потеря обслуживания включает отказы, приводящие к потере ОВЧ-данных при передаче, невозможности обеспечивать требуемую напряженность поля ОВЧ-радиопередачи данных, а также отказы, приводящие к ОВЧ-радиопередаче данных вне допустимых значений и срабатывании сигнализации из-за нарушения целостности.
2. Непрерывность для FAST D определяется как вероятность продолжения обеспечения наземной подсистемой обслуживания, соответствующего предусмотренным функциям наземной подсистемы. Результирующая на борту непрерывность характеристик навигационной системы при определении области местоположения должна оцениваться в контексте определенной геометрии спутников и степени интеграции бортовых систем самолета. За оценку непрерывности навигационного обслуживания при определении области местоположения для GAST D ответственность несет пользователь на борту.
Непрерывность при определении местоположения должна составлять не менее 1 - 1?10-4 на час.
Эксплуатационная готовность.
Эксплуатационная готовность должна быть указана в эксплуатационной документации и составлять не менее 0,99.
ФУНКЦИОНАЛЬНЫЕ ТРЕБОВАНИЯ
Передача и частота сообщений.
Применительно к типам обслуживания ЛККС должна передавать сообщения типов, приведенных в таблице 8:
Таблица 8 - Типы сообщений ЛККС для обеспечиваемых видов обслуживания
| Тип сообщения |
GAST A: примечание 1 |
GAST B: примечание 1 |
GAST C: примечание 1 |
GAST D: примечание 1 |
|---|---|---|---|---|
| МТ 1 |
Факультативно. Примечание 2 |
Обязательно | Обязательно | Обязательно |
| МТ 2 | Обязательно | Обязательно | Обязательно | Обязательно |
| МТ2-ADB 1 |
Факультативно. Примечание 3 |
Факультативно. Примечание 3 |
Факультативно. Примечание 3 |
Обязательно |
| МТ2-ADB 2 |
Факультативно. Примечание 4 |
Факультативно. Примечание 4 |
Факультативно. Примечание 4 |
Факультативно |
| МТ2-ADB 3 | Не используется | Не используется | Не используется | Обязательно |
| МТ2-ADB 4 | Рекомендуется | Рекомендуется | Рекомендуется | Обязательно |
|
МТ3. Примечание 5 |
Рекомендуется | Рекомендуется | Рекомендуется | Обязательно |
| МТ 4 | Факультативно | Обязательно | Обязательно | Обязательно |
| МТ 5 | Факультативно | Факультативно | Факультативно | Факультативно |
| МТ11 | Не используется | Не используется | Не используется | Обязательно |
| МТ 101 |
Факультативно. Примечание 2 |
Запрещено | Запрещено | Запрещено |
Примечание:
1. Определения терминов:
Обязательно: сообщение должно передаваться при обеспечении данного вида обслуживания.
Факультативно: передача сообщения является необязательной при обеспечении данного вида обслуживания (не используется некоторыми или всеми бортовыми подсистемами).
Рекомендуется: использование сообщения является необязательным, но рекомендуется при обеспечении данного вида обслуживания.
Не используется: сообщение не используется бортовыми подсистемами, обеспечивающими данный вид обслуживания.
Запрещено: передача сообщения не разрешается при обеспечении данного вида обслуживания.
2. Наземные подсистемы, обеспечивающие виды обслуживания GAST A, могут передавать сообщения типа 1 или 101, но не оба типа сразу.
3. MT2-ADB1 является обязательным, если предоставляется обслуживание для определения местоположения.
4. MT2-ADB2 является обязательным, если предоставляется обслуживание GRAS.
5. MT3 рекомендуется (GAST A, B, C) или требуется (GAST D) использовать только для того, чтобы выполнить требования к заполнению временномго интервала, приведенные в п. 1.8.1.4.
ЛККС передает сообщения типа 2 с дополнительными блоками данных, необходимыми для обеспечения планируемых операций.
ЛККС, которая поддерживает виды (GAST) B, C или D обслуживания заходов на посадку с использованием ЛККС, передает блоки FAS в сообщениях типа 4 для этих заходов на посадку. В том случае, если ЛККС обеспечивает любой заход на посадку с использованием GAST A или B и не передает блоки FAS для соответствующих заходов на посадку, она передает дополнительный блок данных 1 в сообщениях типа 2.
Примечание:. Блоки FAS для процедур APV могут храниться в базе данных на борту воздушных судов. Передача дополнительного блока данных 1 позволяет бортовому приемнику выбирать ЛККС, которая обеспечивает процедуры захода на посадку, в бортовой базе данных. Блоки FAS могут также передаваться для обеспечения операций воздушных судов без использования бортовой базы данных.
Рекомендация. Сообщение типа 5 должно обеспечивать возможность передачи дополнительной информации, если стандартный угол маски 5о недостаточен для обеспечения видимости спутника в течение определенного захода на посадку антеннами ЛККС или антенной воздушного судна.
В каждой точке зоны действия должны обеспечиваться указанные в п. 1.6.1.1 сообщения, отвечающие требованиям по напряженности поля п.п. 1.2.3.10, 1.2.3.11, 1.2.3.12, 1.2.4.9 и требованиям по минимальной частоте, указанным в таблице 9:
Таблица 9 - Частота радиопередачи данных ЛККС
| Тип сообщения | Минимальная частота радиопередачи | Максимальная частота радиопередачи |
|---|---|---|
| 1 или 101 | Для каждого типа измерений: все блоки измерений один раз за кадр (2 Гц, см. примечание) | Для каждого типа измерений: все блоки измерений один раз на временномй интервал |
| 2 | Одно на 20 последовательных кадров (0,1 Гц) | Одно на кадр |
| 3 | Частота зависит от длины сообщения и запланированности других сообщений (см. п. 1.8.1.4) | Одно на временномй интервал (слот) и восемь на кадр |
| 4 | Все блоки FAS: один раз за 20 последовательных кадров (0,1 Гц) | Все блоки FAS: один раз в кадр |
| 5 | Все задействованные источники: один раз за 20 последовательных кадров (0,1 Гц) | Все задействованные источники: один раз за 5 последовательных кадров |
| 11 | Для каждого типа измерений: все блоки измерений один раз за кадр (2 Гц, см. примечание) | Для каждого типа измерений: все блоки измерений один раз на временномй интервал |
Идентификатор блока сообщения.
Идентификатор MBI должен устанавливаться либо в нормальное, либо в тестовое положение в соответствии с приведенным в п. 1.3.3.2 правилом кодирования.
Аутентификация VDB
Рекомендация. ЛККС следует поддерживать аутентификацию VDB (см. п. 1.8).
ЛККС, классифицированные как FAST D, поддерживают аутентификацию VDB (см. п. 1.8).
Поправки к псевдодальности
Время между моментом, указанным модифицированным Z-отсчетом, и последним битом передаваемого сообщения типа 1, типа 11 или типа 101 не должно превышать 0,5 с.
Исключая момент смены набора эфемерид, первый источник дальномерных сигналов в сообщении типа 1, типа 11 или типа 101 должен упорядочиваться таким образом, что параметр декорреляции эфемерид, CRC эфемерид и продолжительность эксплуатационной готовности каждого источника дальномерных сигналов основных орбитальных систем должна передаваться не менее одного раза каждые 10 с.
В ходе смены набора эфемерид, первый источник дальномерных сигналов в сообщении типа 1, типа 11 или типа 101 должен упорядочиваться таким образом, что параметр декорреляции эфемерид, CRC эфемерид и продолжительность эксплуатационной готовности каждого дальномерного источника основной орбитальной системы передаются не менее одного раза каждые 27 с. При получении новых эфемеридных данных от источника дальномерных сигналов основной орбитальной системы (систем) ЛККС должна использовать предшествующие эфемеридные данные от каждого спутника до момента получения новых эфемеридных данных в течение 2 мин., но осуществлять переход к новым эфемеридным данным не позже, чем по истечении 3 мин.
После осуществления перехода к использованию новых эфемеридных данных для данного источника дальномерных сигналов ЛККС должна передавать новый CRC эфемерид для всех расположений данного дальномерного источника в информации с низкой частотой обновления сообщения типа 1, типа 11 или типа 101 в любых трех последовательных кадрах. Для конкретного источника дальномерных сигналов ЛККС должна продолжать передавать данные, соответствующие предшествующим эфемеридным данным, до тех пор, пока в информации с низкой частотой обновления сообщения типа 1, типа 11 или типа 101 не будет передан новый CRC эфемерид. Если CRC эфемерид изменяется, а признак IOD не изменяется, то источник дальномерных сигналов должен рассматриваться наземной подсистемой как непригодный.
Примечание к п.п. 1.6.4.3 и 1.6.4.4. При смене эфемерид в течение 2 минут ЛККС должна использовать старые эфемериды, чтобы гарантировать получение новых эфемеридных данных бортовым приемником. Далее должна инициироваться следующая процедура:
1. Для дальномерного источника, блок данных которого стоит первым в сообщении типа 1, типа 11 или типа 101 происходит переход на новые эфемериды. При этом меняется значение CRC эфемерид, передаваемое в разделе с низкочастотной информацией сообщения типа 1, типа 11 или типа 101.
2. Чтобы гарантировать прием нового CRC эфемерид бортовым приемником, циклическая смена блоков данных приостанавливается - сообщение типа 1, типа 11 или типа 101 с новым CRC передается в трех последовательных кадрах.
3. Блоки данных дальномерных источников циклически сдвигаются. При необходимости смены эфемерид повторяются вышеуказанные п.п. 1 и 2.
Рекомендация. Параметр декорреляции эфемерид и CRC эфемерид для каждого спутника основной орбитальной системы должны передаваться как можно чаще.
Каждая поправка, передаваемая к псевдодальности ЛККС, должна определяться комбинацией оценок поправок к псевдодальности для соответствующего источника дальномерных сигналов, вычисленных от каждого опорного приемника на основе одних эфемеридных данных. Поправки должны базироваться на кодовых измерениях псевдодальности для каждого спутника, сглаженных с использованием измерений по несущей с использованием сглаживающего фильтра.
ЛККС должны обеспечиваться такие ?pr_gnd и параметры В для каждой поправки к псевдодальности в сообщении типа 1, чтобы удовлетворялись требования к риску потери целостности уровня защиты, приведенные в п. 1.5.2.1.8 для GAST A, B и C. Для каждой поправки псевдодальности предоставляются, по крайней мере, два значения В, которые не используют специальное кодирование. ЛККС должна обеспечивать ?pr_gnd и, при необходимости, параметры В для каждой поправки к псевдодальности в сообщении типа 101, чтобы удовлетворялись требования к риску потери целостности уровня защиты, приведенные в п. 1.5.2.1.8.
Примечание: Передача параметров В является необязательной для сообщений типа 101.
ЛККС, классифицированная как FAST D, обеспечивает такие Sigma_PR_gnd_D в сообщении типа 11 и параметры B для каждой поправки к псевдодальности в сообщении типа 1, чтобы удовлетворялись требования к риску потери целостности уровня защиты, приведенные в п. 1.5.2.1.8.
Для ЛККС FAST D, передающей сообщение типа 11, если параметр ?pr_gnd кодируется как недействительный в сообщении типа 1, то параметр Sigma_PR_gnd_D для соответствующего спутника в сообщении типа 11 также кодируется как недействительный.
Рекомендация. В ЛККС должны контролироваться измерения опорных приемников при вычислениях поправок к псевдодальности. Не допускается использование измерений, содержащих ошибки или отказавшие опорные приемники.
Поле IOD в каждом блоке измерений источника дальномерных сигналов должно устанавливаться в значение IOD, полученное от источника дальномерных сигналов, который соответствует эфемеридным данным, использовавшимся для вычисления поправки к псевдодальности.
Поле IOD должно соответствовать значению IODE текущих эфемерид для GPS и значению tb текущих эфемерид для ГЛОНАСС.
При расчете поправок к псевдодальностям не должны применяться ионосферные и тропосферные коррекции.
Если передается связанная пара сообщений типа 1, типа 11 или типа 101,то:
a) оба сообщения должны иметь один и тот же модифицированный Z-отсчет;
б) минимальное количество поправок к псевдодальности в каждом сообщении должно быть равно одной;
в) блок измерений для данного спутника должен передаваться не более чем один раз в связанной паре сообщений;
г) два сообщения должны передаваться в разных временных интервалах;
д) порядок значений B в двух сообщениях остается неизменным;
е) для конкретного типа измерения количество измерений и данные с низкой частотой обновления должны вычисляться отдельно для каждого из двух отдельных сообщений;
ж) в случае использования FAST D, когда передается связанная пара сообщений типа 1, также должна существовать и связанная пара сообщений типа 11;
з) если используются связанные сообщения типа 1 или типа 11, спутники должны подразделяться на такие же наборы и порядок как в сообщении типа 1, так и в сообщении типа 11.
Примечание: Сообщения типа 1 могут включать дополнительные спутники, не указанные в сообщениях типа 11, но относительный порядок этих спутников, доступных в обоих сообщениях, должен быть один и тот же в сообщении типа 1 и типа 11. Бортовая обработка невозможна для спутников, включенных в сообщение типа 11, но не включенных в сообщение типа 1.
Рекомендация. Связанные сообщения следует использовать только тогда, когда для передачи доступно большее число поправок к псевдодальностям, чем предусмотрено в сообщении типа 1.
Модифицированный Z-отсчет для сообщений типа 1, типа 11 или типа 101 для данного типа измерений должен обновляться в каждом кадре.
Если передается сообщение типа 11, соответствующие сообщения типа 1 и типа 11 имеют один модифицированный Z-отсчет.
ЛККС должна передавать параметр декорреляции эфемерид для каждого источника дальномерных сигналов таким образом, чтобы удовлетворялось требование к риску потери целостности сигнала в пространстве ЛККС, указанные:
а) в п. 1.5.2.1.1 для захода на посадку при использовании ЛККС, классифицированной как FAST A, B или С;
б) в п. 1.5.2.1.2 для захода на посадку при использовании ЛККС, классифицированной как FAST D;
в) в п. 1.5.2.1.6 для определения местоположения.
Данные, относящиеся к ЛККС.
ЛККС должна передавать значения коэффициента рефракции, приведенной высоты и погрешности рефракции с целью удовлетворения требований, указанных в п.п. 1.5.2.1.8, 1.5.2.1.11 к риску потери целостности уровня защиты.
При удовлетворении ЛККС, классифицированной как FAST A, B или С, требованиям п.п. 1.5.2.1.1, 1.5.2.1.8, 1.5.3.1, 1.7.2 и 1.7.3.1, но не всем требованиям п.п. 1.5.2.1.2, 1.5.2.1.3, 1.5.2.1.8 и 1.5.3.2, то значение GCID должно устанавливаться в 1, в противном случае - в 7.
Примечание: Некоторые из требований, применимых к FAST D, дублируют требования к FAST A, B и C. Слова "но не всем" относятся к состоянию, когда наземная подсистема может отвечать некоторым из требований, применимых к FAST D, но не всем из них. В таком случае GCID устанавливается на 1, указывающую на то, что наземная подсистема отвечает только критериям FAST A, B или C.
Если ЛККС, классифицированная как FAST D, удовлетворяет требованиям п.п. 1.5.2.1.1, 1.5.2.1.2, 1.5.2.1.3, 1.5.2.1.8, 1.5.3.1, 1.5.3.2, 1.7.2 и 1.7.3, то значение GCID должно устанавливаться в 2, в противном случае оно будет устанавливаться в соответствии с п. 1.6.5.2.
Погрешность фазового центра каждого антенного устройства опорного приемника должна быть не более 8 см относительно опорной точки ЛККС.
Точность геодезической привязки опорной точки ЛККС относительно систем координат ПЗ-90.11 должна быть меньше чем 0,25 м по вертикали и 1 м по горизонтали.
ЛККС, классифицированная как FAST A, B, С или D, должна передавать параметр градиента запаздывания ионосферы в сообщении типа 2 с целью удовлетворения требований к риску потери целостности уровня защиты, приведенных в п.п. 1.5.2.1.8, 1.5.2.1.11.
ЛККС, классифицированная как FAST D, должна передавать параметр градиента запаздывания ионосферы в дополнительном блоке данных 3 сообщения типа 2 с целью удовлетворения требований к риску потери целостности уровня защиты, приведенных в п. 1.5.2.1.8.
ЛККС должна передавать параметры предельных погрешностей местоположения в эфемеридах, используя дополнительный блок данных 1 в сообщении типа 2.
ЛККС должна предоставлять информацию о расстоянии (Dmax) от её опорной точки.
Если ЛККС не удовлетворяет требованиям п.п. 1.5.2.1.6 и 1.5.2.1.11 она должна указывать, используя параметр RSDS, что определение местоположения не обеспечивается.
Данные конечного этапа захода на посадку.
Рекомендация. Должна обеспечиваться возможность установки FASVAL и FASLAL для любого блока данных FAS в "1111 1111" соответственно использованию только бокового канала или индикации того, что заход на посадку не должен производиться.
Регистрация.
ЛККС должна обеспечивать регистрацию с привязкой к шкале времени UTC следующих параметров всех спутников ГЛОНАСС и GPS, находящихся в пределах видимости станции:
а) номера спутников созвездия;
б) текущие значения времени UTC созвездия;
в) передаваемые спутниками навигационные сообщения по всем спутникам по мере их обновления.
г) текущие значения отношения «плотность сигнала несущей - плотность шума» для сигнала спутника (C/N0);
д) текущие необработанные измерения псевдослучайного кода и фазы несущей.
ЛККС должна обеспечивать регистрацию следующей информации:
а) передаваемых по радиоканалу сообщений;
б) уровня мощности передачи данных;
в) информации о состоянии приемников;
г) информации о состоянии передатчиков.
Запись зарегистрированной информации на внешний носитель должно обеспечиваться силами эксплуатирующего персонала.
ЛККС должна обеспечивать непрерывную регистрацию информации в течение не менее 30 суток.
Помехоустойчивость
В условиях воздействия гармонических, шумоподобных и импульсных помех погрешность слежения за дальностью в приемниках ЛККС не должна превышать (1?) 0,8 м для ГЛОНАСС и 0,4 м для GPS.
МОНИТОРИНГ
Радиочастотный мониторинг.
ЛККС должна осуществлять мониторинг радиопередачи данных. Передача данных прекращается в течение 0.5 с в случае непрерывного расхождения в течение любого 3-секундного периода между передаваемыми прикладными данными и прикладными данными, полученными или сохраненными в системе контроля до передачи. Для ЛККС, классифицированных как FAST D, передача данных прекращается в течение 0,5 с в случае непрерывного расхождения в течение любого 1-секундного периода между передаваемыми прикладными данными и прикладными данными, полученными или сохраненными в системе контроля до передачи.
Примечание: Для ЛККС, обеспечивающих аутентификацию, прекращение передачи данных означает прекращение передачи сообщений типа 1 и сообщений типа 11, если применимо, либо прекращение передачи сообщений типа 101. В соответствии с п. 1.8.1.4 наземная подсистема все еще должна передавать сообщения таким образом, чтобы в процентном отношении была заполнена заданная или превышающая ее часть каждого назначенного временного интервала. Это можно сделать путем передачи сообщений типа 2, типа 3, типа 4 и/или типа 5.
Риск того, что наземная подсистема передает сигнал в неразрешенном временном интервале и не сможет в течение 1 с выявить передачу, выходящую за пределы установленного временного интервала должен быть менее 1 ? 10-7 за любой 30 секундный период. При обнаружении передач за пределами установленного временного интервала, ЛККС должна прекращать все радиопередачи данных в течение не более 0.5 с.
Вероятность того, что уровень передаваемой мощности ОВЧ увеличится более чем на 3 дБ относительно номинального уровня мощности в течение более 1 с должен быть менее 2,0 ? 10-7 за любой 30-секундный период.
Мониторинг данных.
Осуществляемый контроль качества радиопередач должен быть согласован с требованиями к задержке срабатывания сигнализации, приведенными в п.п. 1.5.2.1.4, 1.5.2.1.5 или 1.5.2.1.7. Действие мониторинга должно состоять в осуществлении одного из следующих вариантов:
а) передача сообщения типа 1 (и типа 11, если передается) или типа 101 с нулевыми блоками измерений;
б) передача сообщения типа 1 (и типа 11, если передается) или типа 101 с полем ?pr_gnd,i (и ?pr_gnd_D,i, если передается), указывающим, какой из источников дальномерных сигналов, включенных в ранее переданный кадр, является непригодным;
в) завершение радиопередачи данных.
Мониторинг целостности для источников дальномерных сигналов ГНСС.
ЛККС должна контролировать сигналы спутников для выявления условий, которые могут привести к неправильному функционированию дифференциальной обработки для бортовых приемников, в которых введены ограничения слежения. Время срабатывания сигнализации контроля должно соответствовать указанному в п.п. 1.5.2.1.4, 1.5.2.1.5 или 1.5.2.1.7. Действие контроля должно заключаться в установлении ?pr_gnd в битовое состояние «1111 1111» для данного спутника или исключении данного спутника из сообщения типа 1, типа 11 или типа 101.
ЛККС должна использовать наибольший корреляционный пик во всех приемниках, применяемых для генерирования поправок псевдодальности. ЛККС также должна обнаруживать условия, которые вызывают более чем одно пересечение нуля для бортовых приемников, использующих функцию дискриминатора «опережение - запаздывание».
Для ЛККС, классифицированной как FAST D, вероятность того, что ошибка |Er| в точке посадочного порога ВПП (LTP) любой ВПП, для которой ЛККС обеспечивает GAST D, для скорректированной псевдодальности, сглаженной с интервалом 30 с, вызванная неисправностью дальномерного источника, не обнаруживается и не отображается в передаваемом сообщении типа 11, попадает в область, определенную в таблице 10. Неисправностями дальномерных источников, к которым применяется данное требование, являются:
a) искажение сигнала;
б) расхождение кода/несущей;
в) чрезмерное ускорение изменения псевдодальности, например, скачок или другое быстрое изменение;
г) ошибочная передача данных эфемерид от спутника.
Таблица 10 - Параметры Pmd_limit
| Вероятность необнаружения | Погрешность псевдодальности, м |
|---|---|
| Pmd_limit ? 1 | 0 ? |Er| < 0,75 |
| Pmd_limit ? 10(-2,56х|Er| + 1,92) | 0,75 ? |Er| < 2,7 |
| Pmd_limit ? 10-5 | 2,7 ? |Er| < ? |
Примечание:
1. После обнаружения неисправность дальномерного источника может быть отражена в сообщении типа 11 следующим образом:
a) удаление поправки для соответствующего спутника из сообщения типа 11; или
б) маркирование спутника как неработоспособного с использованием кодирования ?pr_gnd_D;.
2. Приемлемая вероятность необнаружения определяется в отношении погрешности дифференциально скорректированной псевдодальности. Погрешность дифференциально скорректированной псевдодальности, |Er|, включает погрешность вследствие неисправности отдельного дальномерного источника при условии правильного применения передаваемых поправок сообщения типа 11 ЛККС (т.е. поправка к пседодальности и поправки к скорости изменения дальности) бортовым оборудованием. Оценка характеристики Pmd включает шум в исправном состоянии ЛККС. Увеличение |Er| с течением времени должно учитывать задержку данных ЛККС, но не задержку бортового оборудования.
Для ЛККС, классифицированной как FAST D, вероятность того, что ошибка |Er| в точке посадочного порога ВПП (LTP) любой ВПП, для которой ЛККС обеспечивает GAST D, |Er|, больше 1,6 м в скорректированной псевдодальности, сглаженной с интервалом 30 с, вызванная неисправностью дальномерного источника, не обнаруживается и отображается в передаваемом сообщении типа 11 в течение 1,5 с, составляет менее 1х10-9 на одну любую посадку при умножении на априорную вероятность (Papriori). Неисправностями дальномерных источников, к которым применяется данное требование, являются:
a) искажение сигнала;
б) расхождение кода/несущей;
в) чрезмерное ускорение изменения псевдодальности, например, скачок или другое быстрое изменение;
г) ошибочная передача данных эфемерид от спутника.
Примечание:
1. Предполагается, что априорная вероятность каждой неисправности дальномерного источника (Papriori) является значением, используемым в анализе для демонстрации соответствия требованиям к предельным погрешностям для FAST C и D.
2. После обнаружения неисправность дальномерного источника может быть отражена в сообщении типа 11 следующим образом:
a) удаление поправки для соответствующего спутника из сообщения типа 11; или
б) маркирование спутника как неработоспособного с использованием кодирования ?pr_gnd_D.
Для ЛККС FAST D вероятность ошибки (|Er|) в скорректированной псевдодальности, сглаженной с интервалом 30 с, в точке посадочного порога ВПП (LTP) для каждой ВПП, обслуживаемой GAST D, которая:
a) вызвана градиентом ионосферной задержки в пространстве,
б) больше значения EIG, рассчитанного по данным сообщения типа 2, и
в) не обнаружена и отображается в передаваемом сообщении типа 11 в течение 1,5 с, составляет менее 1?10-9 на одну любую посадку. Наземная подсистема FAST D ограничивает передаваемые в сообщении типа 2 параметры для обеспечения того, что максимальное значение EIG в каждой LTP операций GAST D не превышает 2,75 м.
Примечание: Общая вероятность необнаруженного градиента задержки включает априорную вероятность градиента и вероятность необнаружения средством(ами) мониторинга.
ФУНКЦИОНАЛЬНЫЕ ТРЕБОВАНИЯ К ПРОТОКОЛАМ АУТЕНТИФИКАЦИИ
Функциональные требования к ЛККС, обеспечивающим аутентификацию.
ЛККС должна передавать дополнительный блок данных 4 с сообщением типа 2 с полем определения группы интервалов, закодированных для указания выделенного для наземной станции интервала.
ЛККС передает каждое сообщение типа 2 только в одном из группы временных интервалов, определяемых как интервалы, предусмотренные для МТ 2. Первый интервал в группе интервалов, предусмотренных для МТ 2, соответствует кодированию SSID для наземной подсистемы. Интервал A представлен посредством SSID = 0, B - 1, C - 2 и H - 7. Группа интервалов, предусмотренных для МТ 2, включает также временной интервал, следующий за интервалом, соответствующим станции SSID, если он существует в кадре. Если до окончания кадра дополнительный интервал отсутствует, в данную группу включается только SSID.
Примечание: Например, группа интервалов, предусмотренных для МТ 2, в случае SSID = 0 будет включать интервалы {A, B}, а группа интервалов, предусмотренных для МТ 2, в случае SSID = 6 будет включать интервалы {G, H}. Группа интервалов, предусмотренных для МТ 2, в случае SSID = 7 включает только интервал {H}.
Группа временнымх интервалов, выделенных наземной станции, включает, как минимум, все интервалы в группе интервалов, предусмотренных для МТ 2, как указано в п. 1.8.1.2.
ЛККС должна передавать сообщение таким образом, чтобы заполнялось 89% или больше каждого выделенного интервала. При необходимости для заполнения неиспользованного пространства в любом выделенном временномм интервале могут использоваться сообщения типа 3.
Примечание: Требование относится к совокупным передачам от всех передатчиков ЛККС. Вследствие блокирования сигнала не все эти передачи могут приниматься в объеме обслуживания.
Каждый идентификатор опорной траектории, включенный в блок данных конечного этапа захода на посадку, передаваемый ЛККС с помощью сообщений типа 4, должен обозначаться первой буквой, выбранной для указания SSID ЛККС в соответствии со следующим правилом кодирования:
A = SSID 0,
X = SSID 1,
Z = SSID 2,
J = SSID 3,
C = SSID 4,
V = SSID 5,
P = SSID 6,
T = SSID 7.
Функциональные требования к наземным подсистемам, не обеспечивающим функции аутентификации
Буквы набора {A X Z J C V P T} не используются в качестве первой буквы идентификатора опорной траектории, включенного в любой блок FAS, передаваемой наземной подсистемой путем рассылки сообщений типа 4.
ОТОБРАЖЕНИЕ РЕЗУЛЬТАТОВ КОНТРОЛЯ И СОСТОЯНИЯ ЛККС
В ЛККС должен обеспечиваться непрерывный контроль всех элементов, отказ которых приводит к отказу элементов более высокого уровня (без учета резервирования) с глубиной не ниже типового элемента замены.
Примечание: Перечень типовых элементов замены должен быть приведен в эксплуатационной документации.
В ЛККС должно обеспечиваться автоматическое переключение с отказавших зарезервированных (задублированных) функциональных элементов на резервные, а также ручное переключение на резервные средства.
В ЛККС должно обеспечиваться документирование и воспроизведение в системном журнале сообщений информации функционального контроля состояния технических средств и программного обеспечения с привязкой ко времени, имени функционального элемента.
ЛККС должна обеспечивать формирование, передачу в течение 3 с потребителям и регистрацию признаков своей неработоспособности.
В ЛККС должна быть реализована индикация состояния навигационного обслуживания GNSS в зоне обслуживания ЛККС:
а) заход на посадку по I, II или III категории;
б) заход на посадку с управлением по вертикали (APV-II);
в) заход на посадку с управлением по вертикали (APV-I);
г) заход на посадку с использованием только бокового канала (при выполнении требований п. 1.6.6.1).
д) определение местоположения.
ПРИЛОЖЕНИЕ № 16
к Правилам (п. 26)
Требования к наземной станции регистрации данных ГНСС
1. Состав станции регистрации включает:
навигационный приемник GPS/ГЛОНАСС (резервированный) с антенной (антеннами);
аппаратуру записи параметров сигналов навигационных спутников основных созвездий систем ГНСС (ГЛОНАСС и GPS);
дистанционный пульт управления (выносной терминал);
выносной блок индикации;
источник бесперебойного питания.
2. Тактико-технические требования
2.1. Станция регистрации должна обеспечивать:
ручное (местное) включение и выключение оборудования;
дистанционное (с использованием выносного терминала) включение и выключение оборудования;
передачу информации о техническом состоянии оборудования на выносной терминал;
переключение (автоматический переход, дистанционное через выносной терминал и ручное переключение) с неисправного комплекта аппаратуры записи на исправный.
2.2. Рекомендация. Дистанционный контроль работы и управление станцией регистрации должны обеспечиваться по протоколу SNMP.
2.3. Аппаратура записи и навигационный приемник должны обеспечивать работу в режиме «нагруженный резерв».
2.4. В состав станции регистрации должен входить источник бесперебойного электроснабжения, обеспечивающий непрерывность работы станции при перерывах внешнего электроснабжения продолжительностью до 20 минут.
2.5. Время включения станции регистрации должно составлять не более 3 минут с момента подачи команды на включение.
2.6. На станцию регистрации должны быть установлены и приведены в эксплуатационной документации показатели срока службы и ресурса, среднего времени наработки на отказ, среднего времени восстановления. Эти показатели должны быть:
назначенный срок службы - не менее 10 лет;
назначенный ресурс - не менее 120 000 часов;
средняя наработка на отказ - не менее 20 000 часов;
среднее время восстановления - не более 20 минут.
2.7. Оборудование станции регистрации должно обеспечивать непрерывную круглосуточную работу.
2.8. Станция регистрации должна обеспечивать регистрацию с привязкой к шкале времени UTC следующих параметров всех спутников ГЛОНАСС и GPS, находящихся в пределах видимости станции:
номера спутников созвездия;
текущие значения времени UTC созвездия;
текущие значения отношения «плотность сигнала несущей - плотность шума» для сигнала спутника (C/N0);
текущие необработанные измерения псевдослучайного кода и фазы несущей;
навигационные сообщения спутников;
координаты станции регистрации, рассчитанные по навигационным сигналам каждого созвездия (ГЛОНАСС, GPS, ГЛОНАСС+GPS);
текущие отклонения между значениями местоположений, рассчитываемых станцией регистрации по навигационным сигналам спутников каждого созвездия (ГЛОНАСС, GPS, ГЛОНАСС+GPS) и ее фактическим местонахождением.
2.9. Станция регистрации должна обеспечивать регистрацию с привязкой к шкале времени UTC информации о техническом состоянии станции и используемого приемника сигналов ГНСС.
2.10. Станция регистрации должна обеспечить отображение информации о регистрируемых параметрах и техническом состоянии непосредственно на станции или на дистанционном пункте управления (выносном терминале).
2.11. Станция регистрации должна обеспечивать запись и хранение информации не менее 30 суток.
2.12. Станция регистрации должна обеспечивать автоматическое удаление записанной информации с истекшим сроком хранения, за исключением файлов с записанной информацией за интервалы времени, для которых установлен признак постоянного хранения (запрета автоматического стирания).
2.13. Станция регистрации должна обеспечивать возможность выгрузки записанной информации за заданный интервал времени на внешний USB носитель в виде файлов стандартных табличных форматов (*.xls, *.xlsx, *.csv).
2.14. Станция регистрации должна обеспечивать возможность выгрузки записанных данных без прекращения процесса регистрации параметров ГНСС.
2.15. Станция регистрации должна обеспечивать:
определение возможности/запрета совершения типовых операций ВС по сигналам ГНСС (ГЛОНАСС, GPS, ГЛОНАСС+GPS);
Примечание: Под типовыми операциями понимается полет ВС на маршруте, полет ВС в зоне аэродрома (SID, STAR) , неточный заход на посадку.
определение величины отклонения между местоположением станции регистрации, определяемым входящим в ее комплект навигационным приемником, и фактическим местонахождением станции (координатами геодезической привязки) (далее - текущее отклонение);
отображение на выносном блоке индикации сигнализации возможности/запрета совершения типовых операций ВС по сигналам ГНСС (ГЛОНАСС, GPS, ГЛОНАСС+GPS);
регистрацию (запись) информации о возможности/запрете совершения типовых операций ВС по сигналам ГНСС (ГЛОНАСС, GPS, ГЛОНАСС+GPS) и величины текущего отклонения;
передачу информации о возможности/запрете совершения типовых операций ВС по сигналам ГНСС (ГЛОНАСС, GPS, ГЛОНАСС+GPS) внешним потребителям (например, КСА УВД) по согласованному протоколу;
передачу зарегистрированных данных внешнему потребителю (например, Центр мониторинга КАС СИДИМ) по согласованному протоколу.
ПРИЛОЖЕНИЕ № 17
к Правилам (п. 28)
Требования к наземным средствам авиационной электросвязи диапазона очень высоких частот
1. К наземным средствам авиационной электросвязи ОВЧ диапазона относятся:
а) радиоприемники;
б) радиопередатчики;
в) радиостанции;
г) автоматизированные приемо-передающие центры;
д) ретрансляторы.
2. Тактико-технические требования
2.1 Средства подвижной электросвязи должны обеспечивать радиосвязь между органами ОВД и экипажами ВС в классах излучения:
A3E - амплитудная модуляция с двумя боковыми полосами (DSB-AM);
A2D (ACARS) - манипуляция поднесущей с минимальным сдвигом (AM-MSK) со скоростью до 2400 бит/с;
G1D (ACARS поверх канала VDL режима 2, VDL режима 2) - 8-позиционная фазовая манипуляция с дифференциальным кодированием (D8PSK) со скоростью 10 500 символов в секунду (31 500 бит/с).
2.2 Средства подвижной электросвязи должны обеспечивать работу в диапазоне частот от 117,975 до 137 МГц.
2.3 Шаг сетки частот передающих и приемных устройств средств подвижной электросвязи должен быть:
25 и 8,33 кГц для класса излучения A3E;
25 кГц - для классов излучения A2D и G1D.
2.4 Время переключения приемо-передающего устройства с «передачи» на «прием» и обратно в телефонном режиме не должно превышать 50 мс.
2.5 Номинальная выходная мощность передатчика радиостанции или радиопередатчика для обслуживания ВС в районе аэродрома должна быть:
в районах ЕС ОрВД не менее 50 Вт;
в районах аэродромов не менее 5 Вт.
Допускается ступенчатая регулировка выходной мощности приемопередатчика.
Примечания:
1 При питании приемопередатчика от сети постоянного тока и снижении напряжения постоянного тока до 21,6 В допускается снижение выходной мощности не более чем на 3 дБ.
2 При работе на нагрузку с КСВН 2,0 допускается изменение значения падающей мощности не более чем на +/- 3 дБ относительно мощности при работе на нагрузку 50 Ом с КСВН не более 1,2.
2.6 Глубина модуляции должна быть настраиваемой в пределах от 30% до 90% при ограничении на 95%, при входном уровне модулирующего сигнала от 0,2 до 1,5 В.
2.7 Относительная нестабильность несущей частоты передающего устройства не должна превышать +/- 1·10-6.
2.8 Максимальное отклонение внешних несущих от присвоенной несущей частоты не более +/- 8 кГц.
Системы со смещенной несущей, предназначенные для работы с разносом каналов 8,33 кГц, ограничиваются системами с двумя несущими, использующими смещение несущей на +/- 2,5 кГц.
2.9 В системе с двумя несущими несущие должны быть разнесены на +/- 5 кГц. Стабильность частоты +/- 2 кГц.
2.10 В системе с тремя несущими несущие должны иметь нулевой разнос и разнос +/- 7,3 кГц. Стабильность частоты +/- 0,65 кГц.
2.11 В системе с четырьмя несущими несущие должны быть разнесены на +/- 2,5 кГц и +/- 7,5 кГц. Стабильность частоты +/- 0,5 кГц.
2.12 В системе с пятью несущими несущие должны иметь нулевой разнос, а также разнос +/- 4 кГц и +/- 8 кГц. Стабильность частоты +/- 40 Гц.
2.13 Уровень интермодуляционных излучений передатчиков, образующихся в диапазоне частот от 0,15 до 940 МГц, должен быть ослаблен не менее чем на 40 дБ по отношению к уровню излучения на основной частоте при отстройке на 100 кГц и более.
2.14 Побочные излучения передатчика
Допустимые уровни побочных излучений (ПИ) передатчика и условия их измерений приведены в? таблицах 1 - 3.
Таблица 1
Разнос частот (отстройка  Fi ) между центральной частотой основного излучения fс и нижней границейFн измерений в области побочных излучений
Fi ) между центральной частотой основного излучения fс и нижней границейFн измерений в области побочных излучений
| Полоса рабочих частот | Узкополосные передачи |
Отстройка  Fi для промежуточных значений Bн
Fi для промежуточных значений Bн
|
Широкополосные передачи | ||
|---|---|---|---|---|---|
| ДляBн < |
Отстройка  Fi
Fi
|
ДляBн > |
Отстройка  Fi
Fi
|
||
| 30 МГц < fс <= 1 ГГц | 25 кГц | 62,5 кГц | 2,5Bн | 10 МГц | 1,5Bн + 10 МГц |
Таблица 2
Верхняя граница Fв диапазона частот контроля побочных излучений
| Частотный диапазон радиопередатчика | Границы диапазонов измерений побочных излучений | |
|---|---|---|
| Ниже области внеполосных излучений (Fв) | Выше области внеполосных излучений (Fв) | |
| 100 МГц - 300 МГц | 9 кГц | 10-я гармоника |
Таблица 3
Допустимые уровни побочных излучений радиопередающих устройств
| Минимально допустимое ослабление ПИ Aпи(дБ) относительно уровня мощности на выходе радиопередатчика (применяются менее жесткие требования) | Максимально допустимая мощность в области побочных излучений Pi (дБм) при соответствующих ширине полосы и мощности P (Pпик) | Примечание |
|---|---|---|
| на частотах выше 30 МГц | ||
| Aпи= 43 + P, гдеP - мощность, дБВт, илиAпи = 70 | ПриP <= 500 Вт Pi = -13; приP > 500 Вт Pi = (P - 40), гдеP - мощность, дБВт | , |
| Примечания 1 Применяется одно из указанных выше требований к Aпи в зависимости от того, какой уровень ПИ соответствует менее жестким требованиям. Обязательными являются менее жесткие требования, выполнение более жестких требований - желательно. 2 Кроме случаев, когда нужны измерения Pпик, нормы излучения в области ПИ установлены в терминах средней мощности на выходе радиопередатчика (мощности, излучаемой антенной радиопередатчика). Для импульсных радиопередатчиков измеренная мощность побочного колебания пересчитывается в среднюю. | ||
Обозначения:
AПИ- ослабление ПИ относительно уровня мощности на выходе радиопередатчика, дБ;
Bн- необходимая ширина полосы частот, Гц (кГц, МГц, ГГц);
Bк- контрольная ширина полосы частот, Гц (кГц, МГц, ГГц) (ширина полосы частот, за нижним и верхним пределами которой любая спектральная составляющая имеет ослабление на 30 дБ и более относительно уровня излучения, приравненного к 0 дБ);
fс- рабочая частота радиопередатчика, Гц (кГц, МГц, ГГц);
Fн,Fв - нижняя и верхняя границы диапазона частот контроля побочных излучений, Гц (кГц, МГц, ГГц);
 Fi - разнос частот (отстройка) между центральной частотой основного излучения fси нижней (верхней) границей Fн (Fв) измерений в области побочных излучений, Гц (кГц, МГц, ГГц);
Fi - разнос частот (отстройка) между центральной частотой основного излучения fси нижней (верхней) границей Fн (Fв) измерений в области побочных излучений, Гц (кГц, МГц, ГГц);
P- средняя мощность на выходе радиопередающего устройства, Вт (дБВт). (В случае применения пакетной передачи средняя мощность Pи средняя мощность любых побочных излучений измеряются путем усреднения мощности за время длительности пакета);
Pпик- мощность на выходе радиопередающего устройства, усредненная за время одного радиочастотного периода, соответствующая максимуму огибающей модуляции при нормальных условиях работы, Вт (дБВт);
Pi- максимально допустимая мощность в области побочных излучений при соответствующей ширине полосы и мощности P Вт (дБВт).
Примечание - Индекс "0" относится к рабочей частоте, индекс "i" - к частотеi-го ПИ. В? таблице 3? приведены также требования к допустимым уровням ПИ в виде максимально допустимой мощности (Pi) любых составляющих ПИ, поступающих от радиопередатчика на антенну или составляющих ПИ, излучаемых радиопередатчиком, которые эквивалентны требованиям Aпи.
2.15 Ширина полосы линейного тракта передающего устройства в телефонном режиме при неравномерности АЧХ не более 6 дБ должна быть не менее чем от 300 до 2700 Гц при шаге сетки частот 25 кГц и не менее чем от 350 до 2500 Гц при шаге сетки частот 8,33 кГц.
2.16 Короткое замыкание и обрыв антенны на выходе передатчика, а также изменение коэффициента стоячей волны в подключенном антенном фидере более 2 не должны вызывать повреждения передатчика.
2.17 Чувствительность приемного устройства средств подвижной электросвязи при отношении сигнал/шум, равном 10 дБ на выходе приемника, должна быть не хуже 3 мкВ.
2.18 Приемные устройства с сеткой частот 25 кГц и 8,33 кГц должны обеспечивать номинальную полосу пропускания на уровне 6 дБ при нестабильности несущей +/- 0,005% и +/- 0,0005% соответственно от присвоенной частоты.
Ширина полосы пропускания должна включать доплеровский сдвиг 140 Гц.
2.19 Ширина полосы линейного тракта приемного устройства в телефонном режиме при неравномерности АЧХ не более 6 дБ должна быть не менее чем от 300 до 2700 Гц при шаге сетки частот 25 кГц и не менее чем от 350 до 2500 Гц при шаге сетки частот 8,33 кГц.
2.20 Приемное устройство, предназначенное для работы с разносом каналов 8,33 кГц, должно обеспечивать подавление помех при смещении на +/- 8,33 кГц относительно рабочей частоты не менее 60 дБ.
2.21 Побочные каналы приема радиоприемного устройства должны быть ослаблены не менее чем на 80 дБ в диапазоне частот от 0,15 до 940 МГц при отстройках более +/- 50 кГц.
2.22 В состав приемного устройства должен входить шумоподавитель с возможностью ступенчатой или плавной регулировки порога срабатывания.
2.23 Автоматическая регулировка усиления приемника должна обеспечивать изменение выходного напряжения не более 3 дБ при изменении входного сигнала от 3 мкВ до 100 мВ.
2.24 Выход должен быть симметричный, гальванически изолированный от корпуса.
2.25 Выходное сопротивление (должно быть 600 +/- 100) Ом.
2.26 Требования к радиосредствам в классе излучения A2D
Шаг сетки частот передатчика должен быть 25 кГц.
Выходная мощность передатчика должна составлять не менее 90% от номинального значения при подаче на его вход настроечной последовательности символов за время, не превышающее времени передачи 2,5 символов, каждый из которых представляет 000.
Максимальная глубина модуляции несущей тракта передачи данных передатчика должна быть не менее 60% в пределах входного уровня от 0,75 до 2 В на входном сопротивлении (600 +/- 100) Ом.
В режиме передачи данных в классе излучения A2D глубина модуляции на частотах 1200 и 2400 Гц не должна отличаться от глубины модуляции на частоте 1000 Гц более чем на +/- 3 дБ. Неравномерность группового времени запаздывания в диапазоне модулирующих частот 1200 - 2400 Гц должна быть не более 60 мкс.
В режиме приема данных в классе излучения A2D выходное напряжение в линии приема данных на частотах 1200 и 2400 Гц не должно отличаться от выходного напряжения на частоте 1000 Гц более чем на плюс 2 и минус 4 дБ. Неравномерность группового времени запаздывания в диапазоне модулирующих частот 1200 - 2400 Гц должна быть не более 65 мкс.
2.27 Требования к радиосредствам в классе излучения G1D
Чувствительность приемного тракта изделия в классе излучения G1D при BER = 10-3 должна быть не хуже минус 98 дБмВт.
Уровень мощности излучения передатчика, измеренный в пределах ширины полосы канала в 25 кГц, не должен превышать:
первого смежного канала: 2 дБм;
второго смежного канала: минус 28 дБм;
четвертого смежного канала: не должен превышать минус 38 дБм и от этого значения монотонно снижаться с минимальной нормой 5 дБ на октаву до максимального значения, равного минус 53 дБм.
2.28 Антенная система должна обеспечивать работу связного оборудования в диапазоне частот от 117,975 до 137 МГц.
2.29 Входной импеданс антенной системы должен быть рассчитан на подключение к ней фидера с волновым сопротивлением 50 Ом и в заданном диапазоне рабочих частот должен обеспечивать коэффициент стоячей волны не более 2.
2.30 Коэффициент усиления антенного излучателя по отношению к изотропному должен быть не менее 2 дБ.
2.31 Антенная система должна иметь вертикальную поляризацию.
2.32 Для антенн с круговой диаграммой направленности отклонение диаграммы от окружности не должно превышать 2,5 дБ.
2.33 В местном режиме управление должно осуществляться с передней панели радиосредства.
2.34 Средства подвижной электросвязи должны иметь возможность подключения аппаратуры автоматического контроля технического состояния с выдачей сигнализации в пункт управления.
2.35 В радиосредствах подвижной электросвязи должна быть предусмотрена возможность дистанционного управления режимом (передача/прием) с входного модуляционного трансформатора со средней точкой (фантомная цепь). Возможно управление радиосредствами с помощью частотной сигнализации, CAS-E1, VoIP? ? и т. п.
2.36 Средний срок службы должен составлять не менее 15 лет.
2.37 Средняя наработка на отказ должна составлять не менее 10 000 час.
2.38 Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ № 18
к Правилам (п. 28)
Требования к наземным средствам авиационной электросвязи диапазона высоких частот
1. К наземным средствам авиационной электросвязи ВЧ диапазона относятся:
а) радиоприемники;
б) радиопередатчики;
в) радиостанции;
г) автоматизированные приемо-передающие центры.
2 Тактико-технические требования
2.1 Радиопередатчик ВЧ-диапазона должен обеспечивать:
работу на любой из присвоенных частот в диапазоне от 1,5 до 30 МГц;
шаг сетки рабочих радиочастот 10 Гц, допускается 1 Гц и 100 Гц;
стабильность частоты несущей +/- 10 Гц;
излучение сигналов следующих классов:
J3E - однополосная телефония (верхняя боковая) с полосой частот от 350 до 2700 Гц при подавленной несущей;
H2B - однополосная телеграфия (верхняя боковая) с полной несущей для автоматического приема;
F1B - частотная телеграфия со сдвигом 170 Гц +/- 3% при работе со скоростью 100 Бод;
J2D (2K80J2DEN) - передача данных со скоростью 1800 бит/с (с использованием внешнего или встроенного модема).
Допускается излучение сигнала класса A3E (амплитудная модуляция с двумя боковыми полосами) и класса H3E (однополосная телефония с полной несущей, верхняя боковая);
неравномерность амплитудно-частотной характеристики однополосного тракта в полосе от 350 до 2700 Гц не более 3 дБ;
уровень остатка несущей в режиме излучения J3E не более минус 40 дБ;
уровень нелинейных комбинационных искажений, измеренный по методу двух тонов, не более минус 30 дБ;
время настройки передатчика на неподготовленную частоту не более 3 с, на подготовленную частоту (при предварительной настройке АнСУ) не более 50 мс;
уровень фоновых составляющих выходного колебания, измеренный в полосе частот от 30 до 300 Гц, не более минус 50 дБ;
в классе излучения J2D (2K80J2DEN) допускается уровень фоновых составляющих выходного сигнала, измеренный в полосе частот от 30 до 300 Гц, не более минус 48 дБ;
ширину контрольной полосы излучаемых частот в классе излучения J3E по уровню минус 30 дБ не более 3,2 кГц;
номинальную выходную мощность в режиме J3E при номинальном уровне входного информационного сигнала, равном 0,775 В +/- 6 дБ;
симметричное входное сопротивление телефонного канала 600 Ом +/- 10%;
номинальную выходную мощность радиопередатчика в пределах +/- 1 дБ за время не более 200 мс с момента нажатия тангенты (ключа) или с момента подачи команды на включение режима "излучение";
снижение уровня передаваемой мощности не менее чем на 10 дБ за 100 мс после отжатия тангенты (ключа) или с момента подачи команды на выключение режима "излучение".
Пиковая мощность любого излучения передатчика на любой дискретной частоте должна быть менее пиковой мощности передатчика при следующих отстройках ниже или выше относительно присвоенной частоты:
от 1,5 до 4,5 кГц - не менее чем на 30 дБ;
от 4,5 до 7,5 кГц - не менее чем на 38 дБ;
от 7,5 кГц и более - не менее чем на 60 дБ.
Передатчик должен обеспечивать работу с антенно-фидерным устройством, коэффициент стоячей волны которого не более 4.
Короткое замыкание и обрыв антенны на выходе передатчика, а также увеличение коэффициента стоячей волны в подключенном антенном фидере до значений более 4 не должны вызывать повреждения передатчика.
Радиопередатчик должен обеспечивать работу:
на симметричную фидерную линию с волновым сопротивлением 150, 300, 450 и 600 Ом;
на несимметричную фидерную линию с волновым сопротивлением 50 (75) Ом.
Радиопередатчик должен иметь систему встроенного контроля с отражением результатов контроля на встроенных индикаторах.
Управление работой радиопередатчика, а также индикация его состояния (работа, неисправность, авария) должны осуществляться в дистанционном и местном режимах.
Дистанционное управление передатчиком (тангента) должно проводиться по двухпроводной или четырехпроводной линии.
Дистанционную настройку на одну из ста или более настроенных (подготовленных) частот.
Относительное ослабление гармоник должно быть не менее 60 дБ на частотах до 3 fр, включительно, и не менее 70 дБ выше 3 fрдо 10 fр. Допускается понижение ослабления до 50 дБ на отдельных частотах до 3 fр, где fр- рабочая частота передатчика.
2.2 Радиоприемник ВЧ-диапазона должен обеспечивать:
работу на любой из присвоенных частот в диапазоне от 1,5 до 30 МГц с шагом сетки частот через 10 Гц. Допускается расширенный диапазон и шаг сетки частот через 1 и 100 Гц. Относительная годовая стабильность рабочих частот 10-7;
прием радиосигналов следующих классов:
J3E - однополосная телефонная с подавленной несущей, верхняя боковая;
H2B - однополосная телеграфия (верхняя боковая) с полной несущей для автоматического приема;
F1B - частотная телеграфия со сдвигом 170 Гц +/- 3% при работе со скоростью 100 Бод;
J2D (2K80J2DEN) - прием данных со скоростями до 1800 бит/с.
Допускается излучение сигнала класса A3E (амплитудная модуляция с двумя боковыми полосами) и H3E (однополосная телефонная с полной несущей, верхняя боковая);
коэффициент шума не выше:
17 дБ для приемников с повышенной избирательностью;
12 дБ для приемников с повышенной чувствительностью.
ширину полосы частот однополосного телефонного канала от 350 до 2700 Гц при неравномерности амплитудно-частотной характеристики не более 3 дБ;
неравномерность характеристики группового времени запаздывания низкочастотного однополосного тракта не более 0,5 мс;
уровень блокирующих помех:
при отстройке на +/- 20 кГц не менее 100 дБмкВ;
при отстройке относительно сигнала на +/- 5% не менее 120 дБмкВ;
диапазон АРУ не менее 80 дБ при изменении выходного уровня на 6 дБ;
ослабление составляющих интермодуляции внутри полосы пропускания приемника не менее 40 дБ;
уровень выходного сигнала приемника на симметричную линию от 0,775 до 2,3 В с возможностью регулировки.
В режиме передачи данных время установления АРУ при скачкообразном повышении уровня сигнала на входе приемника на 60 дБ не должно превышать 10 мс, а при уменьшении уровня сигнала на 60 дБ должно быть не более 25 мс.
Приемник должен сохранять работоспособность после воздействия на его вход высокочастотного сигнала с электродвижущей силой 100 В, в том числе и на частоте настройки приемника.
Приемник должен иметь следующие выходы и входы:
выход НЧ-сигналов на симметричную линию (600 +/- 60) Ом для телефонных видов работы;
выход телеграфных сигналов на буквопечатающую аппаратуру;
выход для подключения головных телефонов;
антенный вход с номинальным значением сопротивления 75 (50) Ом или 200 Ом через симметрирующий трансформатор.
Радиоприемник должен иметь систему встроенного контроля и самоконтроля с отражением результатов контроля на встроенных индикаторах.
Радиосредства ВЧ-диапазона должны иметь систему местного управления (непосредственно с лицевой панели). Должна быть предусмотрена возможность дистанционного управления режимом (передача/прием) с помощью частотной сигнализации, CAS-E1, VoIP? ? и т. п.
2.3 Средний срок службы должен составлять не менее 15 лет.
2.4 Средняя наработка на отказ должна составлять не менее 10 000 час.
2.5 Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ № 19
к Правилам (п. 29)
Требования к системе коммутации речевой связи (СКРС)
1. Состав СКРС:
оборудование рабочих мест;
коммутационное оборудование (при наличии);
интерфейсное оборудование;
внутренняя сеть передачи данных;
система технического контроля и управления;
внутренняя сеть электропитания.
2. Тактико-технические требования
2.1 Архитектура СКРС должна обеспечивать возможность построения следующих конфигураций:
недублированной системы радиосвязи или телефонной связи;
дублированной системы радиосвязи и телефонной связи;
отдельных дублированных систем радио и телефонной связи.
2.2 В СКРС должно быть предусмотрено:
коммутационное оборудование (при наличии) и внутренняя сеть передачи данных должны быть дублированы;
оба сегмента должны работать в полностью независимом и параллельном режиме (должна отсутствовать какая-либо иерархия основной/резервный);
выбор рабочего сегмента в конкретный момент времени должен проводиться индивидуальным процессором оконечного оборудования методом взвешивания сигнала;
дублирование сети передачи данных контроля и управления в соответствии со схемой резервирования контролируемых ими устройств;
дублирование внутрисистемной распределительной сети электропитания (оборудование рабочих мест, коммутационное и интерфейсное оборудование должно иметь возможность подключения к двум фидерам электропитания).
2.3 Интерфейсное оборудование СКРС должно обеспечивать сопряжение со следующими типами линий и каналов связи:
2-проводные, 4-проводные и 6-проводные физические соединительные линии;
стандартные каналы тональной частоты с 2-проводным и 4-проводным окончанием;
интерфейс основного цифрового канала (ОЦК) со скоростью 64 кбит/с;
интерфейс первичного цифрового канала со скоростью передачи 2048 кбит/с.
2.4 Интерфейсное оборудование СКРС должно обеспечивать сопряжение с радиопередающим и радиоприемным оборудованием по следующим линиям и каналам связи:
4-проводная линия (одна пара для передачи, другая для приема) с передачей команд "тангента"/"определение несущей" через среднюю точку трансформатора (фантомная цепь) сигналом минус 27 В;
4-проводная линия (одна пара для передачи, другая для приема) с передачей команд "тангента"/"определение несущей" через среднюю точку трансформатора (фантомная цепь) сигналом +27 В;
4-проводная линия (одна пара для передачи, другая для приема) с передачей команд "тангента"/"определение несущей" через среднюю точку трансформатора (фантомная цепь) сигналом "Земля";
6-проводная линия с передачей команд "Тангента"/"Определение несущей" по одной паре проводов;
4-проводная линия с передачей команд "Тангента"/"Обнаружение несущей" тональным сигналом частотой 1020/2600 Гц;
канал связи 2048 кбит/с (E1) с сигнализацией CAS для передачи команды "Тангента";
канал связи 2048 кбит/с (E1) с внутриполосной передачей команды "Тангента" тональным сигналом в спектре речевого сигнала частотой 1020 Гц;
линия передачи команд управления и речевой информации в системах VoIP (Eurocae ED-137 - Interoperability Standards for VoIP ATM Components (Стандарт совместимости компонентов системы VoIP для ОрВД)).
2.5 Интерфейсное оборудование радиосвязи СКРС должно обеспечивать:
а) прием/передачу следующих сигналов:
речевой сигнал основного приемника;
речевой сигнал резервного приемника;
речевой сигнал основного передатчика;
речевой сигнал резервного передатчика;
сигнал обнаружения несущей основного приемника;
сигнал обнаружения несущей резервного приемника;
сигнал «тангента» основного передатчика;
сигнал «тангента» резервного передатчика;
сигнал переключения с основного приемника на резервный;
сигнал переключения с основного передатчика на резервный;
б) управление радиостанциями как в местном (по физическим линиям), так и в дистанционном режимах.
2.6 В части организации связи «диспетчер - диспетчер» СКРС должна обеспечивать возможность физического и логического сопряжения со следующими типами оборудования оперативной громкоговорящей и телефонной связи:
2-проводным телефонным оборудованием с питанием от местной батареи;
аппаратурой с вызовом голосом при постоянно подключенном канале связи;
телефонным оборудованием, использующим сигнальную процедуру ATS-R2;
телефонным оборудованием, использующим сигнальную процедуру ATS-QSIG;
телефонным оборудованием, использующим сигнальные процедуры E&M;
2-проводными абонентскими линиями УПАТС (с импульсным и частотным набором);
оборудованием ЦСИО-2B+D (базовая скорость);
оборудованием ЦСИО-30B+D (первичная скорость);
оборудованием по протоколам семейства IP/SIP;
оборудованием VoIP по протоколам в соответствии с? Eurocae ED-137 - Interoperability Standards for VoIP ATM Components (Стандарт совместимости компонентов системы VoIP для ОрВД) и Eurocae ED-136 - Voice over Internet Protocol (VoIP) Air Traffic Management (ATM) System Operational and Technical Requirements (Эксплуатационные и технические требования к системе VoIP для ОрВД). Февраль 2009).
2.7 СКРС должна обеспечивать:
Полностью неблокируемую архитектуру коммутационного оборудования и внутренних магистралей, обеспечивающую неограниченный доступ к любому абоненту (рабочему месту или внешнему интерфейсу) независимо от текущей загрузки системы.
Модульное наращивание (добавление оборудования рабочих мест, внешних интерфейсных модулей, коммутационных модулей) без перерыва текущего функционирования, за исключением перегрузки программного обеспечения при изменении конфигурации.
Вынос оборудования рабочего места (без какой-либо потери его функций) на расстояние до 100 м по длине кабеля без применения промежуточных регенерирующих устройств и на большее расстояние с использованием дополнительных устройств.
В СКРС должны быть предусмотрены отдельные специальные выходы для обеспечения возможности подключения аппаратуры регистрации информации:
2-проводный аналоговый выход;
цифровой выход E1 (при наличии);
цифровой выход VoIP;
выходы для документирования речевой информации (объединенного входящего и исходящего речевого сигнала):
с каждого комплекта оборудования рабочего места;
с каждого интерфейса радио или телефонного канала.
Синхронизацию речевых цифровых трактов как от внутреннего таймера (системы синхронизации), так и от внешней общегосударственной или учрежденческой сети связи по следующим типам цифровых каналов:
групповому каналу со скоростью 2048 кбит/с (в соответствии с? Рекомендациями МСЭ-Т G.703/6)? и Рекомендациями МСЭ-Т G.704);
каналу ISDN (базовая скорость);
каналу ISDN (первичная скорость).
Синхронизацию от внешнего источника единого времени и последующее распределение информации точного времени (дата: день, месяц, год и время: часы, минуты, секунды) по рабочим местам диспетчеров.
Полосу пропускания звуковых трактов не хуже, чем от 300 до 3400 Гц.
Неравномерность амплитудно-частотной характеристики речевых трактов в полосе частот от 300 до 3400 Гц не хуже +/- 3 дБ.
СКРС должна обеспечивать переходное затухание не менее 70 дБ между несвязанными разговорными цепями на ближнем и дальнем концах цепи на частоте 1020 Гц.
Для сопряжения с оборудованием ISDN (первичная скорость), ISDN (базовая скорость) и QSIG интерфейсное оборудование должно применять преобразование сигнала в соответствии с Рекомендациями МСЭ-Т G.711.
Для функционирования в сети ATS-QSIG интерфейсное оборудование должно применять компрессию в соответствии с Рекомендациями МСЭ-Т G.728.
Для функционирования в сети ATS-VoIP интерфейсное оборудование должно применять преобразование сигнала в соответствии с Рекомендациями МСЭ-Т G.711.
Для функционирования в сети ATS-VoIP интерфейсное оборудование должно осуществлять компрессию в соответствии с? Рекомендациями МСЭ-Т G.728 ?и Рекомендациями МСЭ-Т G.729.
Максимальное время появления сигнала «Тангента» на выходе интерфейсного оборудования должно составлять не более 100 мс от момента окончания формирования такого сигнала (нажатия кнопки/клавиши/педали «Тангента») на соответствующем ОРМ.
Максимальное время появления речевого сигнала на выходе интерфейсного оборудования должно составлять не более 100 мс с момента его поступления на микрофонный вход соответствующего ОРМ.
Время полной загрузки СКРС (без вмешательства обслуживающего персонала) с момента включения электропитания до момента полной готовности всех рабочих мест не более 3 мин.
В части радиосвязи СКРС должна обеспечивать:
коллективное использование одного радиоканала не менее чем 16 рабочими местами;
исключение возможности выхода в эфир более чем одного диспетчера при коллективном использовании радиоканала;
одновременную передачу по всем радиоканалам, выбранным в режим "Управление";
индикацию сигнала "тангента" на всех рабочих местах, имеющих доступ к радиостанции коллективного использования;
индикацию сигнала обнаружения несущей (включения шумоподавителя) на всех рабочих местах, имеющих доступ к данной радиостанции;
автогенерацию сигнала обнаружения несущей при обнаружении речевого сигнала на радиоинтерфейсе и индикации его на всех рабочих местах, имеющих доступ к данной радиостанции;
организацию режима работы до пяти радиостанций на одной частоте (режим с разносом несущих) с возможностью запрета использования одного и того же радиоканала в режиме с разносом и без разноса несущих;
индивидуальный для каждой частоты выбор одного из следующих режимов использования радиоканала с индикацией выбранного режима:
«Отключен»;
«Прослушивание»;
«Управление».
Индивидуальный для каждой частоты выбор одного из режимов прослушивания с индикацией выбранного режима:
«Громкоговоритель»;
«Головная гарнитура».
Автоматический выбор наилучшего сигнала от нескольких (от 2 до не менее 5) радиоприемников, работающих на одной частоте.
Блокировку речевого сигнала приемника при работе передатчика, а также индикацию обнаружения несущей независимо от состояния шумоподавителя приемника.
Настройку задержек сигналов, принимаемых от нескольких радиоприемников или передаваемых на несколько передатчиков, работающих на одной частоте.
Отображение значения радиочастот на рабочем месте при помощи не менее семи буквенно-цифровых символов.
СКРС должна обеспечивать возможность организации связи с воздушными судами по радиоканалам системы избирательного вызова SELCAL (SELCAL 32).
Вызов абонента в режиме SELCAL должен осуществляться следующими способами:
выбор позывного/кода воздушного судна из списка ВС;
набор кода воздушного судна при помощи телефонной тастатуры.
В части оперативно-командной телефонной и громкоговорящей связи СКРС должна обеспечивать:
автоматический набор последнего набранного номера косвенного доступа;
автоматический набор номера внешнего канала или абонента в системах с избирательным вызовом, телефонного номера и кодов функций косвенного доступа при помощи клавиш прямого доступа;
идентификацию входящего вызова от внешнего абонента и индикацию его поступления на рабочее место диспетчера;
визуальную индикацию занятости рабочего места, внешнего канала или линии на всех рабочих местах, имеющих к ним прямой доступ;
акустическую информацию о процессе установления соединения и состоянии абонентов и каналов связи;
отображение номера или буквенно-цифрового идентификатора вызываемого/вызывающего абонента при организации вызова косвенного доступа;
отображение поступившего вызова прямого доступа в случае, если клавиша вызывающего абонента закрыта в настоящий момент вызываемым объектом (например, окном телефонной тастатуры);
активизацию каждой функции пользователя при помощи нажатия специальной функциональной клавиши либо путем набора ее специального функционального кода на телефонной тастатуре;
автоматический повторный набор последнего набранного номера;
автоматический набор запрограммированного номера;
доступ к линиям АТС/УПАТС;
формирование следующих акустических сигналов:
тональных сигналов контроля посылки вызова;
тональных сигналов «занято»;
тональных сигналов занятости трактов;
тонального сигнала вывода из обслуживания;
автоматический разрыв соединения в случае отсутствия в течение 15 с речевого сигнала на линии;
постоянную индикацию состояния абонентов (свободен, занят, вызывает) в клавишах прямого доступа;
установление исходящего соединения «Прямым оперативным доступом», «Прямым доступом», «Косвенным доступом».
Примечание:
«Прямой оперативный доступ» - установление сеанса связи после нажатия соответствующей адресной кнопки без каких-либо ответных действий со стороны вызываемого абонента.
«Прямой доступ» - установление сеанса связи после нажатия соответствующей адресной кнопки и ответа вызываемого абонента.
«Косвенный доступ» - установление сеанса связи после ввода номера вызываемого абонента и ответа абонента.
Количество клавиш прямого доступа на одной странице устройства сенсорного ввода команд и возможное общее количество страниц должны иметь возможность программной адаптации.
Абонентами исходящих вызовов прямого оперативного доступа и прямого доступа могут быть как внутренние, так и внешние абоненты системы коммутации речевой связи, независимо от типа имеющегося у них оборудования;
акустическую и визуальную индикацию установления соединения при вызовах прямым и косвенным доступом на рабочем месте вызывающего абонента с отображением номера и/или буквенно-цифрового кода вызываемого абонента при вызове косвенным доступом;
акустическую и визуальную индикацию вызова прямым или косвенным доступом с отображением номера и/или буквенно-цифрового кода вызываемого абонента и возможность включения/отключения акустического сигнала вызова;
ответ на поступивший вызов нажатием соответствующей клавиши прямого доступа или клавиши «Общий ответ» при поступлении вызова косвенного доступа.
При поступлении вызова косвенного доступа от абонента, имеющего на вызываемом рабочем месте клавишу прямого доступа, индикация вызова и ответ на вызов должны осуществляться при помощи клавиши прямого доступа;
отбой установленного соединения при помощи специальной клавиши «Отбой» ответом на следующий вызов прямого или косвенного доступа или новым вызовом прямого доступа;
организацию очереди для вызовов косвенного доступа с возможностью хранения не менее трех вызовов;
выполнение функции групповой переадресации всех входящих вызовов на другое рабочее место любому абоненту прямого или косвенного доступа с индикацией переадресации и идентификатора абонента;
последовательную переадресацию входящих вызовов. Исключение возможности шлейфования;
переадресацию одиночного текущего вызова любому абоненту прямого или косвенного доступа на другое рабочее место;
удержание текущего соединения для организации другого или ответа на следующий поступивший вызов с индикацией активизации данного режима как на рабочем месте инициатора удержания, так и на рабочем месте удерживаемого абонента;
поочередное переключение между текущим и удерживаемым соединениями;
организацию режима конференц-связи в пределах группы как внутренних, так и внешних абонентов;
предоставление инициатору режима конференц-связи возможности изменения состава участников;
выход из режима конференц-связи любого из участников, полное отключение режима конференц-связи только его инициатором;
временный выход любого из участников из режима конференц-связи в режим удержания;
принудительный вызов абонента, занятого текущим соединением, за исключением соединения прямого оперативного доступа;
набор сокращенного номера из общего списка, доступного для всех внутренних абонентов системы коммутации речевой связи. Для сокращенного набора номера должны быть доступны как внутренние, так и внешние абоненты системы. Объем списка доступных сокращенных номеров должен иметь возможность программной адаптации;
посылку индукторного вызова (сигнала звонка) в канал после его занятия;
предопределенный (из заранее запрограммированной группы абонентов) режим конференц-связи нажатием клавиши прямого доступа. Данный режим должен быть предварительно сконфигурирован в системе технического контроля и управления;
неизбирательный групповой вызов до 16 абонентов прямым и/или косвенным доступом от внутреннего или внешнего абонента с возможностью организации нескольких групп;
выборочный прием ожидающих обслуживания избирательных вызовов от другого рабочего места;
выборочное прослушивание переговоров с одного или нескольких рабочих мест с рабочего места руководителя полетов/супервизора;
временный выход из режима прослушивания с удержанием прослушиваемого рабочего места при установлении соединения на прослушивающем рабочем месте. Автоматическое исключение возможности прослушивания друг друга.
2.8 Программное обеспечение СТКУ должно обеспечивать возможность диагностики, обнаружения отказов и сбоев, локализации отказавших элементов и вывода из обслуживания дефектного тракта или линии. Данный вид программного обеспечения должен функционировать в фоновом режиме и не должен оказывать какого-либо влияния на функционирование системы.
Программное обеспечение СКРС должно предусматривать:
возможность наращивания системы, управления модификацией и конфигурацией;
возможность корректировки баз данных и изменяемых параметров.
Программное обеспечение СКРС должно обеспечивать:
обнаружение ошибок и сбоев, толерантность к отказам и самовосстановление;
резервирование программного обеспечения, служащего для выполнения функций по установлению соединений, и дублированное хранение программ и базы данных.
2.9 Оборудование и программное обеспечение рабочего места должны обеспечивать следующие функциональные возможности:
раздельное прослушивание информации радиосвязи и телефонной связи через отдельные громкоговорители и гарнитуру;
подключение двух разговорных приборов (головных гарнитур и/или микротелефонных трубок) к одному рабочему месту;
подключение одной ножной педали включения сигнала "тангента";
использование для взаимодействия "оператор - машина" клавишно-ламповых модулей или устройств сенсорного ввода команд;
выбор из нескольких типов вызывных акустических сигналов (звонок, короткий тональный сигнал, колокольчик), регулировку их уровня, а также их отключение с возможностью программной адаптации количества, типов и формы акустических сигналов вызова;
раздельную регулировку уровня громкости принимаемых речевых сигналов на громкоговорителях и гарнитуре;
запрет полного отключения звукового сигнала;
плавную или пошаговую регулировку уровня фонового подсвета;
ввод режима разделения гарнитуры, при котором сигналы радиосвязи принимаются на один наушник, а сигналы телефонной связи на другой;
экстренное повышение уровня принимаемого речевого сигнала.
СКРС должна обеспечивать следующие функциональные возможности пользователя телефонной связи:
блокировку панели при проведении профилактических работ;
запуск режима самопроверки рабочего места с отображением результатов проверки на специальном дисплее устройства сенсорного ввода команд.
2.10 Отказ индивидуального процессора оконечного оборудования не должен приводить к отказу более чем одного рабочего места и оказывать воздействие на функционирование и работоспособность остального оборудования.
Отказ одного модуля интерфейсного оборудования не должен приводить к прекращению работы более чем двух радиоканалов или телефонных линий и оказывать воздействие на функционирование и работоспособность остального оборудования.
2.11 Коммутационное оборудование СКРС не должно содержать элементы или модули, представляющие собой единую точку отказа, приводящую (с учетом резерва) к отказу СКРС. Расчетный коэффициент готовности СКРС должен соответствовать Кг = 0,999995 (без учета внешних каналов связи).
2.12 СКРС должна обеспечивать непрерывную, круглосуточную работу на протяжении всего срока эксплуатации без отключения на какие-либо виды технического обслуживания и ремонта.
2.13 Замена любого компонента СКРС (типового элемента замены) должна осуществляться без прерывания функционирования системы. СКРС должна обеспечивать возможность автоматической загрузки параметров заменяемого элемента без вмешательства обслуживающего персонала.
2.14 Замена любого компонента СКРС (типового элемента замены) должна осуществляться без отключения электропитания.
2.15 Система технического контроля и управления СКРС должна обеспечивать:
а) непрерывный автоматический контроль состояния оборудования и постоянную индикацию работоспособности системы в целом и отдельных ее компонентов (до уровня типового элемента замены), независимо от операций, совершаемых на терминале супервизора;
б) управление системой коммутации речевой связи в автоматическом и ручном режимах посредством ввода соответствующих команд с функциональной клавиатуры и выполнение следующих задач:
запуск и перезапуск системы в целом и ее составных частей с индикацией их состояния;
контроль и управление режимами работы системы, ее составных частей и рабочих мест с индикацией режима работы;
ручную реконфигурацию с использованием меню реконфигурации;
запуск тестовых программ и отображение результатов их выполнения;
в) задание нескольких конфигураций для одного рабочего места (радио и/или телефонной связи) и оперативный ввод одной из них (при объединении секторов, резервировании);
г) программное изменение (неоперативное) конфигурации системы, включая:
распределение радиоканалов по рабочим местам;
распределение радиостанций в кнопочных полях на рабочем месте радиосвязи;
изменение режимов использования радиосредств (индивидуальное/коллективное, прием/передача);
распределение телефонных линий по рабочим местам;
распределение абонентов прямого доступа в кнопочных полях рабочего места телефонной связи;
изменение уровня приоритета рабочих мест и абонентов системы.
Действия по реконфигурации директорий радиоканалов, телефонных линий и рабочих мест не должны оказывать влияние на текущую работу системы;
д) ввод модифицированной конфигурации только при помощи специальных команд, а также регистрацию и документирование таких вводов;
е) регистрацию статистической информации о трафике радио и телефонных каналов и рабочих мест;
ж) просмотр журналов регистрации неисправностей, данных о трафике речевых сообщений и пультовых операциях, составление статистических отчетов о трафике и неисправностях по созданным пользователями шаблонам, а также их выборочную распечатку на принтере и копирование файлов на внешний носитель (с обеспечением защиты информации);
и) введение функций реконфигурации сети связи, а также блокировки средств связи диспетчера при производстве ремонтно-восстановительных и профилактических работ;
к) программное разделение терминала(ов) СТКУ на функции оперативного управления и технического контроля путем применения нескольких уровней паролей, а также защиту от неправильных действий оператора;
л) автоматическое составление статистических отчетов о надежностных характеристиках системы в целом и отдельных ее компонентов.
Функционирование (или отказ) системы технического контроля и управления не должно оказывать какого-либо воздействия на выполнения СКРС своих основных задач (установление соединений радио и телефонной связи, обеспечение функций обслуживания).
2.16 В СКРС должна обеспечиваться возможность управления системой одновременно с нескольких рабочих мест СТКУ (не менее трех) с обеспечением регистрации и контроля входа пользователей по именам и паролям (логин/пароль), разделения их на группы по уровням доступа (не менее трех).
2.17 Средний срок службы должен составлять не менее 10 лет.
2.18 Средняя наработка на отказ должна составлять не менее 10 000 час.
2.19 Среднее время восстановления должно быть не более 30 мин.
ПРИЛОЖЕНИЕ № 20
к Правилам (п. 31)
Требования к комплексу средств автоматизации управления воздушным движением (КСА УВД)
1.1. Состав КСА УВД включает:
групповые средства приема и обработки информации;
автоматизированные рабочие места диспетчеров УВД (далее - АРМ);
средства документирования и воспроизведения информации;
средства единого времени (далее - СЕВ) (рекомендация);
средства технического управления и контроля (далее - СТУК);
пультовое оборудование (диспетчерские пульты); (рекомендация);
комплект системного и прикладного программного обеспечения.
Примечание: Пультовое оборудование (диспетчерские пульты) входящие в состав КСА УВД, должны соответствовать сертификационным требованиям к диспетчерским пультам.
1.2. КСА УВД должен обеспечивать возможность подключения различных источников информации и взаимодействующих технических средств, наращивания инструментальной емкости и расширения перечня решаемых функциональных задач, модернизации или замены отдельных технических средств на более современные аналоги в процессе эксплуатации КСА УВД без прекращения его функционирования.
1.3. В КСА УВД должна обеспечиваться возможность корректировки сменных констант, изменяемых параметров системы (далее - ИПС) и аэронавигационной информации. Внесение измененных сменных констант, ИПС и аэронавигационной информации должно осуществляться силами эксплуатирующей организации без единовременного перезапуска серверов и автоматизированных рабочих мест.
1.4. Должно осуществляться администрирование КСА УВД с автоматизированного рабочего места системного администратора, входящего в состав СТУК.
1.5. КСА УВД должен обеспечивать авторизацию пользователей для регистрации в КСА УВД процесса приема/сдачи дежурства диспетчеров с возможностью отображения и вывода на печать на выделенном рабочем месте статистических данных о приеме/сдаче дежурства диспетчеров с набором фильтров.
1.6. Должен быть предусмотрен резерв ресурсов производительности основных элементов КСА УВД с учетом основных и резервных АРМ (загрузки центрального процессора, загрузки оперативной памяти, загрузки накопителей на жестких дисках/твердотельных накопителях, загрузки сетевого оборудования) не менее 30% при максимальной нагрузке.
1.7. Должна обеспечиваться возможность определения резерва ресурсов производительности основных элементов КСА УВД (загрузки центрального процессора, загрузки оперативной памяти, загрузки накопителя на жестком диске/твердотельном накопителе, загрузки сетевого оборудования) в процессе эксплуатации с фиксацией максимальной загрузки и сигнализацией о превышении установленных пороговых значений.
1.8. В КСА УВД должна использоваться геоцентрическая система координат на базе математической модели Земли ПЗ-90.11/WGS-84.
1.9. КСА УВД должен обеспечивать непрерывный контроль за движением ВС в пределах зон видимости средств наблюдения и решение функциональных задач на площади:
не менее 2500?2500 км на высотах от 0 м до 20000 м (для КСА УВД регионального центра).
не менее 1000?1000 км на высотах от 0 м до 20000 м (для КСА УВД аэроузлового центра);
не менее 300?300 км на высотах от 0 м до 10000 м (для КСА УВД аэродромного центра).
1.10. Должна быть предусмотрена работа КСА УВД в круглосуточном режиме.
1.11. Групповые средства приема и обработки информации, средства технического управления и контроля, средства единого времени (при наличии в составе КСА УВД) должны иметь нагруженный резерв.
1.12. Время перезапуска модуля отображения информации наблюдения автоматизированного рабочего места диспетчера не должно превышать 4 мин., других отдельных модулей (сервера, средства обработки, сетевого устройства) после подачи команды на перезапуск не более 7 мин.
1.13. Время реакции технических средств КСА УВД на вводы (запросы) оперативного персонала должно быть не более 0,5 с по информации наблюдения, 1,0 с при запросе списочной плановой информации и не более 5,0 с при обращении к справочной информации.
Диспетчерские АРМ должны иметь резервный комплект из расчета одно резервное рабочее место на 5 основных, но не менее одного резервного АРМ. Функциональность и состав резервных рабочих мест должны быть идентичны основным. Время перевода любого резервного АРМ в любое рабочее АРМ и наоборот должно составлять не более 30 секунд от подачи команды инженером СТУК.
1.14. АРМ диспетчеров, АРМ СТУК должны иметь в составе основной индикатор (цветной монитор) с диагональю не менее не менее 53 см (21 дюйма).
1.15. Рекомендация. АРМ диспетчеров должен иметь в составе дополнительный индикатор (цветной монитор) диагональю не менее 53 см (21 дюйм).
1.16. Индикаторные устройства (мониторы), входящие в состав оборудования рабочих мест КСА УВД, должны обеспечивать возможность считывания всей отображаемой информации при освещенности в плоскости экрана до 350 люкс (для помещений без естественного освещения) и 1000 люкс (для помещений с естественным освещением).
1.17. СЕВ должна обеспечивать:
формирование шкалы системного времени, содержащей текущие величины следующих параметров: год, месяц, число, час, минута, секунда и день недели;
привязка шкалы системного времени к шкале всемирного координированного времени (UTC) при сопряжении с приемниками сигналов GPS/ГЛОНАСС. Должна быть обеспечена возможность выбора режима работы по сигналам любой из систем, а также их совместного использования;
выдачу шкалы системного времени в локальную вычислительную сеть и/или по последовательному интерфейсу RS-232/ RS-422/RS-485;
синхронизацию всех технических средств со шкалой системного времени по протоколу синхронизации NTP;
возможность поддержания шкалы системного времени при пропадании сигналов ГНСС. Относительная нестабильность положения секундной метки шкалы системного времени при отсутствии сигналов ГНСС должна составлять не более 10-4;
средняя квадратическая погрешность положения шкалы системного времени (?) при наличии сигналов ГНСС относительно шкалы должна составлять не более 5 мс.
1.18. Должна обеспечиваться возможность резервного копирования и восстановления данных с обязательной проверкой на их целостность и предоставление информации о неполном восстановлении данных.
1.19. Человеко-машинный интерфейс должен быть реализован с использованием букв латинского алфавита и кириллицы.
1.20. На КСА УВД должны быть установлены показатели срока службы или ресурса, среднего времени восстановления и коэффициент технической готовности:
срок службы - не менее 7 лет или назначенный ресурс -не менее 61500 часов;
среднее время восстановления - не более 30 минут;
коэффициент технической готовности - не менее 0,9995.
2. ТРЕБОВАНИЯ К ФУНКЦИЯМ ПРИЕМА И ОБРАБОТКИ ИНФОРМАЦИИ НАБЛЮДЕНИЯ О ВОЗДУШНОЙ ОБСТАНОВКЕ
В КСА УВД должны обеспечиваться:
2.1. Автоматический сбор и обработка информации о воздушной обстановке для выдачи на рабочие места:
графических отметок и координат местоположения ВС и других объектов, находящихся в контролируемом пространстве;
дополнительной информации от ВС, оборудованных приемоответчиками вторичной радиолокации, автоматического зависимого наблюдения радиовещательного типа.
2.2. Сопряжение по стандартным протоколам (ASTERIX) с источниками информации наблюдения:
трассовые и аэродромные первичные обзорные РЛС (далее - ОРЛ);
трассовые и аэродромные вторичные обзорные РЛС (далее - ВРЛ) режимов УВД, A/С RBS, S;
ВРЛ режима государственного радиолокационного опознавания (4 и 6 режим) (рекомендация);
трассовые и аэродромные радиолокационные комплексы (далее - РЛК);
средства автоматического зависимого наблюдения радиовещательного типа (далее - АЗН-В) с линией передачи данных 1090 ES;
средства АЗН-В с линией передачи данных VDL-4 (рекомендация);
многопозиционные системы наблюдения (далее - МПСН);
радиолокационные системы обзора летного поля (далее - РЛС ОЛП) (только для аэродромного КСА УВД);
взаимодействующие автоматизированные системы (комплексы средств автоматизации) УВД.
2.3. Прием по согласованным протоколам, обработка и отображение радиопеленгационной информации от автоматических радиопеленгаторов (далее - АРП).
Отображение на ИВО рабочих мест диспетчеров УВД линий пеленга от АРП не позднее, чем через 1 с после появления пеленгационного сигнала на входе аппаратуры приема и обработки информации и прекращение отображения пеленга не позднее, чем через 1 с после окончания сеанса связи.
2.4. Возможность сопряжения не менее, чем:
с 100 источниками информации наблюдения (для КСА УВД регионального центра);
с 80 источниками информации наблюдения (для КСА УВД аэроузлового центра);
с 20 источниками информации наблюдения (для КСА УВД аэродромного центра).
2.5. Автоматический ввод ВС в сопровождение по данным ОРЛ, ВРЛ, АЗН-В, МПСН и их комбинаций и автоматическое отображение формуляров сопровождения (далее - ФС) ВС.
2.6. Объединение информации наблюдения от различных систем и средств наблюдения.
2.7. Автоматическое непрерывное сопровождение ВС по информации наблюдения в диапазоне скоростей:
от 70 до 1500 км/ч и поперечном ускорении от 0 до 6 м/с2 включительно.
от 1500 до 3000 км/ч и поперечном ускорении от 0 до 3 м/с2 включительно.
2.8. Количество одновременно сопровождаемых треков ВС по информации наблюдения должно быть:
не менее 500 (для регионального центра);
не менее 350 (для аэроузлового центра);
не менее 200 (для аэродромного центра).
2.9. Отображение оцифрованной аналоговой информации, поступающей от обзорных РЛС.
2.10. Отображение текущего местоположения ВС в виде отметок с предысторией, настраиваемой оперативно, а также некоррелированных отметок и их оперативный выбор на отображение.
2.11. Автоматизированный процесс приема/передачи управления ВС между диспетчерами смежных секторов.
2.12. Ручной прием/передача ВС под управление.
2.13. Ручное снятие ВС с управления.
2.14. Расчет векторов экстраполированного местоположения ВС для отображения:
вектора прогноза на заданное время;
вектора заданного расстояния.
2.15. Автоматическое оповещение диспетчеров о не поступлении координатной и дополнительной информации наблюдения.
2.16. Автоматизированный пересчет и отображение в ФС высоты полета ВС в условиях использования давления, приведенного к уровню моря по стандартной атмосфере QNH.
2.17. Автоматический расчет и отображение путевых скоростей ВС в км/час и узлах (по выбору).
2.18. Автоматический расчет и отображение вертикальных скоростей ВС в м/с или фут/мин (по выбору).
2.19 Автоматический контроль выдерживания ВС заданного эшелона и сигнализация об отклонениях более 60 м при полетах по сокращенным нормам вертикального эшелонирования (далее - RVSM), регистрация этих отклонений.
2.20. Автоматический контроль выдерживания ВС заданного эшелона и регистрация случаев отклонения ВС от заданного эшелона, равных или превышающих 90 м, при полетах вне эшелонов RVSM.
2.21. Анализ и индикация на ИВО диспетчера конфликтных (повторяющихся, дублирующихся) кодов ВРЛ.
3. ТРЕБОВАНИЯ К ФУНКЦИЯМ ПРИЕМА, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ПЛАНОВ ПОЛЕТОВ
В КСА УВД должны обеспечиваться:
3.1. Прием от комплекса средств автоматизации планирования использования воздушного пространства (далее - КСА ПИВП) по согласованным протоколам и обработка планов полетов и формализованных сообщений по ОВД в соответствии с документом ИКАО Doc 4444 «Правила аэронавигационного обслуживания. Организация воздушного движения» и Табелем сообщений о движении воздушных судов в Российской Федерации.
3.2. Число обрабатываемых планов полетов должно быть:
для КСА УВД регионального центра ОВД: не менее 10000 пассивных планов полета;
для КСА УВД аэроузлового центра: не менее 6000 пассивных планов полетов; не менее 700 активных планов полета;
не менее 1000 активных планов полета. для КСА УВД аэродромного центра ОВД: не менее 4000 пассивных планов полетов; не менее 300 активных планов полета.
Примечание:
Под пассивными планами полетов понимаются планы полетов, содержащиеся в базе данных системных планов полета, а также плановая информация по иной деятельности в районе ответственности органа ОВД в период не более, чем за 120 часов до времени начала полета или иной деятельности по использованию воздушного пространства (далее - ИВП);
Под активными планами полетов понимаются планы полетов, находящихся под управлением в текущий момент времени и планируемых к поступлению под управление в период не более 30 мин (ИПС) от планируемого времени прилета/вылета (до входа в зону), а также переданные на управление смежному органу ОВД и сохраняемые в базе системных планов полетов за период до 15 мин (ИПС).
3.3. Прием плановой информации от внешних АС (КСА) УВД по стандартным информационным протоколам (ASTERIX, OLDI, AIDC).
3.4. Прием от КСА ПИВП и отображение сообщений об ограничениях ИВП.
3.5. Автоматическое формирование и передача в КСА ПИВП сообщения о пересечении ВС государственной границы.
3.6 Прием и обработка формализованных сообщений по ОВД и автоматическая корректировка планов полетов по поступившим сообщениям.
3.7. Возможность формирования на рабочих местах диспетчеров формализованных сообщений по ОВД, их ввод и передача по АНС ПД и ТС.
3.8. Присвоение системному плану уникального идентификатора (индекса), исключающего возможность наличия в системе двух и более системных планов полетов, у которых опознавательный индекс ВС, аэродром вылета, аэродром назначения, дата и время выполнения полета совпадают.
3.9. Возможность вывода на отображение планов ИВП, хранящихся в КСА УВД, их корректировка и сохранение.
3.10. Автоматическая и ручная активация планов полета.
3.11. Автоматическая коррекция плановой информации по данным автосопровождения ВС.
3.12. Ручная привязка информации текущего плана полета к треку для ВС, не оборудованных ответчиками.
3.13. Автоматический перевод ФС ВС в список потерь при отсутствии информации наблюдения по данному ВС в течение заданного времени (ИПС) и невозможности перевода в трек по плану.
3.14. Автоматическое восстановление отображения ФС ВС и автосопровождения ВС, имеющих план полета и оборудованных ответчиками, и ручное восстановление автосопровождения из списка потерь и отображения ФС ВС, не оборудованных ответчиками, при поступлении информации наблюдения по данному ВС.
3,15. Назначение кодов ВРЛ в соответствии с процедурами ORCAM.
3.16. Автоматическое назначение свободного кода ВРЛ при активизации плана полета по аэродрому вылета/назначения, точкам маршрута и региону применения.
3.17. Автоматическая защита от дублирования (повторного присвоения) кодов ВРЛ.
3.18. Автоматическая корреляция плана полета с соответствующим ему треком для ВС, оборудованных ответчиками, при наличии в плане кода ВРЛ, на основе:
сравнения кодов ВРЛ (код ВРЛ ИКАО и РФ) с данными системного плана полета;
сравнения 24 битного кода ИКАО, полученного с борта ВС, с данными системного плана полета (при наличии 24 битного кода ИКАО в плане полета);
сравнения опознавательного индекса ВС (номер рейса, Aircraft Id), полученного с борта ВС, с данными системного плана полета.
3.19. Сохранение корреляции системного плана полета и системного трека при изменении ВС кода ВРЛ.
3.20. Автоматический расчет пространственно-временных траекторий полета ВС на основе данных плана полета, корректируемого по данным системы наблюдения, с учетом характеристик ВС и параметров ветра.
3.21. Автоматический переход в режим отображения местоположения ВС «трек по плану» при пропадании информации наблюдения (время задержки перехода - ИПС) по данному ВС с соответствующей индикацией и возможностью ручного отключения данной функции при конфигурировании АРМ.
3.22. Возможность ручного выбора диспетчером режима отображения местоположения ВС «трек по плану» при отсутствии информации наблюдения по данному ВС с соответствующей индикацией.
3.23. Автоматическое распределение плановой информации по рабочим местам диспетчеров (секторам) КСА УВД в соответствии с расчетом пространственно-временной траектории полета ВС и ручное (принудительное) распределение по выбранным диспетчером рабочим местам диспетчеров КСА УВД.
3.24. Автоматический расчет планируемой загрузки аэропорта (числа взлетно-посадочных операций (далее - ВПО)) на основе плановой информации.
3.25. Автоматическая передача в КСА ПИВП информации о фактически выполненном полете ВС.
3.26. Формирование на основе данных планирования ИВП и распечатка списков:
планируемых полетов по видам (типам) полетов, на заданный интервал времени, по зонам и районам ОрВД;
активных планов полетов по видам (типам) полетов;
действующих и планируемых ограничений ИВП.
3.27. Обеспечение операций диспетчерского обслуживание воздушного движения на условных маршрутах ОВД и в воздушном пространстве свободной маршрутизации:
ведение в базе данных КСА УВД информации об условных маршрутах ОВД типов CDR1, CDR2, CDR3 и их выделенное отображение на индикаторах воздушной обстановки;
ведение в базе данных КСА УВД информации о доступности условных маршрутов ОВД типов CDR1, CDR2, CDR3 на период до 8 часов (ИПС) вперед от текущего времени и отображение текущего состояния и упрежденного до 30 мин (ИПС) состояния доступности условных маршрутов ОВД на индикаторах воздушной обстановки;
ведение в базе данных КСА УВД информации о воздушном пространстве свободной маршрутизации и ее отображение на индикаторах воздушной обстановки в соответствии с параметрами воздушного пространства свободной маршрутизации;
выполнение функциональных задач по обслуживанию воздушного движения с учетом доступности условных маршрутов ОВД, процедур спрямления при полетах по маршрутам ОВД и выполнения полетов в воздушном пространстве свободной маршрутизации.
3.28. Число обрабатываемых зон ограничений ИВП, минимально безопасных высот должно быть:
не менее 1000 зон до 100 сегментов на зону (для КСА УВД регионального центра);
не менее 800 зон до 100 сегментов на зону (для КСА УВД аэроузлового центра);
не менее 300 зон до 100 сегментов на зону (для КСА УВД аэродромного центра).
3.29. КСА УВД должен обеспечивать ввод, хранение и ведение аэронавигационной информации, возможность импорта данных в форматах ARINC 424, AIXM 5.1
4. ТРЕБОВАНИЯ К ФУНКЦИЯМ ПО ВЗАИМОДЕЙСТВИЮ КСА УВД С ВНЕШНИМИ СРЕДСТВАМИ И СИСТЕМАМИ
В КСА УВД должно обеспечиваться:
4.1. Взаимодействие со средствами единого времени (не входящими в состав КСА УВД) по сетевому протоколу синхронизации NTP.
4.2. Взаимодействие со смежными автоматизированными системами и средствами УВД с обработкой планов полетов по протоколу OLDI с использованием стандартных сообщений:
ABI (оповещение о пересечении границы зоны ответственности);
ACT (активизация);
PAC (предварительная активизация);
MAC (отмена координации);
REV (уточнение);
LAM (логическое подтверждение);
RAP (предложение условий согласования управляющим сектором);
RRV (предложение поправки условий согласования управляющим сектором);
CDN (изменение условий согласования смежным сектором);
SBY (логическое подтверждение получения сообщений диалоговой процедуры);
ACP (принятие предложенных условий согласования);
RJC (отказ от предложенных условий согласования).
4.3. Взаимодействие со смежными автоматизированными системами и средствами УВД с обработкой планов полетов по протоколу AIDC с использованием стандартных сообщений:
ABI (оповещение о пересечении границы);
CPL (активизация);
EST (активизация);
PAC (предварительная активизация);
MAC (отмена координации);
CDN (изменение условий согласования);
ACP (принятие предложенных условий согласования);
REJ (отказ от предложенных условий согласования);
TOC (передача управления ВС управляющим сектором);
AOC (принятие управления ВС смежным сектором).
4.4. Получение информации о параметрах движения ВС с использованием процедур контрактного АЗН (ADS-C) по цифровой линии передачи данных FANS1/A.
4.5. Автоматизированное взаимодействие диспетчер-пилот (CPDLC) по цифровым линиям передачи данных FANS1/A и ATN/
4.6. Поддержка выдачи диспетчерского разрешения на вылет (DCL) по цифровой линии передачи данных FANS1/A (для КСА УВД аэродромного центра ОВД).
4.7. Автоматическая передача информации наблюдения в средства АЗН-В для передачи на борт ВС (TIS-B).
4.8. Сопряжение по согласованному протоколу и обеспечение индикации состояния оборудования РМС, ЛККС, рабочего порога ВПП (для КСА УВД аэродромного центра).
5. ТРЕБОВАНИЯ К ФУНКЦИЯМ ПРИЕМА И ОТОБРАЖЕНИЯ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ
В КСА УВД должны обеспечиваться:
5.1. Прием от автоматизированных информационных систем метеорологического обеспечения (далее - АИС) по согласованному протоколу, распределение по рабочим местам (секторам) и отображение на индикаторах воздушной обстановки следующей метеорологической информации:
измеренных, вычисленных и введенных в АИС метеовеличин по аэродромам регионального центра ОВД;
местных регулярных и специальных сводок с прогнозами на посадку по аэродромам регионального центра ОВД;
сводок ATIS по аэродромам регионального центра ОВД, передаваемых по прямым каналам и в соответствии с протоколами сопряжения между АИС и системами ATIS;
фактической погоды в кодах METAR, SPECI по запасным аэродромам за пределами регионального центра ОВД;
прогнозов погоды в коде TAF по аэродромам регионального центра ОВД и запасным за его пределами, включая коррективы к ним;
данных об опасных метеорологических явлениях (далее - ОМЯ), контуров, направление и скорость перемещения зон ОМЯ, по результатам радиолокационных наблюдений;
предупреждений по аэродромам регионального центра ОВД;
данных о состоянии атмосферы в узлах сетки по географическим координатам и высотам;
информации SIGMET по району полетной информации (далее - РПИ) регионального центра ОВД, в том числе в графическом формате;
информации SIGMET по смежным РПИ;
информации AIRMET по РПИ регионального центра ОВД;
информации AIRMET по смежным РПИ;
координатной информации о запуске и координатах смещения радиозондов с аэрологических станций, расположенных в пределах регионального центра ОВД по согласованному списку;
прогноза погоды по районам полетов открытым текстом или в формате GAMET.
5.2. Учет метеорологических данных при решении задач расчета пространственно-временных траекторий полета ВС.
5.3. Автоматическое отображение оповещения о поступлении сообщений о метеоявлениях определенного типа (ИПС).
5.4. Автоматическое обновление отображаемой на индикаторах рабочих мест метеорологической информации не позднее, чем через 7 с после ее поступления в КСА УВД.
5.5. Возможность сопряжения КСА УВД аэродромного центра ОВД с автоматизированной метеорологической измерительной системой для получения формализованных метеорологических сводок по аэродрому по согласованному протоколу.
5.6. Возможность автоматизированного создания на АРМ диспетчера и отправка в адрес АИС данных о наблюдении явлений погоды по докладам экипажей ВС для формирования сообщений AIREP.
5.7. Возможность графического совмещенного отображения на экране воздушной обстановки:
контуров ОМЯ;
контуров SIGMET;
данных о состоянии атмосферы (скорость и направление ветра, температура) в узлах координатной сетки (рекомендация);
расчетных траекторий полетов радиозондов;
сообщений AIREP (рекомендация).
6. ТРЕБОВАНИЯ К ФУНКЦИЯМ АНАЛИЗА ИНФОРМАЦИИ О ТЕКУЩЕЙ И ПРОГНОЗИРУЕМОЙ ВОЗДУШНОЙ ОБСТАНОВКЕ
В КСА УВД должно обеспечиваться:
6.1. Автоматическое обнаружение на основе информации наблюдения и предупреждение диспетчеров о прогнозе нарушения норм эшелонирования.
6.2. Автоматическое обнаружение на основе информации наблюдения и сигнализация о нарушении норм эшелонирования.
6.3. Автоматическое обнаружение на основе информации наблюдения, визуальное и звуковое предупреждение диспетчеров о прогнозе и факте снижения ВС, оборудованных приемоответчиками вторичной радиолокации, автоматического зависимого наблюдения, ниже минимально безопасных высот.
6.4. Автоматическое обнаружение среднесрочных конфликтных ситуаций (далее - СКС) между ВС, выполняемое на основе данных расчета пространственно-временных траекторий полета ВС по планам полета, и отображение на ИВО соответствующего предупреждения и дополнительной информации о конфликте.
6.5. Определение СКС с учетом заданных норм эшелонирования и задаваемого интервала предсказания (ИПС):
между ВС;
между ВС и зоной ограничения полетов (запретной зоной).
6.6. Отображение результатов по обнаружению СКС:
в окне конфликтных ситуаций;
в ФС.
6.7. Автоматизированный прогноз траектории движения ВС по альтернативному маршруту с обеспечением возврата на текущий маршрут.
6.8. Автоматическое обнаружение и визуальная сигнализация на АРМ диспетчера об отклонении ВС от маршрута по плану полета (в горизонтальной плоскости).
6.9. Автоматическое обнаружение и визуальная сигнализация на АРМ диспетчера о нарушениях ВС заданных ограничений по высоте и скорости на этапе движения по стандартным траекториям посадки/вылета (STAR/SID).
6.10. Автоматическое обнаружение на основе информации наблюдения, визуальное и звуковое предупреждение диспетчеров о прогнозе (время прогнозирования - ИПС) и факте попадания ВС в зону ограничений ИВП.
6.11. Автоматическое обнаружение на основе информации наблюдения, визуальное и звуковое предупреждение диспетчеров о прогнозе (время прогнозирования - ИПС) и факте попадания ВС в зону ОМЯ.
6.12. Время задержки предупреждения о угрозах безопасности воздушного движения должно быть:
о нарушении норм эшелонирования (прогнозе и факте) - не более 0,5 с;
о СКС - не более 1 с;
об отклонении ВС от маршрута по плану полета - не более 0,5 с;
о нарушениях ВС заданных ограничений по высоте и скорости на этапе движения по STAR/SID - не более 0,5 с;
о попадании ВС в зону ограничений ИВП (прогнозе и факте) - не более 1 с;
о снижении ВС ниже МБВ (прогнозе и факте) - не более 1 с;
о попадании ВС в зону ОМЯ (прогнозе и факте) - не более 1 с.
Примечание. Под временем задержки понимается промежуток от момента поступления информации в КСА УВД до выдачи результата обнаружения угрозы безопасности на отображение и сигнализации предупреждения.
6.13. Автоматический расчет занятых эшелонов для выбранного ВС.
6.14. Автоматический расчет конфликтных эшелонов на заданный период времени (ИПС) как по текущему курсу полета, так и с учетом заданной траектории (текущего маршрута) для ВС, коррелированных с планом полета.
6.15. Возможность отображения занятых и/или конфликтных эшелонов в окнах выбора заданного эшелона для ВС и/или в специальном окне.
6.16. Автоматизированный расчет на основе анализа текущей и прогнозируемой воздушной обстановки очередности пролета определенных точек регулирования потоков ВС для посадки в аэропорту назначения (Arrival Manager - AMAN):
6.16.1 . Построение на временной шкале очередности прилетов с учетом:
доступной пропускной способности ВПП;
требуемого эшелонирования между ВС;
фактической ситуации движения;
эксплуатационных ограничений.
6.16.2. Выдача рекомендаций диспетчеру для оптимизации очередности пролета точек регулирования потоков:
время замедления для погашения задержек (TTL);
время ускорения для компенсации отставания (TTG);
рекомендации по постановке в зону ожидания.
6.16.3. . Расчет ожидаемого времени посадки ВС (определение ETA/ELDT) и его отображение на индикаторе воздушной обстановки.
6.16.4. . Автоматическое уточнение расчетного времени посадки ВС (ELDT) на основе текущих координат ВС с учетом метеоусловий по маршруту.
6.16.5. . Назначение и отображение рекомендуемого времени посадки ВС (TLDT).
6.16.6. . Автоматическое определение допустимого временного интервала/интервала по расстоянию между ВС при посадке.
6.16.7. . Распределение и отображение рекомендуемого (целевого) времени посадки ВС (TLDT) по рабочим местам.
6.16.8. . Автоматический расчет и отображение в формуляре сопровождения ВС, находящихся на схеме захода на посадку, расстояния между следующими друг за другом ВС и расстояния до порога соответствующей ВПП с учетом предполагаемой траектории полета.
6.17. Автоматизированный расчет на основе анализа текущей и прогнозируемой воздушной обстановки очередности при вылете (Departure Manager - DMAN) (только для КСА УВД аэродромного центра ОВД):
6.17.1. . Построение на временной шкале очередности вылетов с учетом:
данных подсистемы AMAN;
доступной пропускной способности ВПП;
требуемого эшелонирования между ВС;
фактической ситуации движения;
эксплуатационных ограничений;
рулежной дорожки выруливания на ВПП;
стандартного маршрута вылета по приборам (SID);
назначенного времени отправления ВС с места стоянки (TOBT).
6.17.2. . Выдача рекомендаций по оптимизации очередности событий при вылете:
назначенное время, когда ВС получит разрешение на буксировку и руление (TSAT);
назначенное время, когда ВС должно осуществить отрыв от ВПП (TTOT).
6.17.3. Отображение назначенного времени готовности ВС к отправлению (TOBT), получаемого от АСУ технологическими процессами аэропорта за 40 мин. (ИПС) (рекомендация).
6.17.4. Расчет рекомендуемого времени взлета ВС (TTOT).
6.17.4. Автоматический расчет рекомендуемого времени начала буксировки или начала руления ВС (TSAT).
6.17.5. Автоматический расчет временных интервалов, свободных для планирования операций «взлет».
6.17.6. Назначение рекомендуемого времени взлета ВС с учетом маршрута руления и противообледенительной обработки.
6.17.7. Автоматическое распределение информации о рекомендуемом времени взлета (TTOT), времени начала буксировки или руления (TSAT) по рабочим местам (секторам).
6.19. Автоматическое изменение ранее назначенных TLDT и TTOT ВС в случае ввода ограничений на использование ВПП с соответствующим пересчетом времен TSAT (для КСА УВД аэродромного центра ОВД).
6.20. Автоматизированный контроль нарушений допустимых временных интервалов между ВС, совершающими взлет/посадку, и формирование предупреждений диспетчеру (для КСА УВД аэродромного центра ОВД).
6.21. Автоматизированное согласование целевых времен взлета с целевыми временами посадки для каждой ВПП с учетом текущего и планируемого режима использования ВПП (для КСА УВД аэродромного центра ОВД).
6.22. Автоматическую коррекцию рекомендуемых времен выдачи последующих диспетчерских разрешений на основе данных о фактическом выполнении ранее выданных разрешений и фактическом прохождении маршрута движения ВС.
6.22. Сквозную индикацию информации о выданных диспетчерских разрешениях для вылетающих и прилетающих ВС по рабочим местам (секторам) (для КСА УВД аэродромного центра ОВД).
6.23. Автоматическое определение минимумов вертикального эшелонирования 300 или 600 м для ВС в пределах воздушного пространства RVSM в зависимости от наличия или отсутствия у ВС на текущий момент статуса RVSM, в том числе при обнаружении и предупреждении потенциально-конфликтных ситуаций, принятие решения о нормах эшелонирования при рассмотрении пары ВС на основе наличия/отсутствия на текущий момент статуса RVSM у обоих ВС (для КСА УВД регионального центра ОВД).
6.24. Автоматический контроль и отображение допуска ВС к полетам по RVSM (для КСА УВД регионального центра ОВД).
6.25. Автоматическую активацию/деактивацию ограничений ИВП.
6.26. Автоматический контроль и отображение допуска ВС к полетам с сеткой частот 8,33 кГц.
6.27. Автоматический контроль и выдача диспетчеру оповещения:
о передаче управления;
о приеме управления.
6.28. Возможность спрямления маршрута ВС на любую точку маршрута.
7. ТРЕБОВАНИЯ К ФУНКЦИЯМ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА РАБОЧИХ МЕСТАХ ДИСПЕТЧЕРОВ УВД
В КСА УВД должны обеспечиваться:
7.1. Отображение на АРМ диспетчера УВД следующих элементов:
основное окно воздушной обстановки;
вспомогательное окно воздушной обстановки;
списки планов полетов;
текущее временя UTC с дискретностью 1 с;
окно метеорологической информации;
окно справочной информации;
панель цифровой линии передачи данных «диспетчер - пилот»;
окно информации согласования по процедурам OLDI и/или AIDC;
окно конфликтных ситуаций;
конфигурационные окна:
окно по настройке отображения картографической информации;
окно по настройке отображения ФС.
7.2. В основном окне воздушной обстановки должны быть доступны следующие функции:
7.2.1. Управление положением и размерами отображения:
изменение масштаба (минимальный/максимальный масштаб, быстрая установка масштаба по умолчанию (ИПС));
смещение центра (плавное с помощью «мыши», смещение с помощью клавиатуры, быстрая установка центра отображения).
7.2.2. Отображение элементов картографической и аэронавигационной информации:
маршруты ОВД (осевые линии, наименование, коридоры воздушных трасс), включая условные маршруты ОВД типов CDR1, CDR2, CDR3;
зоны ответственности РЦ, АДЦ;
границ секторов (зон) МДП (ЦПИ) и смежных органов ОВД;
пунктов обязательных донесений (ПОД);
маршрутов полетов в зонах ожидания;
воздушное пространство свободной маршрутизации;
маршрутов (схем) вылета, прибытия и захода на посадку;
границ временных и постоянных зон ограничений ИВП;
данные аэродромов (взлетно-посадочные полосы, рулежные дорожки, стоянки, маршруты руления) (для КСА УВД аэродромного центра ОВД);
наземное оборудование радиотехнического обеспечения полетов (приводные радиостанции, азимутальные и дальномерные маяки);
азимутально-дальномерной сетки.
7.2.3. Управление отображением элементов:
возможность фильтрации ФС;
выбор интенсивности контуров ОМЯ для отображения;
установка векторов-измерителей;
изменение размеров шрифта ФС;
установка длины следа трека;
установка длины экстраполированного вектора трека;
смещение ФС;
отображение географических координат произвольной точки.
7.2.4. Отображение системного трека, включающего:
координатный символ (ПРЛ, ВРЛ, ВРЛ реж. S, АЗН-В, МПСН, комбинацию источников, трек по плану);
индикатор режима опознавания (SPI);
формуляр сопровождения;
линия-связка формуляра сопровождения и координатного символа;
экстраполированный вектор;
след трека.
7.2.5. Отображение некоррелированных отметок по выбранным источникам информации наблюдения.
7.2.6. Возможность визуального отличия системных треков для следующих типов ВС:
ВС, находящиеся под управлением данного рабочего места;
ВС, находящиеся под управлением других рабочих мест (секторов);
ВС, не находящиеся под управлением КСА УВД;
ВС, не имеющих допуск к RVSM;
ВС, не имеющих допуск к PBN;
ВС, выполняющее литерный рейс;
ВС государственной авиации;
ВС, выполняющих групповой полет.
7.2.7. Вызов маршрута по плану полета с отображением траектории полета, наименования РНТ, с указанием времени и высоты ее пролета, а в текущей точке «маршрута по плану» - ФС ВС.
7.2.8. Выбор векторов по времени экстраполяции и/или по дальности как персонально, так и по всем отметкам ВС одновременно.
7.2.9. Возможность построения вектора экстраполяции с учетом заданной траектории (текущего маршрута) полета для системных треков, коррелированных с планом полета.
7.2.10. Возможность нанесения на векторе экстраполяции маркеров занятия заданной высоты, а также достижимой высоты на глубину прогноза.
7.2.11. Отображение ФС следующих типов:
стандартный ФС;
выделенный ФС;
расширенный ФС.
7.2.12. Отображение стандартных ФС в зависимости для треков следующих типов:
некоррелированные треки;
коррелированные треки.
7.2.13. Возможность отображения в формуляре сопровождения:
опознавательного индекса ВС (номер рейса, регистрационный знак ВС, радиотелефонный позывной);
весовой категории ВС;
типа ВС;
текущего кода ответчика (RBS, УВД);
текущей высоты (в метрах (10х) и футах (100х));
признака абсолютной или относительной высоты;
заданного эшелона;
тенденции изменения высоты;
заданного курса (в градусах);
путевой скорости (в км/час и узлах);
заданной путевой скорости (в км/час и узлах);
заданной вертикальной скорости (в м/с или фут/мин);
остаток топлива (в процентах);
запрошенного и разрешенных эшелонов;
аэропорта вылета;
аэропорта назначения;
кодов особых ситуаций с ВС;
признака достижения граничных значений норм эшелонирования (прогноз и факт);
признака потенциально опасного сближения (прогноз и факт);
признака снижения ВС ниже МБВ (прогноз и факт);
признака попадания в зону ограничений ИВП (прогноз и факт);
признака попадания в зону опасных метеоявлений (прогноз и факт);
сектора, под управлением которого находится ВС;
поля для свободного текста.
7.2.14. Оперативное управление составом, формой и содержанием информации, отображаемой в формуляре сопровождения ВС.
7.2.15. Просмотр ФС ВС, находящихся на управлении в других секторах и ВС без плана полета.
7.2.16. Автоматический и ручной отброс ФС при их наложении. Возможность ручного перемещения ФС.
7.3. Отображение списков планов полетов в составе:
список ожидания;
список выхода;
список вылета;
список прибытия;
список ВС, находящихся под управлением;
список ВС, находящихся в зоне ожидания;
список потерь.
7.4. Отображение на ИВО зон ограничений ИВП.
7.5. Отображение на ИВО формуляров зон ограничений ИВП с указанием:
наименование зоны ограничений;
символа, определяющего уровень отсчета высоты (по давлению 760 мм рт. ст., по минимальному атмосферному давлению, приведенному к уровню моря, абсолютной высоты);
время начала и окончания действия ограничения ИВП;
нижний и верхний предел высот ограничения (в десятках метров или сотнях футов).
7.6. Возможность ручного ввода и редактирования, с привязкой к географическим координатам, произвольного полигона или пользовательских заметок с текстовой информацией.
7.7. Отображение системной и справочной информации:
табло времени и текущей даты;
обозначение сектора (зоны ЦПИ/МДП);
режим работы (рабочий, воспроизведение);
выбранный масштаб отображения;
выбранный режим измерения давления (приведенного к уровню моря, аэродромного);
выбранного источника информации наблюдения.
7.8. Выбор и отображение индивидуальных карт.
7.9. Отображение высот и эшелонов для всех элементов представления информации в следующем виде:
высота в режиме «метры» - в десятках метров с префиксом «S»;
эшелоны в режиме «метры» - в десятках метров с префиксом «S»;
высота в режиме «футы» - в сотнях футов с префиксом «F»;
эшелоны в режиме «футы» - в номерах эшелонов с префиксом «F».
7.10. Отображение путевой и вертикальной скоростей для всех элементов представления информации:
путевой скорости в целых км/ч с соответствующим обозначением;
путевой скорости в целых узлах с соответствующим обозначением;
вертикальных скоростей в целых м/с с соответствующим обозначением;
вертикальных скоростей в целых фут/мин с соответствующим обозначением, с возможностью принудительного и оперативного переключения скоростей из км/ч и м/с в узлы и фут/мин и обратно.
7.11. Выбор режимов отображения высот и эшелонов:
режим «метры» для всех элементов, содержащих высоты и эшелоны;
режим «футы» для всех элементов, содержащих высоты и эшелоны;
7.12. Автоматический расчет и отображение географических координат любой выбранной точки на ИВО.
7.13. Автоматический расчет и отображение азимута и дальности ВС относительно установленного центра координат (ИПС).
7.14. Выбор электронной сетки азимутов/дальностей с возможностью ее смещения и изменения масштаба.
7.15. Отображение на ИВО азимута/дальности:
между двумя любыми выбранными точками, находящимися в границах зоны обработки информации;
между любой выбранной точкой и треком;
между любыми двумя треками ВС.
7.16. Отображение на ИВО дополнительного окна воздушной обстановки как в более крупном, так и более мелком масштабе относительно основного окна воздушной обстановки.
7.17. Возможность сохранения персональной конфигурации (профиля) рабочего места для каждого диспетчера с возможностью ее последующего выбора на любом АРМ.
7.18. Управление информацией на основном и дополнительном мониторах (при наличии) одного АРМ КСА УВД с помощью одного комплекта клавиатуры и мыши.
7.19. Выполнение всех пультовых операций через меню, «всплывающее» при обращении к полям ФС, списков и окон с установкой курсора на предопределенном поле.
7.20. Вызов справочной информации по аэродромам.
7.21. Отображение полученных формализованных сообщений (включая NОТАМ), информации о метеообстановке и справочной информации.
7.22. Оперативное изменение полноты отображения ФС и плановых списков индивидуально на АРМ диспетчера.
7.23. Представление цветом ФС определенного статуса полета (ИПС).
7.24. Ввод информации путем обращения к полям выделенного ФС и плановых списков.
7.25. Определение положения ФС как относительно отметки и курса ВС, так и произвольно.
7.26. Включение/отключение автоотброса ФС.
7.27. Выбор размера шрифта для ФС.
7.28. Установление высотного фильтра, исключающего отображение ФС ВС, находящихся под управлением других диспетчеров.
7.29. Область уведомлений о текущих режимах отображения высот, эшелонов и скоростей в соответствующем рабочем пространстве экрана рабочего места КСА УВД.
7.30. Использование номеров эшелонов (высот), соответствующих принятой таблице эшелонов.
7.31. Ручная корректировка диспетчером информации о допуске ВС к полету по RVSM.
7.32. Оперативный вызов информации по согласованию (процедура OLDI/AIDC).
7.33. Отображение и вывод на печать статистических данных (по конфликтным и потенциально конфликтным ситуациям, нарушениям ЗЗО, нахождениям в зоне ОМЯ).
7.34. Обеспечение процедуры авторизации и доступ к функциям автоматизированного рабочего места только зарегистрированным пользователям.
8. ТРЕБОВАНИЯ К ФУНКЦИЯМ ДОКУМЕНТИРОВАНИЯ И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ
В КСА УВД должны обеспечиваться:
8.1. Автоматическая непрерывная синхронная (с привязкой к временным меткам) регистрация (документирование) всей поступающей в КСА УВД информации наблюдения, радиопеленгационной, плановой, метеорологической информации и ограничений воздушного пространства, а также регистрация информации, выдаваемой в ЛВС для отображения, в том числе:
информации о воздушной обстановке в секторах УВД и в районе в целом;
вводимых ограничений, зон их действия, оповещения о начале действия и приеме оповещений;
предупреждения о нарушениях норм эшелонирования, сигнализация о потенциально конфликтных ситуациях, сигнализация о конфликтах по планам полетов;
отклонений ВС от заданного эшелона;
снижения ВС ниже минимально безопасной высоты;
нарушения режимов, ограничений и попадания в зоны ОМЯ;
8.2. Автоматическая непрерывная регистрация всех пультовых операций диспетчеров, связанных с вводом и корректировкой информации с установлением/изменением ответственности за управление ВС, вводом, изменением или отменой ограничений воздушного пространства, в том числе:
активизации планов полетов;
всех модификаций планов после их утверждения, включая автоматическую и ручную корректировку с рабочих мест диспетчеров УВД;
формализованных сообщений, поступивших и переданных по каждому плану;
приема, изменения, активизации, отмены и ручного ввода ограничений использования воздушного пространства;
отмены планов полетов.
8.3. Рекомендация. Автоматическая регистрация образов экранов всех рабочих мест КСА УВД. Средства документирования должны обеспечивать документирование информации, отображаемой на каждом индикаторе (основном и вспомогательном) каждого рабочего места. Образы экранов должны документироваться с периодичностью (ИПС), обеспечивающей воспроизведение информации в том виде, в котором ее видел диспетчер на своем рабочем месте, без возможности изменения вида отображаемых данных.
8.4. Автоматическая регистрация информации технического управления и контроля (режимов работы, событий и состояний средств, входящих в состав КСА УВД).
8.5. Архивация записанной цифровой информации с обеспечением ее хранения не менее 30 суток.
8.6. Автоматическое синхронное (c привязкой к временным меткам) воспроизведение на выделенном рабочем месте записанной информации наблюдения, радиопеленгационной, плановой, метеорологической информации, ограничений использования воздушного пространства, пультовых операций на АРМ диспетчеров и текущего времени.
8.7. Рекомендация. Возможность синхронного воспроизведения записанных пультовых операций на АРМ диспетчеров/образов экранов и речевой информации с привязкой к временным меткам.
8.8. Воспроизведение видеоизображения в реальном, ускоренном и замедленном масштабах времени.
8.9. Возможность вывода на печать изображений зарегистрированной информации.
8.10. Запись в установленном формате зарегистрированной информации на внешний носитель.
8.11. Автоматическое вычисление и регистрация на заданном интервале времени (ИПС) (документирование с возможностью воспроизведения) расстояния между ВС, между ВС и минимальной безопасной высотой, ВС и зоной ограничений ИВП, ВС и зоной ОМЯ, по которым имело место обнаружение потенциально конфликтной ситуации/конфликтных ситуаций.
8.12. Формирование и возможность вывода на печать следующих отчетно-статистических документов:
отчета об отклонениях ВС, больше установленных по высоте и в плане;
отчета о нарушениях ИВП;
отчета о конфликтных ситуациях.
9. ТРЕБОВАНИЯ К ФУНКЦИЯМ ТЕХНИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ
В КСА УВД должны обеспечиваться:
9.1. Непрерывный контроль технического состояния КСА УВД и управление с пульта технического управления и контроля средствами комплекса и каналами передачи данных. Контролю и управлению подлежат:
системные блоки серверов и рабочих станций;
источники бесперебойного питания, входящие в состав КСА УВД (при наличии и если предусмотрено конструкцией ИБП);
индикаторы АРМ диспетчеров (если предусмотрено конструкцией мониторов);
коммутаторы локальной вычислительной сети;
системное и прикладное программное обеспечение;
внешние интерфейсы;
принтеры.
9.2. Непрерывный контроль всех элементов, отказ которых приводит к отказу элементов более высокого уровня (без учета резервирования) с глубиной не ниже типового элемента замены.
Примечание: Перечень типовых элементов замены должен быть приведен в эксплуатационной документации.
9.3. Автоматическое переключение с отказавших зарезервированных (задублированных) функциональных элементов на резервные, а также ручное переключение на резервные средства.
9.4. Ручная реконфигурация КСА УВД, включая ручное объединение (разъединение) секторов УВД и переключение на резерв рабочих мест диспетчеров.
9.5. Автоматическая индикация текущей конфигурации КСА УВД, изменений технического состояния и режимов работы оборудования.
9.6. Отображение информации о воздушной обстановке.
9.7. Возможность выбора (подключения/отключения) источников информации наблюдения, радиопеленгационной и метеорологической информации.
9.8. Возможность корректировки (бланкирования) зон обработки информации наблюдения.
9.9. Прием и отображение информации о техническом состоянии подключенных источников информации наблюдения.
9.10. Возможность принудительного перезапуска элементов КСА УВД.
9.11. Отображение сообщений функционального контроля с привязкой ко времени, имени элемента в системном журнале, а также отображение сообщений:
о действиях с техническими и программными средствами;
о пользователях, выполнивших данные действия.
9.12. Контроль и индикация загрузки вычислительных средств комплекса.
9.13. Контроль качества и загруженности каналов передачи данных от средств взаимодействующих объектов.
9.14. Возможность разрешения/запрета выдачи в обработку информации, получаемой:
от указанного источника информации наблюдения;
из указанного канала передачи данных.
9.15. Выдача звуковой и цветовой сигнализации при отказе контролируемых технических средств, каналов связи и изменения их состояния (режимов работы).
9.16. Документирование и воспроизведение информации функционального контроля состояния технических средств и программного обеспечения, о конфигурации КСА УВД и пультовых операций инженерно-технического персонала.
9.17. Выдача и отображение информации о состоянии и конфигурации КСА УВД на момент начала интервала воспроизведения.
9.18. Архивация записанной информации технического контроля с обеспечением ее хранения не менее 30 суток.
9.19. Представление записанной ранее информации в последовательности, соответствующей хронологии ее поступления.
9.20. Формирование и печать системного журнала (сообщения функционального контроля, пультовые операции системного инженера).
9.21. Формирование выборки системного журнала по заданным критериям (интервал времени, наименование элемента подлежащего контролю в соответствии с п. 9.1, типы сообщений) с возможностью ее отображения для просмотра и распечатки.
9.22. Исключение возможности редактирования и несанкционированного удаления задокументированной информации, в т.ч. данных системного журнала.
9.23. Воспроизведение (отображение, печать) информации о воздушной обстановке, в том числе всех входных кодограмм по всем каналам передачи данных.
9.24. Администрирование и защита от неправильных вводов инженерно-технического персонала.
9.25. Отображение системного времени.
9.26. Единая синхронизация вычислительных процессов в комплексе, автоматическая привязка таймеров вычислительных средств комплекса к шкале системного времени и выдача на отображение текущего времени в случае отсутствия информации от средств единого времени.
9.27. Корректировка состава и параметров источников информации наблюдения и АРП без перезапуска серверов обработки информации наблюдения КСА УВД.
10. ТРЕБОВАНИЯ ДЛЯ ОБЕСПЕЧЕНИЯ РАБОТЫ МЕСТНОГО ДИСПЕТЧЕРСКОГО ПУНКТА (ЦЕНТРА ПОЛЕТНОЙ ИНФОРМАЦИИ)
В КСА УВД должно обеспечиваться:
10.1. Печать (по ручному вводу с использованием диалоговых средств) суточных планов ИВП по заданным типам полетов (на основе данных планов полетов, поступивших по телеграфным каналам или введенным вручную).
10.2. Отображение дополнительной картографической информации в пределах зоны МДП (ЦПИ) следующих объектов:
леса;
реки, озера и исскуственные водоемы;
дороги железные, магистральные, грунтовые и проселочные;
просеки;
линии электропередач;
административные границы населенных пунктов;
государственные границы;
границы морей и океанов.
10.3. Автоматический расчет и отображение для заданных географических координат параметров естественного освещения: времени восхода и захода Солнца.
10.4. Возможность ручного ввода с помощью диалоговых средств для индикации на назначенном АРМ диспетчера текущего значения минимального приведенного давления QNH района МДП (при отсутствии возможности автоматического получения метеорологических данных).
10.5. Ввод и индикация данных об атмосферном давлении в единицах измерения: Па (гПа), мм рт. ст.
10.6. Возможность моделирования развития воздушной обстановки на основе планов полетов и их текущих изменений («трек по плану») с помощью диалоговых средств.
10.7. Информационная поддержка расчета сборов за аэронавигационное обслуживание:
10.7.1. хранение, ведение и отображение электронных векторных карт местности крупного масштаба с отображением границ воздушного пространства классов С и G с возможностью поиска населенных пунктов по названиям и географическим координатам;
10.7.2. имитация движения воздушных судов (далее - ВС), выполняющих полеты ниже нижнего эшелона, на основании плановой информации (формирование и отображение треков по плану) с возможностью ручной корректировки данных (точек маршрута и времени их пролета ВС);
10.7.3. автоматическая фиксация пересечений ВС (точек и времени пересечения) границ воздушного пространства каждого класса (А+С, С, G), как по наблюдаемым ВС, так и по трекам по плану, с целью формирования сообщений - сводок о фактическом движении ВС и статистики;
10.7.4. функция контроля за выдерживанием планового маршрута, а также времени вылета и времени посадки в пункте назначения по полетам ниже нижнего эшелона;
10.7.5. индикация параметров и статуса текущей позиции/состояния ВС (планируемый, отложен/перенесен, взлетел/в пути, посадка), выполняющих полеты ниже нижнего эшелона;
10.7.6. представление прогнозных/рассчитанных данных по пролету следующей(их) по маршруту точки(ек) по плану полета после пролета очередной и фиксация параметров пролета (автоматически - по наблюдаемым ВС, вручную диспетчером по информации докладов) для полетов ниже нижнего эшелона;
10.7.7. функции контроля своевременности поступления докладов экипажей и аварийного оповещения, а также сигнализация об этом диспетчеру для полетов ниже нижнего эшелона;
10.7.8. возможность фиксации диспетчером значений времени выхода на связь с экипажем ВС в плановой таблице (списке планов полетов), а также наличия автоматической сигнализации диспетчеру о контрольном времени выхода на связь с экипажем ВС для полетов ниже нижнего эшелона;
10.7.9. возможность изменения параметров срабатывания сигнализации о контрольном времени выхода на связь с экипажем ВС при полетах в воздушном пространстве класса G и класса С;
10.7.10. дополнительные возможности по корректировке информации диспетчером:
· корректировка плановой информации по результатам ввода новых данных диспетчером с АРМ;
· автоматическое формирование, хранение, отправка сообщений - сводок о пересечении воздушными судами границ воздушного пространства различных классов (А+С, С, G) на основании автоматически фиксируемых, а также вводимых диспетчером вручную и хранящихся в КСА УВД данных о пересечениях, и дальнейшая их выдача по команде диспетчера (установленному регламенту) внешним абонентам (во взаимодействующие системы) в согласованном формате;
· ручной ввод данных о пересечении воздушными судами границ воздушного пространства различных классов (А+С, С, G);
· ручная корректировки автоматически сформированной сводки о пересечении воздушными судами границ воздушного пространства различных классов (А+С, С, G) на основании автоматически фиксируемых, а также вводимых диспетчером вручную и хранящихся в КСА УВД данных о пересечениях, и дальнейшая их выдача по команде диспетчера (установленному регламенту) внешним абонентам (во взаимодействующие системы) в согласованном формате.
11. ТРЕБОВАНИЯ ДЛЯ ОБЕСПЕЧЕНИЯ РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ НА ПЛОЩАДИ МАНЕВРИРОВАНИЯ АЭРОДРОМА (ДЛЯ КСА УВД аэродромного центра)
В КСА УВД должно обеспечиваться:
11.1. Сопряжение, прием, обработка и отображение информации, поступающей от:
РЛС ОЛП;
аэродромной МПСН;
системы АЗН-В;
АСУ технологических процессов аэропорта (рекомендация);
системы контроля и управления светосигнальным оборудованием аэродрома (рекомендация).
11.2. Объединение информации от всех источников информации наблюдения.
11.3. Отображение схемы аэродрома, включающей:
границы и осевые линии ВПП;
статус ВПП («Рабочая»/«Нерабочая»);
занятость ВПП;
рабочий курс посадки/взлета;
границы и осевые линии МРД;
границы перронов;
осевые линии РД;
стоп-линии и их состояние;
стоянки ВС (при этом занятые и свободные стоянки должны отображаться различным образом);
зоны ограничений.
11.4. Контроль движения ВС и ТС в районе ВПП и на рабочей площади аэродрома на основе автоматического приема, обработки и отображения информации наблюдения, плановой и аэронавигационной информации, метеорологической информации (включая информацию о наличии условий ограниченной видимости) и информации о режиме работы ВПП.
11.5. Автоматическое сопровождение целей, находящихся на площади маневрирования по данным информации наблюдения в диапазоне скоростей 0 - 460 км/ч, а также вертолетов, находящихся в режиме «висения».
11.6. Автоматическое сопровождение отметок не менее чем от 400 объектов (ВС, транспортных средств) на рабочей площади аэродрома (ВПП, рулежные дорожки, перрон).
11.7. Автоматический ввод и сопровождение целей в заданных зонах сопровождения.
11.8. Возможность ручной идентификация целей.
11.9. Возможность маркировки целей по всей зоне действия средств наблюдения с возможностью ручного аннулирования маркировки.
11.10. Автоматизированное назначение маршрутов руления ВС «от стоянки до ВПП» и «от ВПП до стоянки» и отображения данных маршрутов на ИВО КСА УВД.
11.11. Возможность ручного назначения и изменения маршрутов движения ВС и ТС в пределах рабочей площади аэродрома.
11.12. Автоматическое обнаружение конфликтных ситуаций на ВПП, выдачу предупреждений диспетчеру о:
потенциальном нарушении дистанции (интервала) между вылетающими/прибывающими ВС и объектами (ВС, транспортными средствами или первичными целями) на ВПП;
потенциальном нарушении дистанции (интервала) между вылетающими/прибывающими ВС и объектами, приближающимся к ВПП;
потенциальном нарушении дистанции (интервала) между прибывающими ВС и вертолетами, приближающимися к ВПП ниже заданной высоты;
взлете ВС с закрытой ВПП или прибытии ВС на закрытую ВПП;
взлете/посадке ВС с курсом, противоположным курсу взлета/посадки ВПП;
взлете/посадке ВС без диспетчерского разрешения;
занятии ВС исполнительного старта без диспетчерского разрешения;
посадке ВС на ВПП, отличающуюся от назначенной ВПП посадки;
занятии ВС исполнительного старта на ВПП, отличающейся от ВПП, назначенной для взлета;
приближении не идентифицированных целей к ВПП и их выезд на ВПП;
пересечении ВС/транспортным средством активной (включенной) стоп-линии;
задержке освобождения ВПП воздушным судном.
11.13. Автоматическое обнаружение конфликтных ситуаций на РД, выдачу предупреждений диспетчеру о:
выезде ВС на закрытую РД;
въезде ВС или ТС в зону ограничения;
рулении ВС со скоростью выше установленной;
отклонении ВС или ТС от заданного маршрута;
начала движения ВС без диспетчерского разрешения.
11.14. Автоматическая выдача сигнализации о занятости ВПП по данным информации средств наблюдения на аэродроме.
11.15. Автоматизированная регистрация факта взлета и посадки по данным информации средств наблюдения на аэродроме.
11.16. Плавное изменение масштаба отображения от 100 до 5000 м и смещение центра.
11.17. Рекомендация. Обеспечение возможности управления стоп-линиями при сопряжении с системой светосигнального оборудования аэродрома.
11.18. Рекомендация. Обеспечение возможности управления светосигнальным оборудованием вдоль назначенного маршрута руления по принципу «Follow the Green» при сопряжении с системой светосигнального оборудования аэродрома.
11.19. Возможность отображения участка карты аэродрома в дополнительном окне, с возможностью изменения масштаба и угла поворота.
11.20. Возможность оперативного изменения состава карты аэродрома.
11.21. Бесшовное наблюдение (плавный переход) за полётами ВС в окрестностях аэродрома и передвижениями по его поверхности.
Обзор документа
Планируется установить требования к радиотехническому оборудованию и оборудованию авиационной электросвязи, используемым для обслуживания воздушного движения.
Они будут обязательны для лиц, которые эксплуатируют, разрабатывают, производят, проектируют оборудование, а также выполняют монтажные и пусконаладочные работы.